简介
为了支持巴西政府实施《巴西森林法典》并保护私人土地上的森林,Google 制作了两张基于 SPOT 卫星观测数据的基础地图:一张是视觉基本地图,另一张是分析基本地图 (G-BFID v1.0)。
这些镶嵌图像产品确立了 2008 年 7 月 22 日的基准,这是《巴西森林法典》中的一个关键日期,用于识别“整合区域”(预先存在人类居住或农业用途的区域)。这些镶嵌数据集源自 SPOT 卫星归档数据,可提供比传统上用于建立此基准的 30 米 Landsat 数据更高的分辨率。
为了将数千张 SPOT 图像合成统一的基本地图,这些图像经过了以下处理流程:
- 边缘优化,用于移除压缩伪影。
- 针对 Landsat 基准的辐射归一化。
- 云掩盖(保守、手动)。
- 配准误差校正(与 Landsat 复合影像进行共同配准)。
对于最终合成,我们采用了确定性镶嵌方法,而不是统计缩减。像素根据空间分辨率和卫星任务时间顺序分层,优先考虑来自较新卫星的观测结果。此分层结构与最近邻重采样相结合,可建立严格的数据来源。因此,最终基本地图中的每个像素都保留了其离散来源,并且可以直接追溯到特定的源观测及其元数据。
源数据
卫星和传感器规格
G-BFID v1.0 基本地图源自 SPOT(地球观测卫星)图像数据。SPOT 任务由 CNES 运营,由 Airbus 分发,可提供 60 公里幅宽的高分辨率光学图像。该项目利用了三颗特定卫星的影像归档来确定 2008 年的基准:
- SPOT 2 和 4:配备 HRV/HRVIR 传感器,可提供分辨率为 20 米的多光谱数据和分辨率为 10 米的全色数据。
- SPOT 5:配备 HRG 传感器,可提供显著改进的空间分辨率,其中多光谱数据的分辨率为 10 米,全色数据的分辨率为 5 米。
| SPOT 2 | SPOT 4 | SPOT 5 | |
|---|---|---|---|
| 多光谱 | 20 米 | 20 米 | 10 分钟 |
| 全色 | 10 分钟 | 10 分钟 | 5 米 |
| 光谱频段 | 绿、红、近红外 | 绿光、红光、近红外 (NIR)、短波红外 (SWIR) | 绿光、红光、近红外 (NIR)、短波红外 (SWIR) |
表 1. SPOT 2、4 和 5 任务的技术规格。
