
تقدّم الأقسام التالية مثالاً على مشكلة LP وتعرض كيفية حلّها. ها هي المشكلة:
يمكنك زيادة 3x + 4y إلى أقصى حد مع مراعاة القيود التالية:
x + 2y≤ 143x - y≥ 0x - y≤ 2
يتمّ وضع كل من الدالة الموضوعية 3x + 4y والقيود من خلال التعبيرات الخطية، ما يجعلها مشكلة خطية.
تحدد القيود المنطقة الممكنة، وهي المثلث الموضح أدناه، بما في ذلك الجزء الداخلي منها.

الخطوات الأساسية لحل مشكلة LP
لحل مشكلة LP، يجب أن يتضمن برنامجك الخطوات التالية:
- عليك استيراد برنامج تضمين أداة الحلّ الخطي
- توضيح أداة حلّ LP
- وتحديد المتغيرات،
- وتحديد القيود
- وتحديد الهدف
- طلب أداة حلّ LP.
- عرض الحل
الحلّ باستخدام MPSolver
يعرض القسم التالي برنامجًا يحلّ المسألة باستخدام برنامج تضمين MPSolver وأداة حل LP.
ملاحظة: لتشغيل البرنامج أدناه، تحتاج إلى تثبيت OR-Tools.
إنّ أداة حلّ التحسين الخطي الأساسية في OR-Tools هي Glop، وهي أداة داخلية لحلّ البرمجة الخطية من Google. إنه سريع وفعّال في الذاكرة ومستقر عدديًا.
استيراد برنامج تضمين أداة حلّ المساواة بين نقاط الاتصال
عليك استيراد (أو تضمين) برنامج تضمين أداة حل المساواة بين نقاط الاتصال (OR-Tools)، وهو واجهة لأدوات حلّ المشاكل الخطية وأدوات حلّ المشاكل الخطية، كما هو موضّح أدناه.
Python
from ortools.linear_solver import pywraplp
C++
#include <iostream> #include <memory> #include "ortools/linear_solver/linear_solver.h"
Java
import com.google.ortools.Loader; import com.google.ortools.linearsolver.MPConstraint; import com.google.ortools.linearsolver.MPObjective; import com.google.ortools.linearsolver.MPSolver; import com.google.ortools.linearsolver.MPVariable;
C#
using System; using Google.OrTools.LinearSolver;
تعريف أداة حلّ LP
MPsolver هو برنامج تضمين لعدة أدوات حلّ مختلفة، بما في ذلك
Glop. يعرِّف الرمز أدناه أداة حل GLOP.
Python
solver = pywraplp.Solver.CreateSolver("GLOP")
if not solver:
return
C++
std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP"));
if (!solver) {
LOG(WARNING) << "SCIP solver unavailable.";
return;
}
Java
MPSolver solver = MPSolver.createSolver("GLOP");
C#
Solver solver = Solver.CreateSolver("GLOP");
if (solver is null)
{
return;
}
ملاحظة: استبدِل PDLP بـ GLOP لاستخدام أداة حلّ بديلة للإصدار LP. لمزيد من
التفاصيل حول اختيار أدوات الحلّ، اطّلِع على
حلول LP المتقدّمة. ولتثبيت
أدوات حلّ تابعة لجهات خارجية، راجِع دليل التثبيت.
إنشاء المتغيّرات
أولاً، أنشئ المتغيرين x وy اللتين تتراوح قيمهما من 0 إلى ما لا نهاية.
Python
x = solver.NumVar(0, solver.infinity(), "x")
y = solver.NumVar(0, solver.infinity(), "y")
print("Number of variables =", solver.NumVariables())
C++
const double infinity = solver->infinity(); // x and y are non-negative variables. MPVariable* const x = solver->MakeNumVar(0.0, infinity, "x"); MPVariable* const y = solver->MakeNumVar(0.0, infinity, "y"); LOG(INFO) << "Number of variables = " << solver->NumVariables();
Java
double infinity = java.lang.Double.POSITIVE_INFINITY;
// x and y are continuous non-negative variables.
MPVariable x = solver.makeNumVar(0.0, infinity, "x");
MPVariable y = solver.makeNumVar(0.0, infinity, "y");
System.out.println("Number of variables = " + solver.numVariables());
C#
Variable x = solver.MakeNumVar(0.0, double.PositiveInfinity, "x");
Variable y = solver.MakeNumVar(0.0, double.PositiveInfinity, "y");
Console.WriteLine("Number of variables = " + solver.NumVariables());
تحديد القيود
بعد ذلك، حدد القيود على المتغيرات. امنح كل قيد اسمًا فريدًا (مثل constraint0)، ثم حدِّد معاملات القيد.
