Make the world your canvas
Create world scale immersive experiences in over 100 countries using the largest cross-device augmented reality platform. ARCore enables you to seamlessly blend physical and digital worlds using easy to integrate workflows and our learned understanding of the world through Google Maps.
ARCore
Features
ARCore fundamentals
- Motion tracking, which shows positions relative to the world
- Anchors, which ensures tracking of an object’s position over time
- Environmental understanding, which detects the size and location of all types of surfaces
- Depth understanding, which measures the distance between surfaces from a given point
- Light estimation, which provides information about the average intensity and color correction of the environment
Geospatial API
Scene Semantics
Recording and Playback API
Depth API
Persistent Cloud Anchors
Streetscape Geometry
Featured Partners



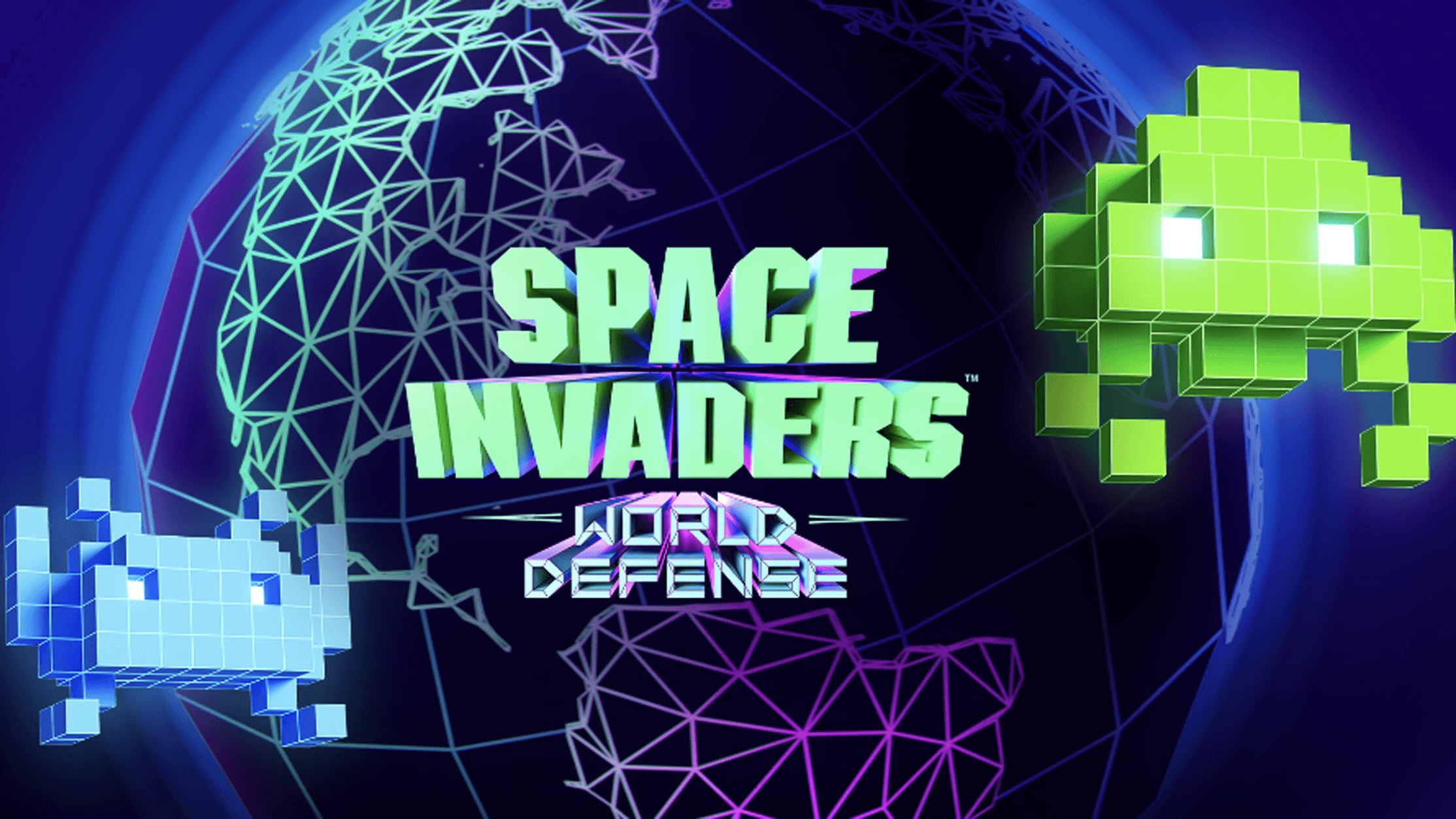
TAITO turns the world into a playground with SPACE INVADERS immersive AR game

Scavengar highlights women pioneers through immersive monuments

Gap and Mattel transform the Times Square Gap Store into a Barbie experience
Our Community
“The whole team was incredibly enthusiastic about trying the Geospatial API. We [had] the idea for a world scale alien invasion game for more than 3 years and we were waiting for the right tech to become available to finally start making it a reality… Augmented Reality. And when we got Geospatial and started checking it the results exceeded our wildest expectations greatly!"
Featured Hackathon Submissions