注意:Airbus 生产了一种“超模式”全色产品,可用于对 SPOT 5 图像进行全色锐化,使其分辨率达到 2.5 米。这些数据对于此项目的规范而言非常有限,因此未纳入。
输入 Earth Engine 集合
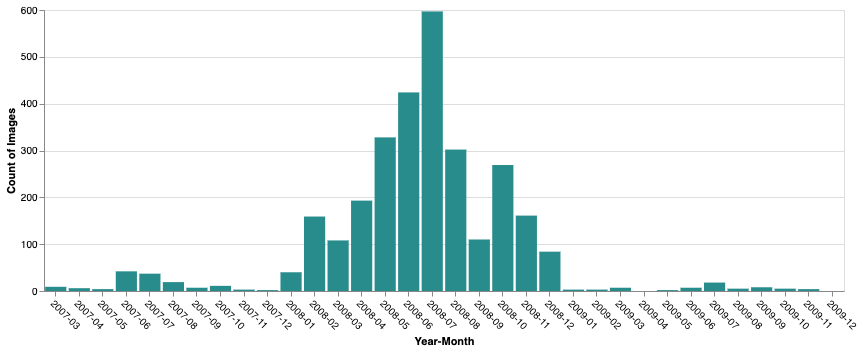
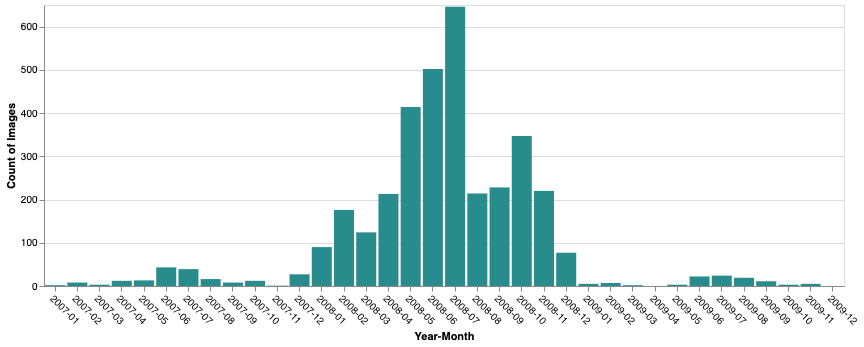
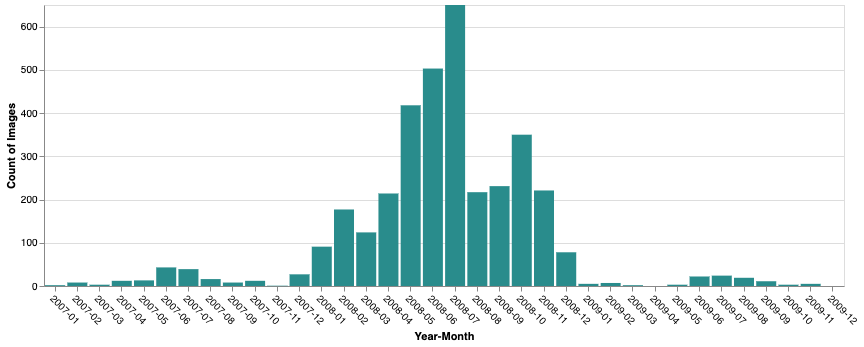
我们提取并处理了三种不同的 SPOT 数据产品,以生成最终的基础地图。这些集合涵盖了 2007 年 1 月 9 日至 2009 年 11 月 26 日期间,提供了必要的时间深度,可在克服云覆盖限制的同时保持高分辨率基准。
场景选择
为了支持在农村环境登记处 (CAR) 登记的私人土地上开展的森林保护工作,我们优先覆盖了亚马逊生物群系和“毁林弧”的五个州:马拉尼昂、马托格罗索、帕拉、朗多尼亚和托坎廷斯。
为了符合巴西《森林法》的要求,我们选择了 2008 年中期的时段。根据这些时间和云覆盖率(低于 50%)标准,我们从 SPOT 2、4 和 5 中确定了总共 10,072 张图片,并将这些图片提取到 Earth Engine Data Catalog 中以供处理。
关于光谱成分的注意事项: SPOT 2、4 和 5 传感器本身不捕获蓝色光谱带。对于自然色产品,数据分发商会提供合成的蓝波段(从现有光谱波段派生而来,用于近似表示真彩色)。
1. 全色锐化多光谱自然色
- Earth Engine 资源:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/PMS_NC/V1 - 图片数量:2977
- 日期范围:2007 年 3 月 1 日 - 2009 年 11 月 26 日
- 说明:此产品将较高分辨率的全色波段与多光谱波段合并,以生成清晰的三波段 RGB 图像。这是视觉基本地图的首选来源。
2. 多光谱自然色
- Earth Engine 资源:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS_NC/V1 - 图片数量:3536
- 日期范围:2007 年 1 月 9 日至 2009 年 11 月 26 日
- 说明:一种 3 波段伪自然色产品(模拟 RGB),具有原始多光谱分辨率。此集合在可视化底图中用作辅助来源,其中可能不提供全色锐化数据。
