- เจ้าของแคตตาล็อก
- Nature Trace
- ความพร้อมใช้งานของชุดข้อมูล
- 2018-01-01T00:00:00Z–2020-12-31T23:59:59Z
- ผู้ผลิตชุดข้อมูล
- แท็ก
คำอธิบาย
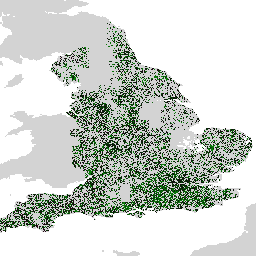
ชุดข้อมูล Farmscapes 2020 มีแผนที่ความน่าจะเป็นความละเอียดสูง (25 ซม.) สำหรับฟีเจอร์กึ่งธรรมชาติที่สำคัญ 3 รายการภายในภูมิทัศน์ทางการเกษตรของอังกฤษ ได้แก่ แนวพุ่มไม้ ป่าไม้ และกำแพงหิน ชุดข้อมูลนี้ได้รับการพัฒนาขึ้นโดยความร่วมมือกับ Leverhulme Centre for Nature Recovery ที่ Oxford เพื่อใช้เป็นข้อมูลพื้นฐานสำหรับการใช้งานต่างๆ รวมถึงการฟื้นฟูภูมิทัศน์ การตรวจสอบความหลากหลายทางชีวภาพ และการวิเคราะห์การเชื่อมต่อทางนิเวศวิทยา
ชุดข้อมูลนี้สร้างขึ้นโดยใช้โมเดล Vision Transformer กับภาพถ่ายทางอากาศความละเอียดสูงแบบโมเสก ซึ่งได้รับการฝึกโดยใช้คลังข้อมูลขนาดใหญ่ที่มีป้ายกำกับที่สร้างโดยมนุษย์ เอาต์พุตประกอบด้วยเลเยอร์ความน่าจะเป็นที่แตกต่างกัน 3 เลเยอร์ โดยเลเยอร์ละ 1 คลาสฟีเจอร์ รูปแบบความน่าจะเป็นนี้ช่วยให้ผู้ใช้ใช้เกณฑ์ที่กำหนดเองเพื่อสร้างแผนที่ฟีเจอร์แบบไบนารีที่ปรับให้เหมาะกับข้อกำหนดในการวิเคราะห์เฉพาะของตนได้
ข้อจำกัด
- ขอบเขตทางภูมิศาสตร์: ประสิทธิภาพของโมเดลลดลงในสภาพแวดล้อมในเมืองที่มีความหนาแน่นสูงและพื้นที่ภูเขา ซึ่งมีข้อมูลไม่เพียงพอในข้อมูลฝึกฝนที่เน้นภูมิทัศน์ในชนบทเป็นหลัก
- ความถูกต้องของเวลา: ภาพต้นฉบับถูกถ่ายระหว่างปี 2018 ถึง 2020 ดังนั้น ชุดข้อมูลจึงไม่ได้คำนึงถึงการเปลี่ยนแปลงของภูมิทัศน์ที่เกิดขึ้นตั้งแต่ช่วงเวลานี้
- ประสิทธิภาพเฉพาะคลาส: คลาสกำแพงหินมีความถูกต้องต่ำกว่าคลาสป่าไม้และแนวพุ่มไม้ ซึ่งเป็นผลมาจากการไม่สมดุลของคลาสอย่างมากในข้อมูลการฝึก
ชุดข้อมูลยุโรป
นอกจากชุดข้อมูลหลักสำหรับอังกฤษแล้ว เรายังได้สร้างชุดข้อมูลเวอร์ชันเบื้องต้นในระดับยุโรปด้วย ชุดข้อมูลนี้ยังไม่ได้รับการตรวจสอบเชิงปริมาณแบบเดียวกันและควรพิจารณาว่าเป็นชุดข้อมูลทดลอง คุณสามารถขอสิทธิ์เข้าถึงชุดข้อมูลนี้ได้โดยส่ง แบบฟอร์มนี้
ย่านความถี่
ย่านความถี่
ขนาดพิกเซล: 0.25 เมตร (ทุกย่านความถี่)
| ชื่อ | ต่ำสุด | สูงสุด | สเกล | ขนาดพิกเซล | คำอธิบาย |
|---|---|---|---|---|---|
B0 |
0 | 250 | 0.004 | 0.25 เมตร | ความน่าจะเป็นของแนวพุ่มไม้ (ปรับสเกลเป็น [0-250]) |
B1 |
0 | 250 | 0.004 | 0.25 เมตร | ความน่าจะเป็นของกำแพงหิน (ปรับสเกลเป็น [0-250]) |
B2 |
0 | 250 | 0.004 | 0.25 เมตร | ความน่าจะเป็นของป่าไม้/ต้นไม้ (ปรับสเกลเป็น [0-250]) |
ข้อกำหนดในการใช้งาน
ข้อกำหนดในการใช้งาน
ชุดข้อมูลนี้ได้รับอนุญาตภายใต้ CC-BY 4.0 และต้องมีการระบุแหล่งที่มาดังนี้ "ชุดข้อมูลนี้ผลิตโดย Google"
การอ้างอิง
Michelangelo Conserva, Alex Wilson, Charlotte Stanton, Vishal Batchu, Varun Gulshan , "Mapping Farmed Landscapes from Remote Sensing" (อยู่ระหว่างการตรวจสอบ) doi:10.48550/arXiv.2506.13993,
สำรวจด้วย Earth Engine
ตัวแก้ไขโค้ด (JavaScript)
var farmscapes = ee.ImageCollection('projects/nature-trace/assets/farmscapes/england_v1_0') .mosaic(); Map.addLayer(farmscapes, {}, 'Raw probs', false); var stone_wall = farmscapes.select(['B1']); stone_wall = stone_wall.updateMask(stone_wall.gt(250 / 4)); Map.addLayer( stone_wall, {palette: ['FFFFFF', '00FFFF'], min: 0, max: 250}, 'Stone wall'); var hedgerow = farmscapes.select(['B0']); hedgerow = hedgerow.updateMask(hedgerow.gt(250 / 4)); Map.addLayer( hedgerow, {palette: ['FFFFFF', 'c71585'], min: 0, max: 250}, 'Hedgerow'); var woodland = farmscapes.select(['B2']); woodland = woodland.updateMask(woodland.gt(250 / 4)); Map.addLayer( woodland, {palette: ['FFFFFF', '06402B'], min: 0, max: 250}, 'Woodland'); var lon = -1.43; var lat = 52.973; Map.setCenter(lon, lat, 15);