
כדי ליצור איזוכרון, צריך לספק ל-API נקודת מוצא, אמצעי תחבורה כמו נהיגה, רכיבה על אופניים או הליכה, ומגבלת זמן. אפשר גם לשנות את העדפות הניתוב ואת המראה החזותי של הפוליגון שמתקבל.
טווח זמן
האילוץ העיקרי שאתם מספקים לשירות הוא travel_duration. הערך הזה מגדיר את טווח הזמן של החישוב.
- משך זמן מקסימלי: ה-API תומך בזמן נסיעה מקסימלי של 3,600 שניות (שעה אחת) במצב
DRIVE, ו-7,200 שניות (שעתיים) במצביםWALKו-BICYCLE. - ביצועים: זמן החישוב משתנה בהתאם למשך הזמן המבוקש ולשיטת הנסיעה שנבחרה. איזוכרון נסיעה של שעה אחת מכסה אזור גיאוגרפי ורשת כבישים גדולים משמעותית בהשוואה לאיזוכרון הליכה של שעה אחת, ולכן זמן האחזור של בקשת הנסיעה גבוה יותר.
- פורמט: מכיוון שה-API משתמש ב-
google.protobuf.Duration, משך הזמן צריך להיות בפורמט של מחרוזת שמסתיימת באות s (לדוגמה,"3600s") ולא בפורמט של מספר שלם.
נקודות מוצא והצמדה לכביש
אפשר לציין את נקודת ההתחלה של האיזוֹכרוֹן בשתי דרכים:
- קואורדינטות: זוג של קו רוחב וקו אורך (
location). - מזהי מקומות: מזהה ייחודי של מקום ספציפי במפות Google (
place). כשמספקים מזהה מקום, השירות משתמש בנקודת המרכז של המקום הזה כנקודת המוצא. שימו לב: ה-API מצפה לפורמט של שם המשאב, כמוplaces/ChIJ.... מידע נוסף על מזהי מקומות זמין במאמר מזהי מקומות.
לא משנה מהי שיטת הקלט, ה-API לא מחשב את זמני הנסיעה מהנקודה הפיזית המדויקת אם הנקודה הזו לא נמצאת על כביש, למשל בתוך פארק או בניין. כדי להתמודד עם המצב הזה, השירות משתמש בהצמדה לכביש. התכונות של הצמדה לכביש:
- הצמדה חכמה: השירות מנסה להצמיד את נקודת המוצא לפלח הכביש הקרוב ביותר שאפשר לנוע בו.
- התאמה למצב: הלוגיקה של ההצמדה מתחשבת ב
travel_mode. אם מבקשיםDRIVE, ה-API מתעלם מנתיבים להולכי רגל בלבד ומחפש את הרחוב הקרוב ביותר שאפשר לנסוע בו. אם מבקשיםWALK, ה-API נותן עדיפות לנתיבים להליכה ולמדרכות. - מקרים של כשל: אם ה-API לא מוצא קטע דרך מתאים במרחק של כ-100 מטרים מנקודת המוצא, הוא מחזיר שגיאה
404 NOT_FOUND. בדרך כלל זה מצביע על כך שהנקודה רחוקה מדי מרשת הכבישים או שהיא נמצאת באזור שבו נתוני המפה לא תומכים באמצעי התחבורה המבוקש.
כיוון הנסיעה (נכנסת לעומת יוצאת)
אפשר לחשב את הנגישות הנכנסת והיוצאת באמצעות הפרמטר travelDirection:
-
FROM(יוצא): חישוב השטח שאפשר להגיע אליו מ נקודת המוצא במסגרת מגבלת הזמן שצוינה. האפשרות הזו מתאימה לתרחישי שימוש כמו אזורי משלוח או כיסוי שירות. -
TO(Inbound): חישוב השטח שממנו אפשר להגיע אל נקודת המוצא בתוך מגבלת הזמן שצוינה. האפשרות הזו מתאימה לקביעת אזורי כיסוי, למשל אזורים שמהם העובדים יכולים להגיע למשרד מרכזי.
