
Eşzaman eğrisi oluşturmak için API'ye bir başlangıç noktası, ulaşım şekli (ör. araba, bisiklet veya yaya) ve zaman sınırı sağlayın. Ayrıca yönlendirme tercihlerini ve ortaya çıkan poligonun görsel görünümünü de ayarlayabilirsiniz.
Zaman ufku
Hizmete sağladığınız birincil kısıtlama travel_duration'dır. Bu, hesaplamanın zaman aralığını tanımlar.
- Maksimum süre: API,
DRIVEmodu için maksimum 3.600 saniye (1 saat),WALKveBICYCLEmodları için ise 7.200 saniye (2 saat) seyahat süresini destekler. - Performans: Hesaplama süresi, istenen süreye ve seçilen seyahat şekline göre değişir. Bir saatlik sürüş izokronu, bir saatlik yürüme izokronuna kıyasla önemli ölçüde daha geniş bir coğrafi alanı ve yol ağını kapsar. Bu durum, sürüş isteğinde daha yüksek gecikmeye neden olur.
- Biçimlendirme: API,
google.protobuf.Durationkullandığından süre, tam sayı yerine "s" ile biten bir dize olarak biçimlendirilmelidir (örneğin,"3600s").
Başlangıç noktaları ve yola tutturma
İzokronun başlangıç noktasını iki şekilde belirtebilirsiniz:
- Koordinatlar: Enlem ve boylam çifti (
location). - Yer kimlikleri: Google Haritalar'daki belirli bir yerin benzersiz tanımlayıcısıdır (
place). Bir yer kimliği sağladığınızda hizmet, başlangıç noktası olarak söz konusu yerin ağırlık merkezini kullanır. API'nin, kaynak adınınplaces/ChIJ...gibi bir biçimde olmasını beklediğini unutmayın. Yer kimlikleri hakkında daha fazla bilgi için Yer kimlikleri başlıklı makaleyi inceleyin.
Giriş yönteminden bağımsız olarak, API, yol üzerinde olmayan (ör. park veya bina içinde) noktaların seyahat sürelerini tam olarak hesaplamaz. Hizmet, bu durumu ele almak için yol tutturma özelliğini kullanır. Yola tutturma özelliği aşağıdaki özellikleri içerir:
- Akıllı tutturma: Hizmet, başlangıç noktanızı en yakın geçilebilir yol segmentine tutturmaya çalışır.
- Mod farkındalığı: Sabitleme mantığı,
travel_modedikkate alır.DRIVEisteğinde bulunursanız API, yalnızca yayalara açık yolları yoksayar ve en yakın sürüşe uygun sokağı arar.WALKisteğinde bulunursanız API, yürünebilir yollara ve kaldırımlara öncelik verir. - Hata durumları: API, başlangıç noktanızın yaklaşık 100 metre yakınında uygun bir yol segmenti bulamazsa
404 NOT_FOUNDhatası döndürür. Bu durum genellikle noktanın yol ağından çok uzak olduğunu veya harita verilerinin istenen seyahat modunu desteklemediği bir bölgede olduğunu gösterir.
Seyahat yönü (Gelen ve Giden)
travelDirection parametresini kullanarak hem gelen hem de giden erişilebilirliği hesaplayabilirsiniz:
FROM(Giden): Belirtilen süre içinde başlangıç noktasından ulaşılabilen alanı hesaplar. Bu, teslimat bölgeleri veya hizmet kapsamı gibi kullanım alanları için uygundur.TO(Gelen): Belirtilen süre içinde başlangıç noktasına gitmek için seyahat edebileceğiniz alanı hesaplar. Bu, çalışanların merkezi bir ofise ulaşmak için nereden gidip gelebileceği gibi hizmet alanlarını belirlemek için uygundur.
