邊緣偵測可用於多種圖像處理工作。除了「 卷積」一節所述的邊緣偵測核,Earth Engine 還有幾種專門的邊緣偵測演算法。Canny 邊緣偵測演算法(Canny 1986) 使用四個獨立的篩選器來識別對角、垂直和水平邊緣。計算會擷取水平和垂直方向的第一個導數值,並計算漸層大小。系統會抑制較小幅度的漸層。如要消除高頻雜訊,可視需要使用高斯核來預先篩選圖片。例如:
程式碼編輯器 (JavaScript)
// Load a Landsat 8 image, select the panchromatic band. var image = ee.Image('LANDSAT/LC08/C02/T1/LC08_044034_20140318').select('B8'); // Perform Canny edge detection and display the result. var canny = ee.Algorithms.CannyEdgeDetector({ image: image, threshold: 10, sigma: 1 }); Map.setCenter(-122.054, 37.7295, 10); Map.addLayer(canny, {}, 'canny');
請注意,threshold 參數會決定最小漸層大小,而 sigma 參數則是高斯預先篩選器的標準差 (SD),用於移除高頻雜訊。針對從邊緣偵測器擷取的線條,Earth Engine 會實作 Hough 轉換 (Duda and Hart 1972)。接續先前的範例,使用以下方法從 Canny 偵測器中擷取線條:
程式碼編輯器 (JavaScript)
// Perform Hough transform of the Canny result and display. var hough = ee.Algorithms.HoughTransform(canny, 256, 600, 100); Map.addLayer(hough, {}, 'hough');
Earth Engine 中的另一個專用演算法是 zeroCrossing()。零交點的定義是指右側、底部或對角右下方像素的符號相反的任何像素。如果這些像素中有任何一個的符號相反,則會將目前的像素設為 1 (零交點);否則會設為零。如要偵測邊緣,可以將零交點演算法套用至圖片二階導數的估計值。以下示範如何使用 zeroCrossing() 進行邊緣偵測:
程式碼編輯器 (JavaScript)
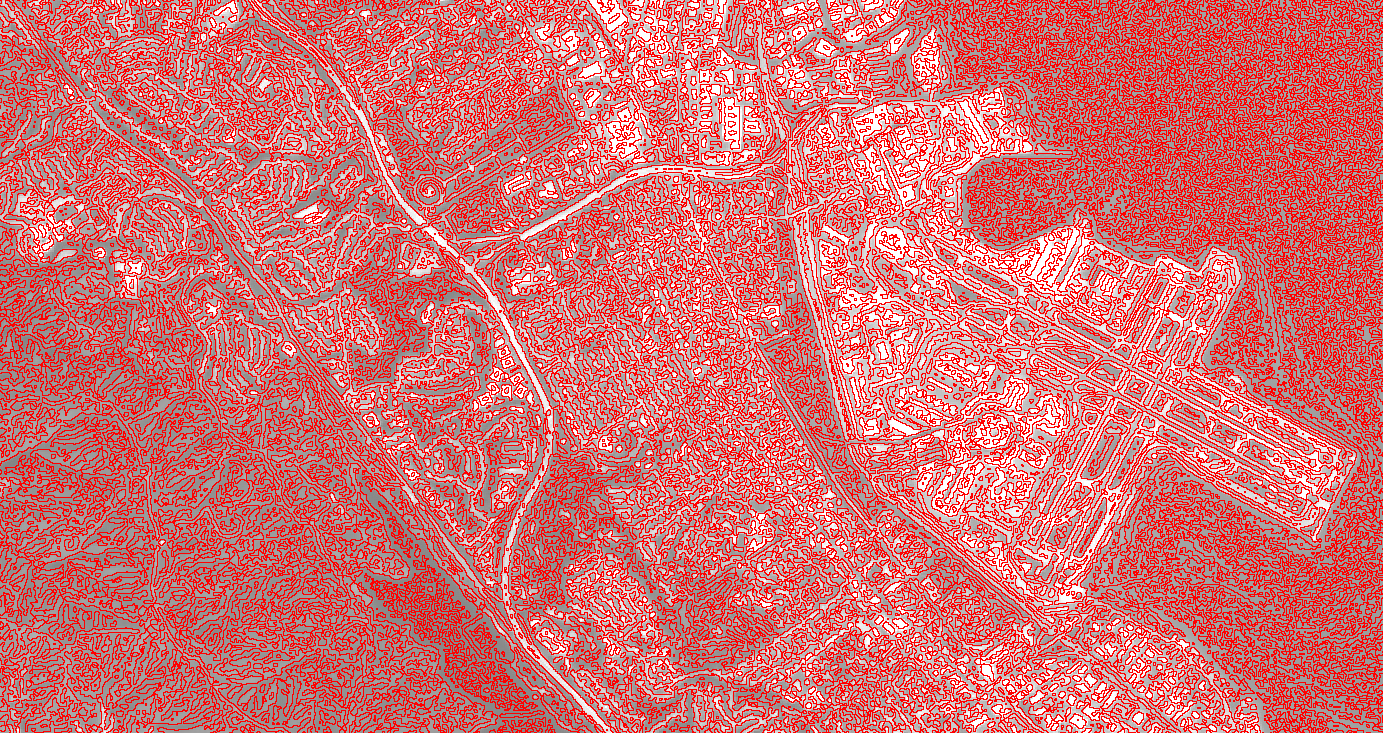
// Load a Landsat 8 image, select the panchromatic band. var image = ee.Image('LANDSAT/LC08/C02/T1/LC08_044034_20140318').select('B8'); Map.addLayer(image, {max: 12000}); // Define a "fat" Gaussian kernel. var fat = ee.Kernel.gaussian({ radius: 3, sigma: 3, units: 'pixels', normalize: true, magnitude: -1 }); // Define a "skinny" Gaussian kernel. var skinny = ee.Kernel.gaussian({ radius: 3, sigma: 1, units: 'pixels', normalize: true, }); // Compute a difference-of-Gaussians (DOG) kernel. var dog = fat.add(skinny); // Compute the zero crossings of the second derivative, display. var zeroXings = image.convolve(dog).zeroCrossing(); Map.setCenter(-122.054, 37.7295, 10); Map.addLayer(zeroXings.selfMask(), {palette: 'FF0000'}, 'zero crossings');
加州舊金山機場附近區域的零交點輸出內容應類似圖 1 所示。