أدلة خاصة بالنظام الأساسي
نظام التشغيل Android (Kotlin/Java)
Android NDK (C)
Unity (AR Foundation)
محرّك غير حقيقي
وبصفتك مطوّر تطبيقات في الواقع المعزّز، قد تحتاج إلى دمج البيئة الافتراضية بسهولة مع الواقع الافتراضي للمستخدمين. عندما يضع المستخدم كائنًا افتراضيًا في المشهد، فإنه يريد أن يبدو وكأنه ينتمي إلى العالم الحقيقي. إذا كنت تنشئ تطبيقًا للمستخدمين لشراء الأثاث، فأنت تريدهم أن يكونوا واثقين من أن الكرسي الذي هم على وشك شرائه سيتناسب مع مساحتهم.
تساعد Depth API كاميرا الجهاز في فهم حجم وشكل العناصر الحقيقية في المشهد. فهي تنشئ صورًا معمّقة أو خرائط متعمقة، ما يضيف طبقة من الواقعية إلى تطبيقاتك. يمكنك استخدام المعلومات المقدَّمة من خلال صورة العمق لإتاحة تجارب مستخدم غامرة وواقعية.
حالات الاستخدام للتطوير باستخدام Depth API
يمكن لواجهة برمجة التطبيقات Depth API تعزيز انسداد العناصر والانغماس المحسّن والتفاعلات الجديدة التي تعزّز الواقعية في تجارب الواقع المعزّز. في ما يلي بعض الطرق التي يمكنك من خلالها استخدام هذا النموذج في مشروعاتك الخاصة. للحصول على أمثلة عن العمق أثناء العمل، يمكنك استكشاف عيّنة من المشاهد في ARCore Depth Lab الذي يعرض طرقًا مختلفة للوصول إلى بيانات العمق. تطبيق Unity هذا مفتوح المصدر على GitHub.
تفعيل ميزة التظليل
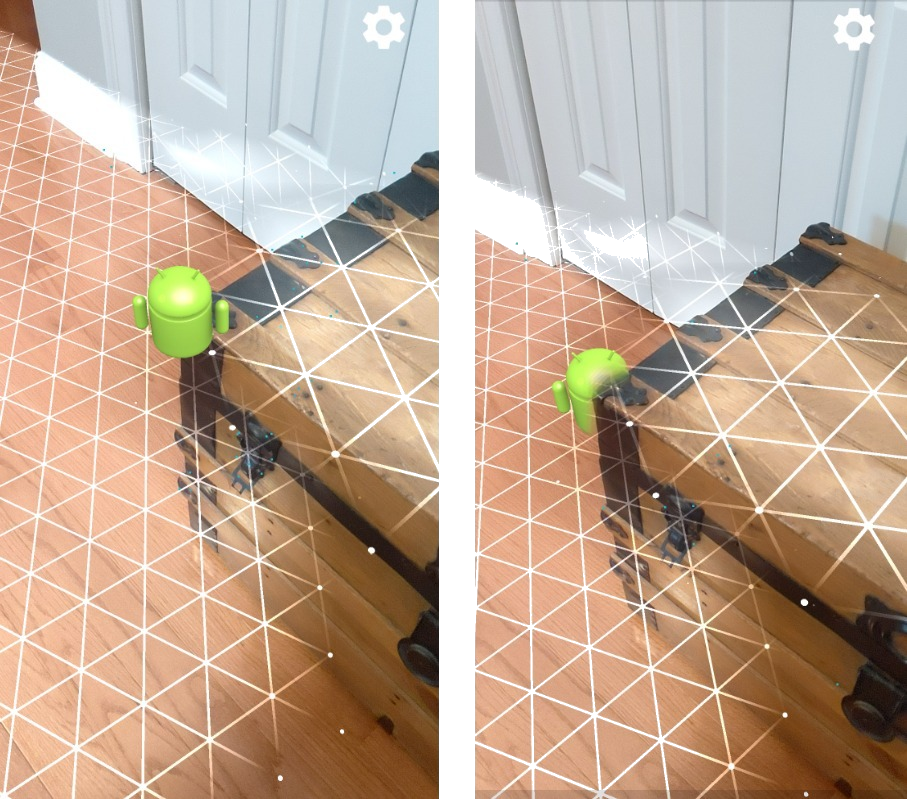
إنّ التعتيم أو عرض كائن افتراضي بدقة خلف أجسام واقعية يحظى بأهمية بالغة في تجربة الواقع المعزّز الغامرة. فكر في "آندي" الافتراضي الذي قد يرغب المستخدم في وضعه في مشهد يحتوي على صندوق السيارة بجانب الباب. عند عرض "آندي" بدون عوائق، سيتداخل بشكل غير واقعي مع حافة صندوق السيارة. إذا اعتمدت على عمق المشهد وعرفت مدى بُعد "آندي" الافتراضي عن البيئة المحيطة مثل الجذع الخشبي، يمكنك تمثيل "آندي" بدقة بسبب انسدادات، ما يجعله يبدو أكثر واقعية في ما يحيط به.
