- 目录所有者
- Land &Carbon Lab
- 数据集可用时间
- 2001-01-01T00:00:00Z–2026-01-01T00:00:00Z
- 数据集生产者
- World Resources Institute Google DeepMind
- 联系人
- Land &Carbon Lab
- 标签
说明
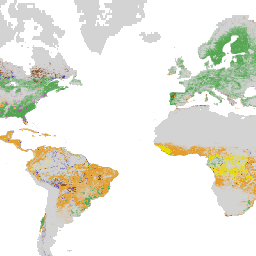
此数据集以 1 公里的分辨率绘制了 2001-2025 年全球树木覆盖率损失的主要驱动因素。这些数据由世界资源研究所 (WRI) 和 Google DeepMind 制作,是使用 全球神经网络模型 (ResNet) 开发的,该模型使用通过对超高分辨率卫星图像进行视觉 解读而收集的一组样本进行训练。该模型使用卫星图像 (Landsat 7 和 8、Sentinel-2)和辅助数据对七个驱动因素类别进行分类: 永久农业、耐用商品、轮耕、伐木、野火、 定居点和基础设施,以及其他自然干扰。通过解读超高分辨率卫星图像收集的独立分层随机样本用于估计地图的准确性。
__驱动因素定义为树木覆盖率损失的直接原因,可能包括临时 干扰(自然或人为)或因改变为 非森林土地用途(例如,森林砍伐)而导致的树木覆盖率永久损失。__主要驱动因素定义为在整个时间段内导致每个 1 公里单元格内大部分树木覆盖率损失的直接驱动因素。类别定义如下:
- 永久农业:长期、永久的树木覆盖率损失,用于小型到大型农业。这包括多年生树木作物,以及牧场和季节性作物和种植系统, 其中可能包括休耕期。如果树木覆盖损失事件发生后有明显证据表明农业活动持续存在,并且不属于临时耕作周期的一部分,则农业活动被视为“永久性”活动。
- 耐用商品:因建立或扩建采矿或能源基础设施而造成的损失。
- 轮耕:因小型到中型清理而造成的树木覆盖率损失,用于临时耕作,随后被废弃,然后重新生长次生林或植被。
- 伐木:在人工管理的天然林或半天然林和人工林中发生的森林管理和伐木活动,通常有证据表明在随后的几年中森林重新生长或种植。 包括皆伐和选择性伐木、伐木道路的建立、森林疏伐以及 打捞或卫生伐木。
- 野火:因火灾造成的树木覆盖率损失,之后没有明显的人为转换或农业活动。火灾可能是自然原因(例如闪电)引起的,也可能与人类 活动(意外或故意)有关。
- 定居点和基础设施:因道路、 定居点、城市地区或建筑基础设施(与其他类别无关)的扩张和集约化而造成的树木覆盖率损失。
- 其他自然干扰:因其他非火灾自然干扰 (例如山体滑坡、虫害爆发、河流蜿蜒)而造成的树木覆盖率损失。如果因自然原因造成的损失随后进行 打捞或卫生伐木,则归类为伐木。
限制:此产品无法区分天然林和人工 林(例如人工林、树木作物或农林复合系统)的损失。虽然与 __永久农业、__耐用商品和__定居点和基础设施类别相关的树木覆盖率损失非常接近森林砍伐(将森林永久转换为其他土地用途),但这些 类别有时可能包括清理人工林。例如,清理和重新种植 果园将包含在永久农业类别中,但不是天然林的森林砍伐。 同样,将天然林替换为木纤维人工林与 2000 年之前建立的现有人工林中的常规 采伐无法区分,因为这两者都包含在伐木 类别中。
此产品显示了整个期间内每个 1 公里单元格中的主要驱动因素。如果多个驱动因素以较小的规模出现在同一单元格中,则不会显示 多个驱动因素,如果多个驱动因素在期间内不同时间出现,也不会详细说明 驱动因素的顺序。此外,这些数据的范围仅限于将驱动因素归因于 Global Forest Change v1.13 树木覆盖率损失产品绘制的树木覆盖率损失, 因此损失的检测受该产品准确率的影响。
如需查看方法、技术规范、定义、准确性和 限制的完整说明,请参阅出版物: https://doi.org/10.1088/1748-9326/add606。您还可以在 Zenodo 和 WRI Data Explorer 上下载这些数据。
频段
频段
像素大小:1111.95 米(所有频段)
| 名称 | 最小值 | 全速 | 缩放系数 | 像素尺寸 | 说明 |
|---|---|---|---|---|---|
classification |
1 | 7 | 1111.95 米 | 基于原始概率的最可能类别。 |
|
probability_1 |
0 | 250 | 0.004 | 1111.95 米 | “永久农业”类别的概率(缩放至 [0-250])。 |
probability_2 |
0 | 250 | 0.004 | 1111.95 米 | “耐用商品”类别的概率(缩放至 [0-250])。 |
probability_3 |
0 | 250 | 0.004 | 1111.95 米 | “轮耕”类别的概率(缩放至 [0-250])。 |
probability_4 |
0 | 250 | 0.004 | 1111.95 米 | “伐木”类别的概率(缩放至 [0-250])。 |
probability_5 |
0 | 250 | 0.004 | 1111.95 米 | “野火”类别的概率(缩放至 [0-250])。 |
probability_6 |
0 | 250 | 0.004 | 1111.95 米 | “定居点和基础设施”类别的概率(缩放至 [0-250])。 |
probability_7 |
0 | 250 | 0.004 | 1111.95 米 | “其他自然干扰”类别的概率(缩放至 [0-250])。 |
classification 类别表
| 值 | 颜色 | 说明 |
|---|---|---|
| 1 | #E39D29 | 永久农业 |
| 2 | #E58074 | 耐用商品 |
| 3 | #E9D700 | 轮耕 |
| 4 | #51A44E | 伐木 |
| 5 | #895128 | Wildfire |
| 6 | #A354A0 | 定居点和基础设施 |
| 7 | #3A209A | 其他自然干扰 |
使用条款
使用条款
引用
Sims, M.J.,R. Stanimirova,A. Raichuk,M. Neumann,J. Richter,F. Follett, J. MacCarthy,K. Lister,C. Randle,L. Sloat,E. Esipova,J. Jupiter,C. Stanton, D. Morris,C.M. Slay,D. Purves,和 N. Harris。2025 年。 “Global Drivers of Forest Loss at 1 Km Resolution.” Environmental Research Letters 20 (7): 074027. doi:10.1088/1748-9326/add606
通过 Earth Engine 探索
代码编辑器 (JavaScript)
Map.setCenter(-9.22,20.65,3) var drivers = ee.Image('projects/landandcarbon/assets/wri_gdm_drivers_forest_loss_1km/v1_3_2001_2025'); var drivers_class = drivers.select(['classification']); var vis = { "min":1, "max": 7, "palette": ['E39D29','E58074','e9d700','51a44e','895128','a354a0','3a209a'] }; Map.addLayer(drivers_class, vis, 'Drivers of Forest Loss, 2001-2025'); var permAg_prob = drivers.select(['probability_1']); //Select a probability band var probVis = { min: 0, max: 250, palette: ['#440154','#481567','#482677','#453781','#3b528b','#2c728e','#21908d','#27ad81','#5ec962','#aadc32','#fde725'] }; Map.addLayer(permAg_prob, probVis, 'Probability band for permanent agriculture', false);