התראות על מצב התנועה
כדי לשלוט באופן שבו נתוני התנועה משפיעים על המצולע שנוצר, משתמשים בפרמטר routing_preference:
-
TRAFFIC_UNAWARE(ברירת מחדל): נעשה שימוש במגבלות מהירות ובהיררכיית כבישים כדי ליצור את מצולע האיזוֹכרוֹן. כך נוצרת צורה דטרמיניסטית שלא משתנה בהתאם לשעה ביום. הפרמטר הזה מתאים במיוחד לניתוח כללי או לתכנון תרחישים בסיסיים. -
TRAFFIC_AWARE: חישוב איזוכרונות באמצעות נתוני תנועה בזמן אמת או נתוני תנועה חזויים בזמן הבקשה, כך שהאזור שאפשר להגיע אליו מצטמצם בזמן עומס ומתרחב בשעות שאינן שעות שיא. הערה: ניתוב שמודע לתנועה נתמך רק כשtravelModeמוגדר ל-DRIVE.
החלקה ודיוק
אפשר להתאים אישית את המראה והדיוק של מצולעי הפלט באמצעות הפרמטרים polygon_fidelity ו-enable_smoothing. האפשרויות האלה פועלות באופן עצמאי, אבל הן משולבות כדי לקבוע את הצורה הסופית.
polygon_fidelity: קובע את הגודל של התאים ברשת הבסיסית שמשמשת לחישוב האזור שאפשר להגיע אליו.-
LOW: משתמש בתאים גדולים יותר ברשת. האפשרות הכי טובה לכיסוי אזורים גדולים ללא פערים, וכתוצאה מכך מתקבלת צורה כללית. -
MEDIUM: דיוק מאוזן. -
HIGH: משתמש בתאים קטנים יותר בתצוגת הרשת. התוצאה היא התאמה טובה יותר לרשת הכבישים, אבל יכולים להיווצר אזורים ריקים או חורים אם רשת הכבישים דלילה. -
POLYGON_FIDELITY_UNSPECIFIED: אם לא מציינים את הפרמטר הזה, השירות בוחר באופן דינמי את רמת הדיוק על סמך משך הנסיעה המבוקש.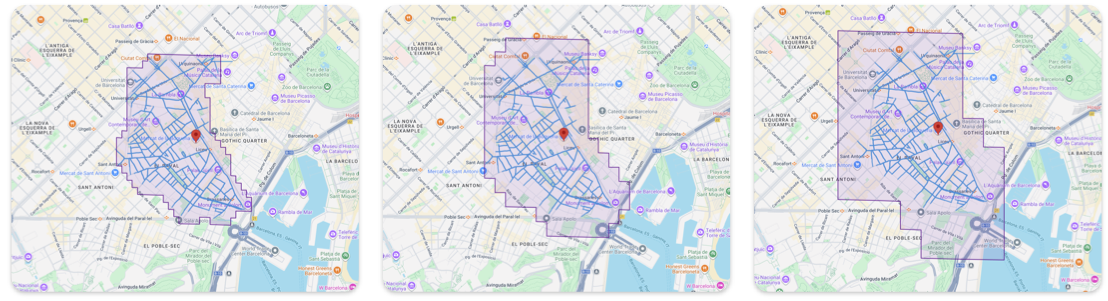
רמת דיוק גבוהה, בינונית ונמוכה של פוליגונים
-
enable_smoothing: קובע אם הפינות החדות של תאי הרשת שמוגדרים על ידי רמת הדיוק יעוגלו.-
false(Raw): ברירת המחדל. הפונקציה מחזירה את החישוב הגיאומטרי המדויק. הקצוות נראים משוננים או מדורגים. הכי מתאים לדיוק אנליטי, כמו בדיקות קפדניות של נקודה בתוך פוליגון. זמן טעינה קצר יותר מאשר בשיטה המוחלקת. -
true(החלקה): החלת אלגוריתם לעיבוד בדיעבד כדי לעגל את הפינות. האפשרות הטובה ביותר להצגה חזותית במפות.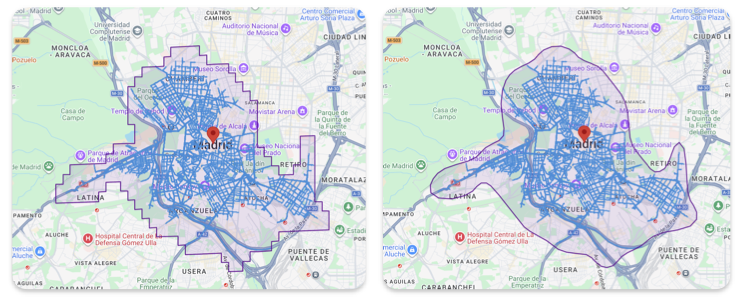
קווי זמן עם החלקה וללא החלקה
-