
Para generar una isócrona, proporciona a la API un origen, un medio de transporte, como automóvil, bicicleta o a pie, y un límite de tiempo. También puedes ajustar las preferencias de la ruta y la apariencia visual del polígono resultante.
Horizonte temporal
La restricción principal que proporcionas al servicio es travel_duration. Esto define el horizonte temporal para el cálculo.
- Duración máxima: La API admite una duración del viaje máxima de 3,600 segundos (1 hora) para el modo
DRIVEy de 7,200 segundos (2 horas) para los modosWALKyBICYCLE. - Rendimiento: El tiempo de cálculo se ajusta según la duración solicitada y el modo de viaje seleccionado. Un isócrono de una hora en automóvil abarca un área geográfica y una red de rutas significativamente más grandes que un isócrono de una hora a pie, lo que genera una mayor latencia para la solicitud de conducción.
- Formato: Debido a que la API usa
google.protobuf.Duration, la duración debe tener el formato de una cadena que termine en una "s" (por ejemplo,"3600s"), en lugar de un número entero.
Puntos de origen y ajuste a la ruta
Puedes especificar el punto de partida de la isócrona de dos maneras:
- Coordenadas: Un par de latitud y longitud (
location). - IDs de lugar: Es un identificador único para un lugar específico en Google Maps (
place). Cuando proporcionas un ID de lugar, el servicio usa el centroide de ese lugar como punto de origen. Ten en cuenta que la API espera el formato del nombre del recurso, comoplaces/ChIJ.... Para obtener más información sobre los IDs de lugar, consulta IDs de lugar.
Independientemente del método de entrada, la API no calcula los tiempos de viaje desde el punto físico exacto si este no se encuentra en una ruta, como dentro de un parque o un edificio. Para controlar esta situación, el servicio usa el ajuste a la ruta. El ajuste a la ruta tiene las siguientes características:
- Ajuste inteligente: El servicio intenta ajustar tu punto de origen al tramo de ruta transitable más cercano.
- Conocimiento del modo: La lógica de ajuste considera tu
travel_mode. Si solicitasDRIVE, la API ignora los senderos solo para peatones y busca la calle apta para vehículos más cercana. Si solicitasWALK, la API prioriza las rutas peatonales y las veredas. - Casos de falla: Si la API no puede encontrar un tramo de ruta adecuado a aproximadamente 100 metros de tu punto de partida, devuelve un error
404 NOT_FOUND. Por lo general, esto indica que el punto está demasiado lejos de la red vial o en un área en la que los datos del mapa no admiten el modo de viaje solicitado.
Dirección del viaje (de entrada o de salida)
Puedes calcular la accesibilidad entrante y saliente con el parámetro travelDirection:
FROM(saliente): Calcula el área a la que se puede llegar desde el punto de origen dentro del límite de tiempo especificado. Esto es adecuado para casos de uso como zonas de entrega o cobertura de servicio.TO(entrante): Calcula el área desde la que puedes viajar hacia el punto de origen dentro del límite de tiempo especificado. Esto es adecuado para determinar zonas de captación, como los lugares desde los que los empleados pueden viajar para llegar a una oficina central.
Conciencia del tráfico
Controla cómo los datos de tráfico influyen en el polígono generado con el parámetro routing_preference:
TRAFFIC_UNAWARE(predeterminado): Usa los límites de velocidad y la jerarquía de rutas para generar el polígono de isócrona. Esto produce una forma determinística que no fluctúa según la hora del día. Este parámetro es ideal para el análisis general o la planificación de situaciones de referencia.TRAFFIC_AWARE: Calcula isócronas con las condiciones de tráfico en tiempo real o predictivas en el momento de la solicitud, lo que hace que el área alcanzable se reduzca durante la congestión y se expanda durante las horas no pico. Nota: El enrutamiento que tiene en cuenta el tráfico solo se admite cuandotravelModese establece enDRIVE.
Suavizado y fidelidad
Puedes personalizar la apariencia y la precisión de los polígonos de salida con los parámetros polygon_fidelity y enable_smoothing. Si bien estas opciones son independientes, funcionan en conjunto para determinar la forma final.
polygon_fidelity: Controla el tamaño de las celdas de la cuadrícula subyacente que se usan para calcular el área alcanzable.LOW: Usa celdas de cuadrícula más grandes. Es la mejor opción para cubrir áreas grandes sin espacios, lo que genera una forma generalizada.MEDIUM: Precisión equilibrada.HIGH: Usa celdas de cuadrícula más pequeñas. Genera un ajuste más preciso a la red vial, pero puede producir áreas vacías o agujeros si la red vial es dispersa.POLYGON_FIDELITY_UNSPECIFIED: Si no se especifica, el servicio selecciona de forma dinámica la fidelidad según la duración del viaje solicitada.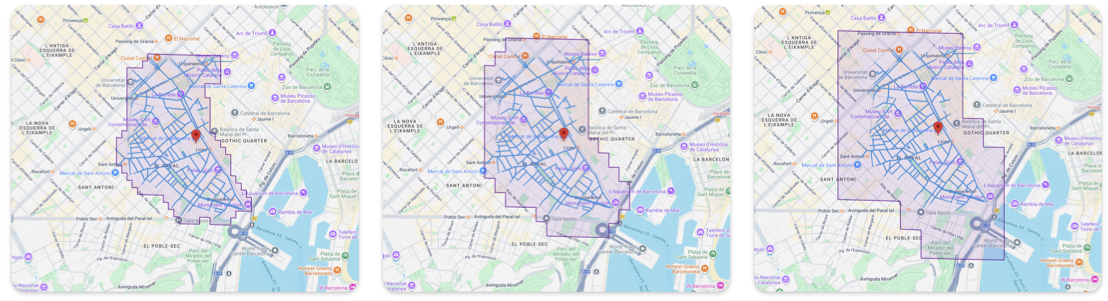
Fidelidad de polígonos alta, media y baja
enable_smoothing: Controla si los bordes definidos por la fidelidad se redondean.false(sin procesar): Es el valor predeterminado. Devuelve el cálculo geométrico exacto. Los bordes aparecen irregulares o escalonados. Ideal para la precisión analítica, como las pruebas estrictas de punto en polígono. Menor latencia que la latencia suavizada.true(Suavizado): Aplica un algoritmo de posprocesamiento para redondear las esquinas. Es la mejor opción para la visualización en mapas.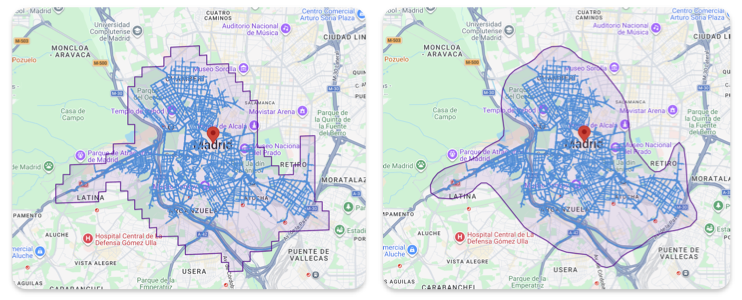
Isócrona con y sin suavizado