Python
# Constraint 0: x + 2y <= 14.
solver.Add(x + 2 * y <= 14.0)
# Constraint 1: 3x - y >= 0.
solver.Add(3 * x - y >= 0.0)
# Constraint 2: x - y <= 2.
solver.Add(x - y <= 2.0)
print("Number of constraints =", solver.NumConstraints())
C++
// x + 2*y <= 14. MPConstraint* const c0 = solver->MakeRowConstraint(-infinity, 14.0); c0->SetCoefficient(x, 1); c0->SetCoefficient(y, 2); // 3*x - y >= 0. MPConstraint* const c1 = solver->MakeRowConstraint(0.0, infinity); c1->SetCoefficient(x, 3); c1->SetCoefficient(y, -1); // x - y <= 2. MPConstraint* const c2 = solver->MakeRowConstraint(-infinity, 2.0); c2->SetCoefficient(x, 1); c2->SetCoefficient(y, -1); LOG(INFO) << "Number of constraints = " << solver->NumConstraints();
Java
// x + 2*y <= 14.
MPConstraint c0 = solver.makeConstraint(-infinity, 14.0, "c0");
c0.setCoefficient(x, 1);
c0.setCoefficient(y, 2);
// 3*x - y >= 0.
MPConstraint c1 = solver.makeConstraint(0.0, infinity, "c1");
c1.setCoefficient(x, 3);
c1.setCoefficient(y, -1);
// x - y <= 2.
MPConstraint c2 = solver.makeConstraint(-infinity, 2.0, "c2");
c2.setCoefficient(x, 1);
c2.setCoefficient(y, -1);
System.out.println("Number of constraints = " + solver.numConstraints());
C#
// x + 2y <= 14.
solver.Add(x + 2 * y <= 14.0);
// 3x - y >= 0.
solver.Add(3 * x - y >= 0.0);
// x - y <= 2.
solver.Add(x - y <= 2.0);
Console.WriteLine("Number of constraints = " + solver.NumConstraints());
تحديد الدالة الموضوعية
يحدّد الرمز البرمجي التالي دالة الهدف، 3x + 4y، ويحدّد أنّها تمثّل مشكلة زيادة الحد الأقصى.
Python
# Objective function: 3x + 4y. solver.Maximize(3 * x + 4 * y)
C++
// Objective function: 3x + 4y. MPObjective* const objective = solver->MutableObjective(); objective->SetCoefficient(x, 3); objective->SetCoefficient(y, 4); objective->SetMaximization();
Java
// Maximize 3 * x + 4 * y. MPObjective objective = solver.objective(); objective.setCoefficient(x, 3); objective.setCoefficient(y, 4); objective.setMaximization();
C#
// Objective function: 3x + 4y. solver.Maximize(3 * x + 4 * y);
استدعاء أداة الحلّ
يستدعي الرمز التالي أداة الحلّ.
Python
print(f"Solving with {solver.SolverVersion()}")
status = solver.Solve()
C++
const MPSolver::ResultStatus result_status = solver->Solve();
// Check that the problem has an optimal solution.
if (result_status != MPSolver::OPTIMAL) {
LOG(FATAL) << "The problem does not have an optimal solution!";
}
Java
final MPSolver.ResultStatus resultStatus = solver.solve();
C#
Solver.ResultStatus resultStatus = solver.Solve();
عرض الحلّ
تعرض التعليمة البرمجية التالية الحل.
Python
if status == pywraplp.Solver.OPTIMAL:
print("Solution:")
print(f"Objective value = {solver.Objective().Value():0.1f}")
print(f"x = {x.solution_value():0.1f}")
print(f"y = {y.solution_value():0.1f}")
else:
print("The problem does not have an optimal solution.")
C++
LOG(INFO) << "Solution:"; LOG(INFO) << "Optimal objective value = " << objective->Value(); LOG(INFO) << x->name() << " = " << x->solution_value(); LOG(INFO) << y->name() << " = " << y->solution_value();
Java
if (resultStatus == MPSolver.ResultStatus.OPTIMAL) {
System.out.println("Solution:");
System.out.println("Objective value = " + objective.value());
System.out.println("x = " + x.solutionValue());
System.out.println("y = " + y.solutionValue());
} else {
System.err.println("The problem does not have an optimal solution!");
}
C#
// Check that the problem has an optimal solution.
if (resultStatus != Solver.ResultStatus.OPTIMAL)
{
Console.WriteLine("The problem does not have an optimal solution!");
return;
}
Console.WriteLine("Solution:");
Console.WriteLine("Objective value = " + solver.Objective().Value());
Console.WriteLine("x = " + x.SolutionValue());
Console.WriteLine("y = " + y.SolutionValue());
البرامج الكاملة
تظهر البرامج الكاملة أدناه.