حوِّل المشهد
يمكنك عرض المستخدمين في عالم جديد غامر من خلال عرض رقاقات ثلج افتراضية للاستقرار على أذرعهم ووسائدهم، أو إلقاء الضوء على غرفة المعيشة في ضباب ضبابي. يمكنك استخدام ميزة "العمق" لإنشاء مشهد تتفاعل فيه الأضواء الافتراضية وتختبئ خلفه وأعِد إضاءة عناصر حقيقية.
مسافة وعمق الحقل
هل تريد إظهار شيء بعيد؟ يمكنك استخدام قياس المسافة وإضافة تأثيرات عمق الحقل، مثل تعتيم خلفية أو مقدمة مشهد، باستخدام Depth API.
تفعيل تفاعلات المستخدم مع عناصر الواقع المعزّز
يتيح التطبيق للمستخدمين إمكانية "تلامس" العالم من خلال تطبيقك عن طريق السماح للمحتوى الافتراضي بالتفاعل مع العالم الحقيقي عن طريق التصادم والفيزياء. استخدِم العناصر الافتراضية لتجاوز العقبات في العالم الحقيقي أو استخدِم كرات الطلاء الافتراضية لترديدها على شجرة حقيقية. عند دمج التصادم العميق مع فيزياء الألعاب، يمكنك إضفاء الحيوية على هذه التجربة.
تحسين اختبارات النتائج
يمكن استخدام العمق لتحسين نتائج اختبار النتائج. لا تعمل اختبارات ضرب الطائرات إلا على الأسطح المستوية ذات القوام، في حين تكون اختبارات العمق للعمق أكثر تفصيلاً وتعمل حتى على المناطق غير المسطحة والمنخفضة الزخارف. وذلك لأن اختبارات النتائج العمق تستخدم معلومات العمق من المشهد لتحديد العمق والاتجاه الصحيحين لنقطة.
في المثال التالي، تمثل مؤشرات آندي الخضراء اختبارات عادية للطائرات، في حين تمثل صور آندي الحمراء اختبارات نتائج عن عمق.
توافق الجهاز
لا تتوافق واجهة برمجة التطبيقات Depth API إلا مع الأجهزة المزوَّدة بقدرات معالجة لتعزيز العمق، ويجب تفعيلها يدويًا في ARCore على النحو الموضَّح في تفعيل العمق.
وقد توفر بعض الأجهزة أيضًا أداة استشعار عمقها، مثل أداة استشعار وقت الطيران. يُرجى الرجوع إلى صفحة الأجهزة المتوافقة مع ARCore للاطّلاع على أحدث قائمة بالأجهزة التي تتيح Depth API، بالإضافة إلى قائمة بالأجهزة التي تتضمّن أداة استشعار عمق الأجهزة المتوافقة، مثل مستشعر ToF.
