Page Summary
-
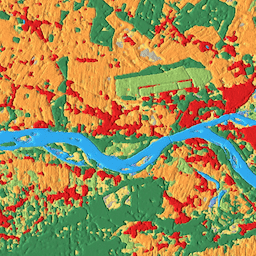
Dynamic World is a near-real-time 10m Land Use/Land Cover dataset with class probabilities and labels for nine classes.
-
The dataset is available from 2015-06-27 to present and is derived from Sentinel-2 L1C images with cloud percentage less than or equal to 35%.
-
Predictions are masked to remove clouds and cloud shadows using a combination of cloud detection methods.
-
Each image in the Dynamic World collection corresponds to an individual Sentinel-2 L1C asset.
-
To select pixels confidently belonging to a class, it is recommended to threshold the estimated probability of the top-1 prediction.
- Dataset Availability
- 2015-06-27T00:00:00Z–2026-07-24T04:35:51.596000Z
- Dataset Producer
- World Resources Institute Google
- Tags
Description
Dynamic World is a 10m near-real-time (NRT) Land Use/Land Cover (LULC) dataset that includes class probabilities and label information for nine classes.
Dynamic World predictions are available for the Sentinel-2 L1C collection from 2015-06-27 to present. The revisit frequency of Sentinel-2 is between 2-5 days depending on latitude. Dynamic World predictions are generated for Sentinel-2 L1C images with CLOUDY_PIXEL_PERCENTAGE <= 35%. Predictions are masked to remove clouds and cloud shadows using a combination of S2 Cloud Probability, Cloud Displacement Index, and Directional Distance Transform.
Images in the Dynamic World collection have names matching the individual Sentinel-2 L1C asset names from which they were derived, e.g:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
has a matching Dynamic World image named: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
All probability bands except the "label" band collectively sum to 1.
To learn more about the Dynamic World dataset and see examples for generating composites, calculating regional statistics, and working with the time series, see the Introduction to Dynamic World tutorial series.
Given Dynamic World class estimations are derived from single images using a spatial context from a small moving window, top-1 "probabilities" for predicted land covers that are in-part defined by cover over time, like crops, can be comparatively low in the absence of obvious distinguishing features. High-return surfaces in arid climates, sand, sunglint, etc may also exhibit this phenomenon.
To select only pixels that confidently belong to a Dynamic World class, it is recommended to mask Dynamic World outputs by thresholding the estimated "probability" of the top-1 prediction.
Bands
Bands
Pixel size: 10 meters (all bands)
| Name | Min | Max | Pixel Size | Description |
|---|---|---|---|---|
water |
0 | 1 | 10 meters | Estimated probability of complete coverage by water |
trees |
0 | 1 | 10 meters | Estimated probability of complete coverage by trees |
grass |
0 | 1 | 10 meters | Estimated probability of complete coverage by grass |
flooded_vegetation |
0 | 1 | 10 meters | Estimated probability of complete coverage by flooded vegetation |
crops |
0 | 1 | 10 meters | Estimated probability of complete coverage by crops |
shrub_and_scrub |
0 | 1 | 10 meters | Estimated probability of complete coverage by shrub and scrub |
built |
0 | 1 | 10 meters | Estimated probability of complete coverage by built |
bare |
0 | 1 | 10 meters | Estimated probability of complete coverage by bare |
snow_and_ice |
0 | 1 | 10 meters | Estimated probability of complete coverage by snow and ice |
label |
0 | 8 | 10 meters | Index of the band with the highest estimated probability |
label Class Table
| Value | Color | Description |
|---|---|---|
| 0 | #419bdf | water |
| 1 | #397d49 | trees |
| 2 | #88b053 | grass |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | crops |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | built |
| 7 | #a59b8f | bare |
| 8 | #b39fe1 | snow_and_ice |
Image Properties
Image Properties
| Name | Type | Description |
|---|---|---|
| dynamicworld_algorithm_version | STRING | The version string uniquely identifying the Dynamic World model and inference process used to produce the image. |
| qa_algorithm_version | STRING | The version string uniquely identifying the cloud masking process used to produce the image. |
Terms of Use
Terms of Use
This dataset is licensed under CC-BY 4.0 and requires the following attribution: "This dataset is produced for the Dynamic World Project by Google in partnership with National Geographic Society and the World Resources Institute."
Contains modified Copernicus Sentinel data [2015-present]. See the Sentinel Data Legal Notice.
Citations
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOIs
Explore with Earth Engine
Code Editor (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m