Python
from ortools.linear_solver import pywraplp
def LinearProgrammingExample():
"""Linear programming sample."""
# Instantiate a Glop solver, naming it LinearExample.
solver = pywraplp.Solver.CreateSolver("GLOP")
if not solver:
return
# Create the two variables and let them take on any non-negative value.
x = solver.NumVar(0, solver.infinity(), "x")
y = solver.NumVar(0, solver.infinity(), "y")
print("Number of variables =", solver.NumVariables())
# Constraint 0: x + 2y <= 14.
solver.Add(x + 2 * y <= 14.0)
# Constraint 1: 3x - y >= 0.
solver.Add(3 * x - y >= 0.0)
# Constraint 2: x - y <= 2.
solver.Add(x - y <= 2.0)
print("Number of constraints =", solver.NumConstraints())
# Objective function: 3x + 4y.
solver.Maximize(3 * x + 4 * y)
# Solve the system.
print(f"Solving with {solver.SolverVersion()}")
status = solver.Solve()
if status == pywraplp.Solver.OPTIMAL:
print("Solution:")
print(f"Objective value = {solver.Objective().Value():0.1f}")
print(f"x = {x.solution_value():0.1f}")
print(f"y = {y.solution_value():0.1f}")
else:
print("The problem does not have an optimal solution.")
print("\nAdvanced usage:")
print(f"Problem solved in {solver.wall_time():d} milliseconds")
print(f"Problem solved in {solver.iterations():d} iterations")
LinearProgrammingExample()
C++
#include <iostream>
#include <memory>
#include "ortools/linear_solver/linear_solver.h"
namespace operations_research {
void LinearProgrammingExample() {
std::unique_ptr<MPSolver> solver(MPSolver::CreateSolver("SCIP"));
if (!solver) {
LOG(WARNING) << "SCIP solver unavailable.";
return;
}
const double infinity = solver->infinity();
// x and y are non-negative variables.
MPVariable* const x = solver->MakeNumVar(0.0, infinity, "x");
MPVariable* const y = solver->MakeNumVar(0.0, infinity, "y");
LOG(INFO) << "Number of variables = " << solver->NumVariables();
// x + 2*y <= 14.
MPConstraint* const c0 = solver->MakeRowConstraint(-infinity, 14.0);
c0->SetCoefficient(x, 1);
c0->SetCoefficient(y, 2);
// 3*x - y >= 0.
MPConstraint* const c1 = solver->MakeRowConstraint(0.0, infinity);
c1->SetCoefficient(x, 3);
c1->SetCoefficient(y, -1);
// x - y <= 2.
MPConstraint* const c2 = solver->MakeRowConstraint(-infinity, 2.0);
c2->SetCoefficient(x, 1);
c2->SetCoefficient(y, -1);
LOG(INFO) << "Number of constraints = " << solver->NumConstraints();
// Objective function: 3x + 4y.
MPObjective* const objective = solver->MutableObjective();
objective->SetCoefficient(x, 3);
objective->SetCoefficient(y, 4);
objective->SetMaximization();
const MPSolver::ResultStatus result_status = solver->Solve();
// Check that the problem has an optimal solution.
if (result_status != MPSolver::OPTIMAL) {
LOG(FATAL) << "The problem does not have an optimal solution!";
}
LOG(INFO) << "Solution:";
LOG(INFO) << "Optimal objective value = " << objective->Value();
LOG(INFO) << x->name() << " = " << x->solution_value();
LOG(INFO) << y->name() << " = " << y->solution_value();
}
} // namespace operations_research
int main(int argc, char** argv) {
operations_research::LinearProgrammingExample();
return EXIT_SUCCESS;
}
Java
package com.google.ortools.linearsolver.samples;
import com.google.ortools.Loader;
import com.google.ortools.linearsolver.MPConstraint;
import com.google.ortools.linearsolver.MPObjective;
import com.google.ortools.linearsolver.MPSolver;
import com.google.ortools.linearsolver.MPVariable;
/** Simple linear programming example. */
public final class LinearProgrammingExample {
public static void main(String[] args) {
Loader.loadNativeLibraries();
MPSolver solver = MPSolver.createSolver("GLOP");
double infinity = java.lang.Double.POSITIVE_INFINITY;
// x and y are continuous non-negative variables.
MPVariable x = solver.makeNumVar(0.0, infinity, "x");
MPVariable y = solver.makeNumVar(0.0, infinity, "y");
System.out.println("Number of variables = " + solver.numVariables());
// x + 2*y <= 14.
MPConstraint c0 = solver.makeConstraint(-infinity, 14.0, "c0");
c0.setCoefficient(x, 1);
c0.setCoefficient(y, 2);
// 3*x - y >= 0.