Trafik farkındalığı
Trafik verilerinin oluşturulan poligonu nasıl etkileyeceğini routing_preference parametresiyle kontrol edin:
TRAFFIC_UNAWARE(Varsayılan): Eşzamanlılık poligonunu oluşturmak için hız sınırlarını ve yol hiyerarşisini kullanır. Bu, günün saatine göre değişmeyen deterministik bir şekil oluşturur. Bu parametre, genel analiz veya temel senaryo planlaması için idealdir.TRAFFIC_AWARE: İsteğin yapıldığı sırada canlı veya tahmini trafik koşullarını kullanarak izokronlar hesaplar. Bu nedenle, ulaşılabilir alan trafik yoğunluğu sırasında küçülür, yoğun olmayan saatlerde ise genişler. Not: Trafiğe duyarlı yönlendirme yalnızcatravelModeDRIVEolarak ayarlandığında desteklenir.
Düzeltme ve doğruluk
polygon_fidelity ve enable_smoothing parametrelerini kullanarak çıkış poligonlarının görünümünü ve hassasiyetini özelleştirebilirsiniz. Bu seçenekler birbirinden bağımsız olsa da son şekli belirlemek için birlikte çalışır.
polygon_fidelity: Ulaşılabilir alanı hesaplamak için kullanılan temel ızgara hücrelerinin boyutunu kontrol eder.LOW: Daha büyük ızgara hücreleri kullanır. Boşluk bırakmadan geniş alanları kapsamak için idealdir. Bu sayede genel bir şekil elde edilir.MEDIUM: Dengeli hassasiyet.HIGH: Daha küçük ızgara hücreleri kullanır. Yol ağına daha iyi oturur ancak yol ağı seyrekse boş alanlar veya delikler oluşturabilir.POLYGON_FIDELITY_UNSPECIFIED: Belirtilmemişse hizmet, istenen seyahat süresine göre doğruluğu dinamik olarak seçer.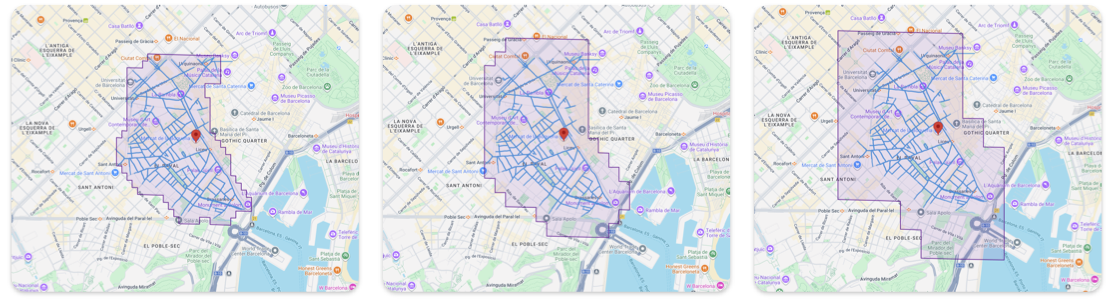
Yüksek, orta ve düşük poligon doğruluğu
enable_smoothing: Doğruluk tarafından tanımlanan ızgara hücrelerinin keskin kenarlarının yuvarlatılıp yuvarlatılmayacağını kontrol eder.false(Ham): Varsayılan. Tam geometrik hesaplamayı döndürür. Kenarlar tırtıklı veya kademeli görünüyor. Sıkı nokta-çokgen testleri gibi analitik doğruluk için en iyisidir. Düzeltilmişten daha düşük gecikme süresi.true(Düzleştirilmiş): Köşeleri yuvarlamak için işleme sonrası algoritma uygular. Haritalarda görsel görüntüleme için en uygun seçenektir.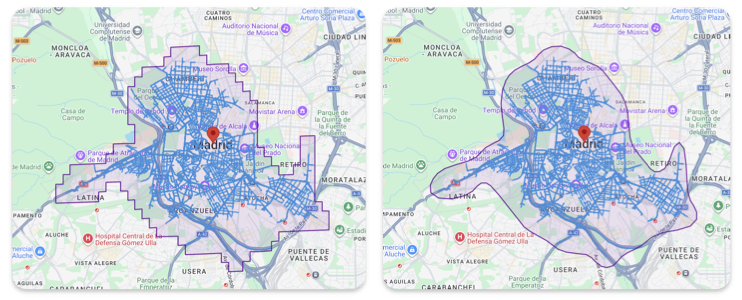
Düzleştirme ile ve düzleştirme olmadan izokron