
Per generare un'isocrona, fornisci all'API un'origine, una modalità di viaggio come auto, bicicletta o a piedi e un limite di tempo. Puoi anche regolare le preferenze di routing e l'aspetto visivo del poligono risultante.
Orizzonte temporale
Il vincolo principale che fornisci al servizio è travel_duration. Questo
definisce l'orizzonte temporale per il calcolo.
- Durata massima:l'API supporta un tempo di percorrenza massimo di 3600 secondi
(1 ora) per la modalità
DRIVEe di 7200 secondi (2 ore) per le modalitàWALKeBICYCLE. - Rendimento:i tempi di calcolo variano in base alla durata richiesta e alla modalità di viaggio selezionata. Un isocrono di un'ora in auto copre un'area geografica e una rete stradale molto più grandi di un isocrono di un'ora a piedi, il che comporta una latenza maggiore per la richiesta di guida.
- Formattazione:poiché l'API utilizza
google.protobuf.Duration, la durata deve essere formattata come una stringa che termina con una "s" (ad esempio,"3600s") anziché come un numero intero.
Punti di origine e snapping stradale
Puoi specificare il punto di partenza dell'isocrona in due modi:
- Coordinate:una coppia di latitudine e longitudine (
location). - ID luogo:un identificatore univoco per un luogo specifico su Google Maps
(
place). Quando fornisci un ID luogo, il servizio utilizza il centroide di quel luogo come punto di origine. Tieni presente che l'API prevede il formato del nome della risorsa, ad esempioplaces/ChIJ.... Per saperne di più sugli ID luogo, consulta ID luogo.
Indipendentemente dal metodo di input, l'API non calcola i tempi di percorrenza dal punto fisico esatto se questo non si trova su una strada, ad esempio all'interno di un parco o di un edificio. Per gestire questa situazione, il servizio utilizza lo snapping stradale. L'aderenza alla strada ha le seguenti caratteristiche:
- Snap intelligente: il servizio tenta di allineare il punto di origine al segmento stradale percorribile più vicino.
- Rilevamento della modalità:la logica di snapping prende in considerazione la tua
travel_mode. Se richiediDRIVE, l'API ignora i percorsi solo pedonali e cerca la strada percorribile più vicina. Se richiediWALK, l'API dà la priorità a sentieri e marciapiedi percorribili a piedi. - Scenari di errore: se l'API non riesce a trovare un segmento stradale adatto entro
circa 100 metri dal punto di partenza, restituisce un errore
404 NOT_FOUND. Di solito, questo indica che il punto è troppo lontano dalla rete stradale o in un'area in cui i dati della mappa non supportano la modalità di viaggio richiesta.
Direzione di viaggio (in entrata o in uscita)
Puoi calcolare la raggiungibilità sia in entrata che in uscita utilizzando il parametro
travelDirection:
FROM(in uscita): calcola l'area raggiungibile da il punto di partenza entro il limite di tempo specificato. È adatto a casi d'uso come zone di consegna o copertura del servizio.TO(in entrata): calcola l'area da cui puoi raggiungere il punto di origine entro il limite di tempo specificato. È adatto per determinare le zone di bacino d'utenza, ad esempio da dove i dipendenti possono spostarsi per raggiungere un ufficio centrale.
Consapevolezza del traffico
Controlla in che modo i dati sul traffico influiscono sul poligono generato con il parametro
routing_preference:
TRAFFIC_UNAWARE(impostazione predefinita): utilizza i limiti di velocità e la gerarchia stradale per generare il poligono isocrono. In questo modo si ottiene una forma deterministica che non varia in base all'ora del giorno. Questo parametro è ideale per l'analisi generale o la pianificazione degli scenari di base.TRAFFIC_AWARE: calcola le isocrone utilizzando le condizioni del traffico in tempo reale o predittive al momento della richiesta, facendo sì che l'area raggiungibile si restringa durante la congestione e si espanda durante le ore non di punta. Nota:il routing in base al traffico è supportato solo quandotravelModeè impostato suDRIVE.
Levigatura e fedeltà
Puoi personalizzare l'aspetto e la precisione dei poligoni di output utilizzando i parametri
polygon_fidelity e enable_smoothing. Sebbene queste opzioni siano
indipendenti, lavorano insieme per determinare la forma finale.
polygon_fidelity: controlla le dimensioni delle celle della griglia sottostante utilizzate per calcolare l'area raggiungibile.LOW: utilizza celle della griglia più grandi. Ideale per coprire aree estese senza interruzioni, ottenendo una forma generalizzata.MEDIUM: precisione bilanciata.HIGH: utilizza celle della griglia più piccole. I risultati si adattano meglio alla rete stradale, ma possono produrre aree vuote o buchi se la rete stradale è rada.POLYGON_FIDELITY_UNSPECIFIED: se non specificato, il servizio seleziona dinamicamente la fedeltà in base alla durata del viaggio richiesta.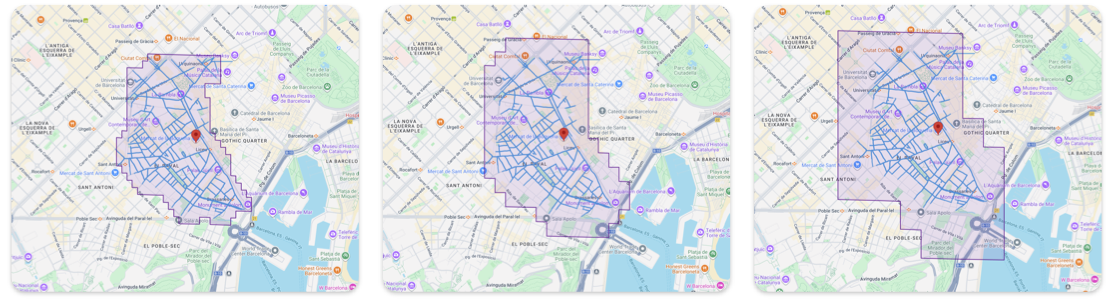
Fedeltà dei poligoni alta, media e bassa
enable_smoothing: controlla se gli angoli vivi delle celle della griglia definiti dalla fedeltà vengono arrotondati.false(grezzo): l'impostazione predefinita. Restituisce il calcolo geometrico esatto. I bordi appaiono frastagliati o a gradoni. Ideale per l'accuratezza analitica, ad esempio test rigorosi punto nel poligono. Latenza inferiore rispetto a quella smussata.true(levigato): applica un algoritmo di post-elaborazione per arrotondare gli angoli. Ideale per la visualizzazione visiva sulle mappe.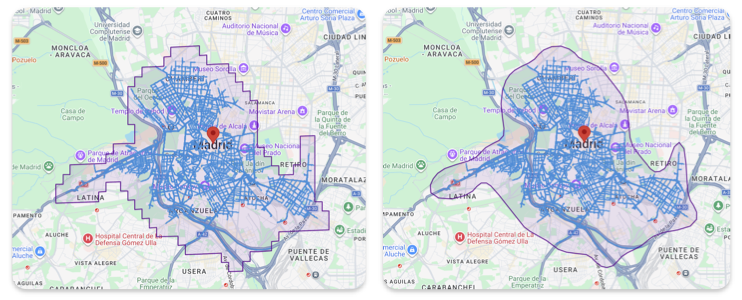
Isocrono con smoothing e senza