
如需生成等时线,请向 API 提供起点、出行方式(例如驾车、骑车或步行)和时间限制。您还可以调整路线偏好设置以及生成的多边形的视觉外观。
时间范围
您提供给服务的主要约束条件是 travel_duration。这定义了计算的时间范围。
- 最长时长:该 API 支持
DRIVE模式下的最长行程时间为 3600 秒(1 小时),WALK和BICYCLE模式下的最长行程时间为 7200 秒(2 小时)。 - 性能:计算时间会随着所请求的时长和所选的出行方式而变化。与 1 小时的步行等时线相比,1 小时的驾车等时线覆盖的地理区域和道路网络要大得多,因此驾车请求的延迟时间更长。
- 格式:由于该 API 使用
google.protobuf.Duration,因此时长必须采用以“s”结尾的字符串格式(例如"3600s"),而不是整数。
起点和道路贴合
您可以通过两种方式指定等时线的起点:
- 坐标:纬度和经度对 (
location)。 - 地点 ID:Google 地图上特定地点的唯一标识符 (
place)。如果您提供地点 ID,该服务会将相应地点的质心用作原点。请注意,该 API 需要资源名称格式,例如places/ChIJ...。如需详细了解地点 ID,请参阅地点 ID。
无论采用哪种输入方法,如果确切的实体点不在道路上(例如在公园或建筑物内),该 API 都不会计算从该点出发的出行时间。为了应对这种情况,该服务会使用道路贴合功能。道路贴合具有以下功能:
- 智能贴合:该服务会尝试将起点贴合到最近的可通行路段。
- 模式感知:贴靠逻辑会考虑您的
travel_mode。如果您请求DRIVE,API 会忽略仅供行人通行的道路,并寻找最近的可行驶街道。如果您请求WALK,API 会优先考虑可步行的小路和人行道。 - 失败情况:如果 API 在起点的大约 100 米范围内找不到合适的道路段,则会返回
404 NOT_FOUND错误。这通常表示该点距离道路网络太远,或者位于地图数据不支持所请求出行方式的区域。
旅行方向(入境与出境)
您可以使用 travelDirection 参数计算入站和出站可达性:
FROM(出站):计算在指定时间限制内从原点可到达的区域。这适用于配送区域或服务覆盖范围等使用情形。TO(入界):计算在指定时间限制内可从哪些区域到达原点的区域。这适用于确定集水区,例如员工可以从哪些地方通勤到中央办公室。
流量意识
使用 routing_preference 参数控制路况数据对生成的多边形的影响:
TRAFFIC_UNAWARE(默认):使用限速和道路分层结构生成等时面多边形。这样会生成一个确定性形状,不会因一天中的时间而波动。此形参非常适合进行一般分析或基准情景规划。TRAFFIC_AWARE:使用请求时的实时或预测交通状况计算等时线,导致可达区域在拥堵时缩小,在非高峰时段扩大。注意:只有在travelMode设置为DRIVE时,才支持流量感知型路由。
平滑度和保真度
您可以使用 polygon_fidelity 和 enable_smoothing 参数自定义输出多边形的外观和精确度。虽然这些选项是独立的,但它们共同决定了最终的形状。
polygon_fidelity:控制用于计算可达区域的底层网格单元的大小。LOW:使用更大的网格单元。最适合覆盖大面积区域而不留空隙,从而形成广义形状。MEDIUM:平衡精度。HIGH:使用较小的网格单元。可更紧密地贴合道路网络,但如果道路网络稀疏,可能会产生空白区域或孔洞。POLYGON_FIDELITY_UNSPECIFIED:如果未指定,服务会根据请求的出行时长动态选择保真度。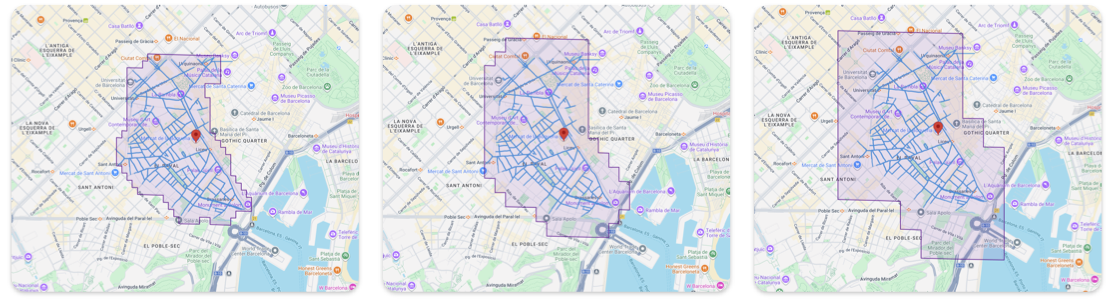
高、中、低多边形保真度
enable_smoothing:控制是否将保真度定义的网格单元格的尖锐边缘圆角化。false(原始):默认值。返回精确的几何计算结果。 边缘呈锯齿状或阶梯状。最适合需要高分析准确度的场景,例如严格的“点在多边形内”测试。延迟时间比平滑处理后更短。true(平滑):应用后处理算法来使边角变圆。最适合在地图上直观显示。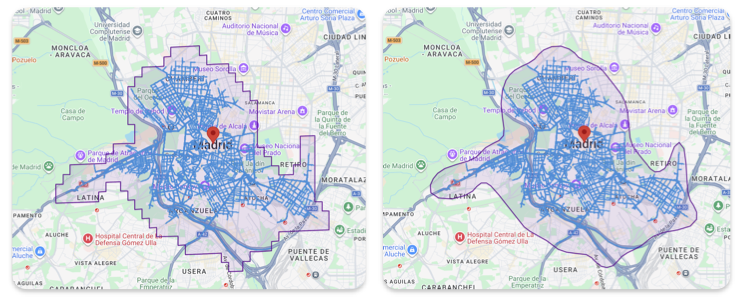
带平滑和不带平滑的等时线