World Ensemble
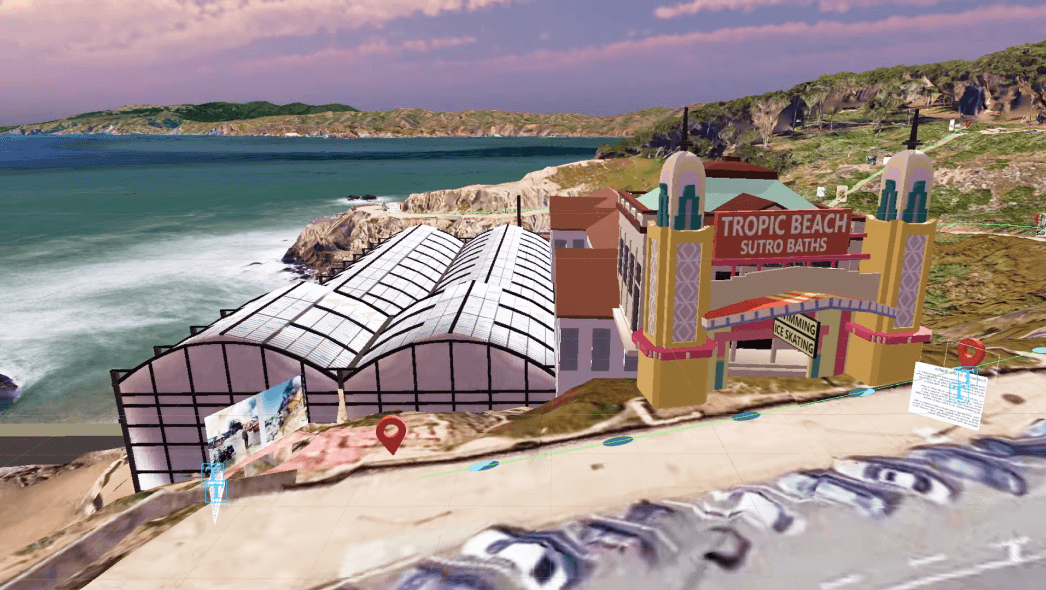
Sutro Baths AR Tour
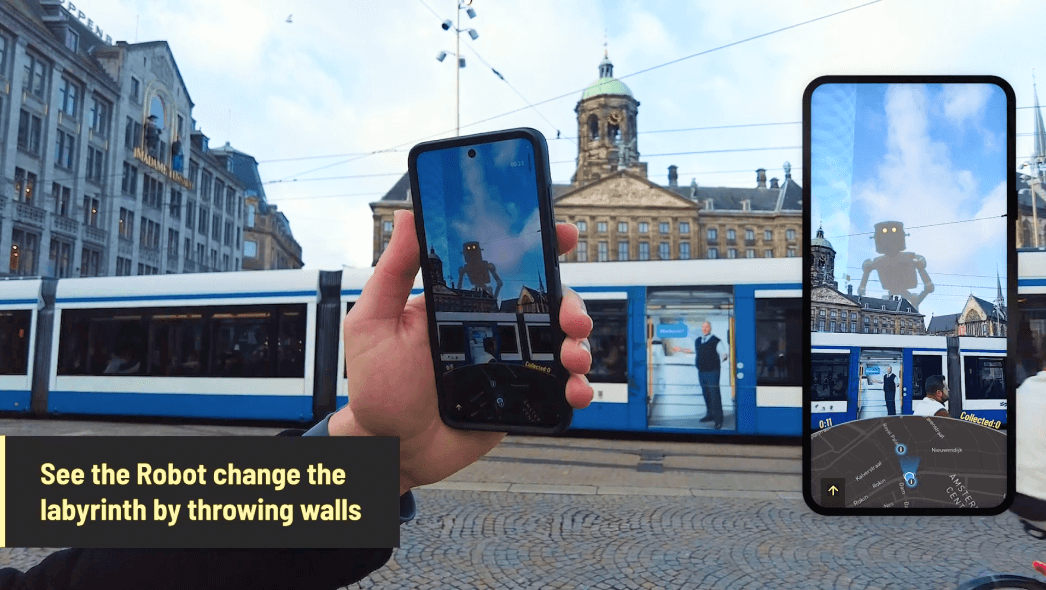
GEOMAZE - The Urban Quest

Simmy
Congratulations to the winners of Google’s Immersive Geospatial Challenge
Check out the winners from our latest hackathon featuring submissions using Geospatial Creator in five different categories, including Entertainment & Events and Commerce.
Congratulations to the winners of the ARCore Geospatial API Challenge
Check out the winners from our previous hackathon featuring submissions using the ARCore Geospatial API in five different categories, including Gaming and Navigation.
The Latest on ARCore & Geospatial Creator
FEATURED BLOG POST
How We Made SPACE INVADERS: World Defense
Learn how the ARCore Geospatial API was used in the SPACE INVADERS: World Defense game to make the world your playground. Discover how the Streetscape Geometry API and Geospatial Creator helped make an immersive augmented reality game.
Dive right in

Android
iOS

Web
Adobe Aero