MPConstraint c1 = solver.makeConstraint(0.0, infinity, "c1");
c1.setCoefficient(x, 3);
c1.setCoefficient(y, -1);
// x - y <= 2.
MPConstraint c2 = solver.makeConstraint(-infinity, 2.0, "c2");
c2.setCoefficient(x, 1);
c2.setCoefficient(y, -1);
System.out.println("Number of constraints = " + solver.numConstraints());
// Maximize 3 * x + 4 * y.
MPObjective objective = solver.objective();
objective.setCoefficient(x, 3);
objective.setCoefficient(y, 4);
objective.setMaximization();
final MPSolver.ResultStatus resultStatus = solver.solve();
if (resultStatus == MPSolver.ResultStatus.OPTIMAL) {
System.out.println("Solution:");
System.out.println("Objective value = " + objective.value());
System.out.println("x = " + x.solutionValue());
System.out.println("y = " + y.solutionValue());
} else {
System.err.println("The problem does not have an optimal solution!");
}
System.out.println("\nAdvanced usage:");
System.out.println("Problem solved in " + solver.wallTime() + " milliseconds");
System.out.println("Problem solved in " + solver.iterations() + " iterations");
}
private LinearProgrammingExample() {}
}
C#
using System;
using Google.OrTools.LinearSolver;
public class LinearProgrammingExample
{
static void Main()
{
Solver solver = Solver.CreateSolver("GLOP");
if (solver is null)
{
return;
}
// x and y are continuous non-negative variables.
Variable x = solver.MakeNumVar(0.0, double.PositiveInfinity, "x");
Variable y = solver.MakeNumVar(0.0, double.PositiveInfinity, "y");
Console.WriteLine("Number of variables = " + solver.NumVariables());
// x + 2y <= 14.
solver.Add(x + 2 * y <= 14.0);
// 3x - y >= 0.
solver.Add(3 * x - y >= 0.0);
// x - y <= 2.
solver.Add(x - y <= 2.0);
Console.WriteLine("Number of constraints = " + solver.NumConstraints());
// Objective function: 3x + 4y.
solver.Maximize(3 * x + 4 * y);
Solver.ResultStatus resultStatus = solver.Solve();
// Check that the problem has an optimal solution.
if (resultStatus != Solver.ResultStatus.OPTIMAL)
{
Console.WriteLine("The problem does not have an optimal solution!");
return;
}
Console.WriteLine("Solution:");
Console.WriteLine("Objective value = " + solver.Objective().Value());
Console.WriteLine("x = " + x.SolutionValue());
Console.WriteLine("y = " + y.SolutionValue());
Console.WriteLine("\nAdvanced usage:");
Console.WriteLine("Problem solved in " + solver.WallTime() + " milliseconds");
Console.WriteLine("Problem solved in " + solver.Iterations() + " iterations");
}
}
الحلّ الأمثل
يعرض البرنامج الحل الأمثل للمشكلة، كما هو موضح أدناه.
Number of variables = 2
Number of constraints = 3
Solution:
x = 6.0
y = 4.0
Optimal objective value = 34.0
وفي ما يلي رسم بياني يعرض الحلّ:
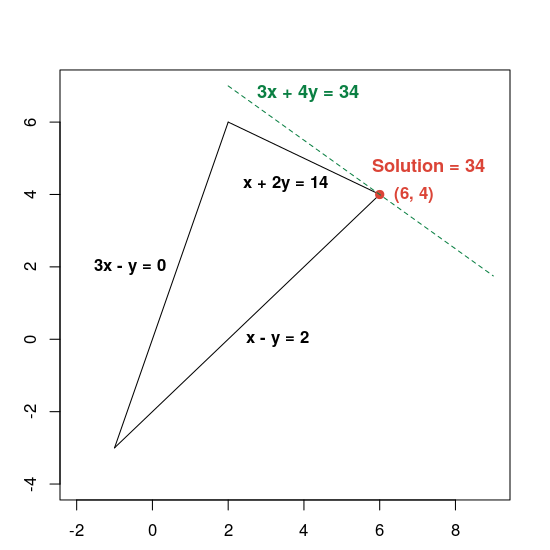
يتم تحديد الخط الأخضر المتقطع من خلال تعيين الدالة الموضوعية على قيمة مساوية للقيمة المثلى، وهي 34. أي خط تكون معادلته بالصيغة 3x + 4y = c فهو موازٍ للخط المتقطع، و34 هي أكبر قيمة لـ C التي يتقاطع فيها الخط
مع المنطقة الممكنة.
للاطّلاع على مزيد من المعلومات حول حلّ مسائل التحسين الخطي، راجِع حلّ LP المتقدّم.