الصور المفصَّلة
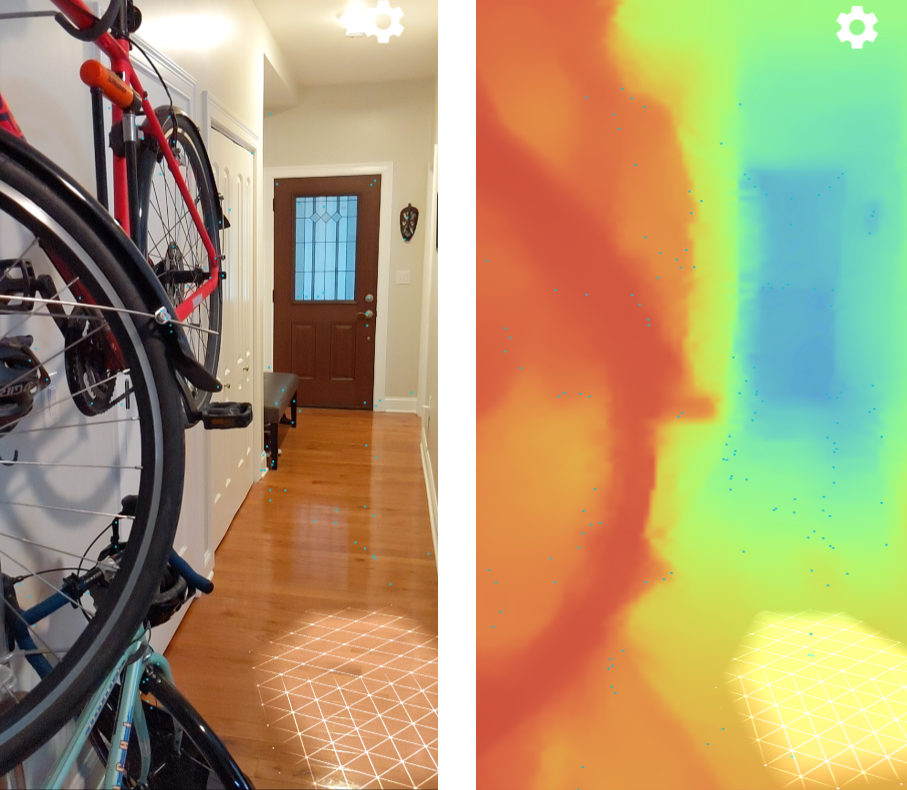
تستخدم واجهة برمجة التطبيقات Depth API خوارزمية العمق من الحركة لإنشاء صور متعمقة، والتي تعطي عرضًا ثلاثي الأبعاد للعالم. يرتبط كل بكسل في صورة العمق بقياس بُعد المشهد عن الكاميرا. تلتقط هذه الخوارزمية صورًا متعدّدة من الجهاز من زوايا مختلفة وتقارنها لتقدير المسافة مع كل بكسل عندما يحرّك المستخدم هاتفه. وتستخدم هذه التجربة تكنولوجيا تعلُّم الآلة بشكل انتقائي لزيادة عمق المعالجة، حتى مع الحد الأدنى من الحركة التي يجريها المستخدم. وتستفيد أيضًا من أي أجهزة إضافية قد تكون متوفّرة في جهاز المستخدم. إذا كان الجهاز يحتوي على مستشعر عمق مخصص، مثل ToF، ستدمج الخوارزمية البيانات تلقائيًا من جميع المصادر المتاحة. يؤدي ذلك إلى تحسين صورة العمق الحالية وتعزيز العمق حتى عندما لا تتحرك الكاميرا. وهو يوفر أيضًا عمقًا أفضل على الأسطح التي تحتوي على ميزات قليلة أو معدومة، مثل الجدران البيضاء أو في المشاهد الديناميكية التي تضمّ أشخاصًا أو أجسامًا تتحرّك.
تعرض الصور التالية صورة كاميرا لمدخل مع دراجة على الحائط، بالإضافة إلى عرض لصورة العمق التي يتم إنشاؤها من صور الكاميرا. تكون المناطق ذات اللون الأحمر أقرب إلى الكاميرا، بينما تكون المناطق ذات اللون الأزرق بعيدة.
العمق من الحركة
تصبح بيانات العمق متاحة عندما يحرّك المستخدم جهازه. ويمكن للخوارزمية الحصول على تقديرات قوية ودقيقة للعمق من 0 إلى 65 مترًا. تظهر النتائج الأكثر دقة عندما يبعد الجهاز نصف متر إلى حوالي خمسة أمتار عن المشهد في العالم الحقيقي. ستحقق التجارب التي تشجع المستخدم على تحريك جهازه بشكل أكبر نتائج أفضل وأفضل.
الحصول على صور عميقة
باستخدام Depth API، يمكنك استرداد صور معمّقة تتطابق مع كل إطار في الكاميرا. الصورة ذات العمق المكتسبة لها الطابع الزمني ومجال الرؤية نفسيهما اللتين تم استخدامهما للكاميرا. لا تتوفر بيانات العمق الصالحة إلا بعد أن يبدأ المستخدم في تحريك جهازه، نظرًا لأنه يتم اكتساب العمق من الحركة. ترتبط الأسطح ذات الميزات القليلة أو التي لا تحتوي على أي ميزات، مثل الجدران البيضاء، بعمق غير دقيق.
الخطوات التالية
- راجِع مختبر ARCore Depth Lab الذي يعرض طرقًا مختلفة للوصول إلى بيانات العمق.