3. 多光谱
- Earth Engine 资源:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS/V1 - 图片数量:3559
- 日期范围:2007 年 1 月 9 日至 2009 年 11 月 26 日
- 说明:分析基本地图的来源。此集合包含计算植被指数(例如 NDVI)和执行地表覆盖分类所需的原始光谱波段(包括近红外和短波红外波段,如果可用)。
地理覆盖范围和缺口
G-BFID v1.0 基本地图的主要目标是为巴西的行政区域建立高分辨率的近 2008 年基准。 不过,在过滤掉高质量、低云覆盖率的图片的同时,严格保持时间窗口(2007 年至 2009 年)会导致出现空间缺口,尤其是在持续有云覆盖的地区。
场景选择和质量过滤
为确保数据完整性,我们确定了 2007 年至 2009 年间初始云覆盖率低于 50% 的候选池。在此基础上,我们总共提取了 10,000 多张图片,并进一步过滤掉存在严重质量问题的图片:
- 不连续性检查:排除包含人工识别的遥测或几何伪影的图片,包括数据提供商捆绑在一起的不连续场景。
- 云 QA:因完全被云层覆盖或其他原因而被专业图片分析师拒绝的场景。
- 数据密度:仅保留了云遮盖后有效像素占比超过 10%(视觉基本地图)或 5%(分析基本地图)的图片。
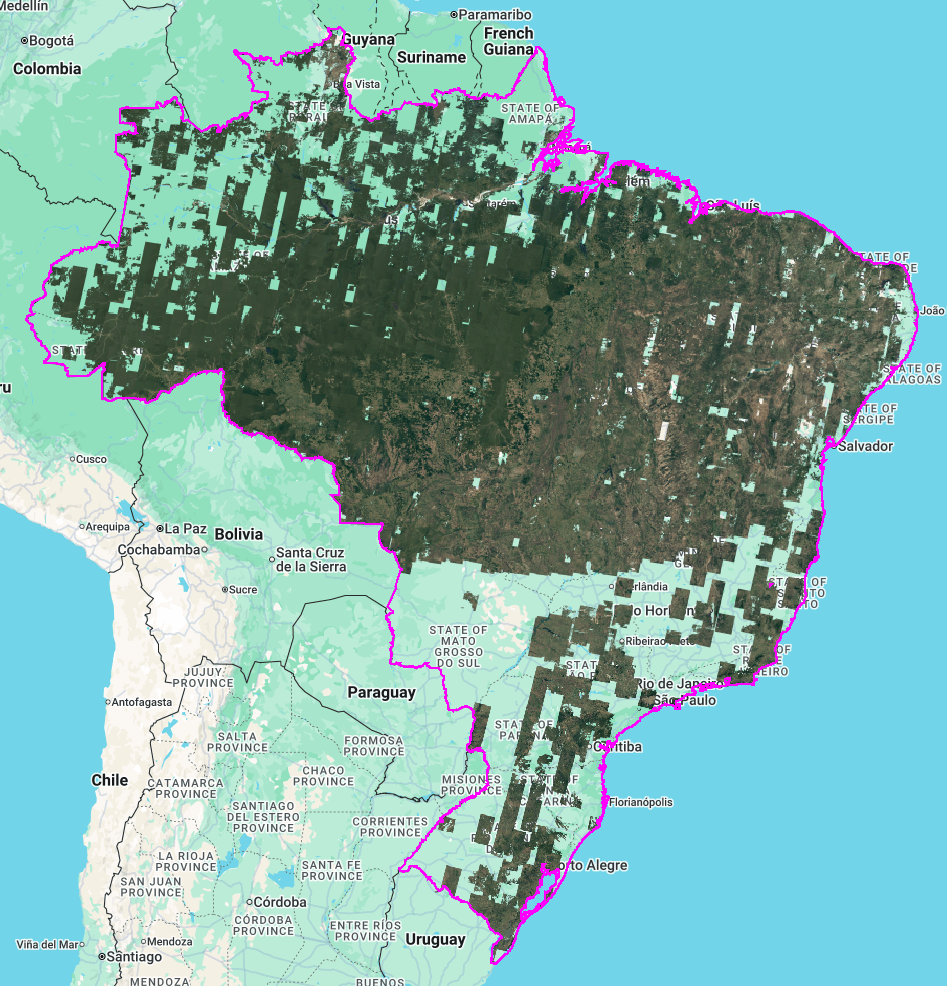
空间分布
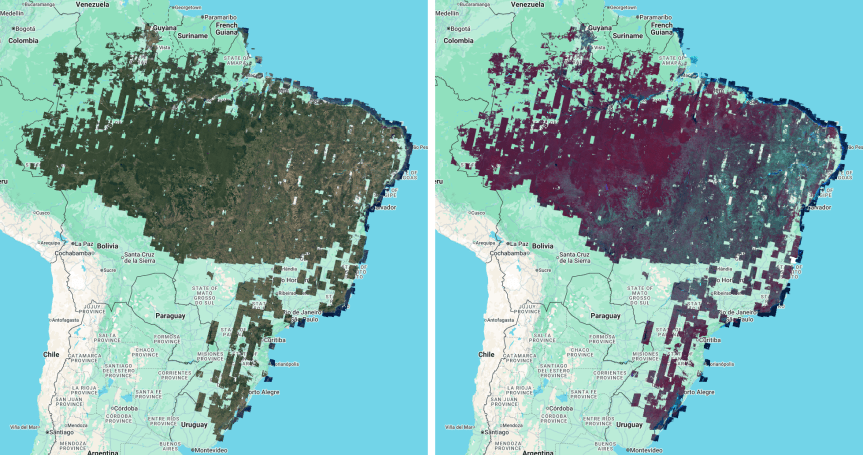
如图 5 所示,镶嵌图在“毁林弧”和中西部/北部地区实现了最高密度。透明区域表示在目标时间范围内,没有 SPOT 2、4 或 5 图像通过上述质量过滤条件,或者这些区域被云遮盖。
各州/省的覆盖范围
图 6 按州/省/直辖市/自治区细分了有效像素覆盖率。对于朗多尼亚和马托格罗索等州,覆盖率接近完整(超过 95%),而南部各州和东北部部分地区的密度较低,这是由于归档和云掩盖的限制。
该图表还显示,在几乎所有州,可视化底图提供的有效像素覆盖率始终略高于分析型底图。之所以存在这种差异,是因为 Visual 产品可以同时使用全色锐化和多光谱自然色影像集,而 Analytic 产品仅从多光谱影像集中派生而来。
处理方法
G-BFID v1.0 底图的处理方法优先考虑数据来源和辐射完整性,以支持森林法规遵从性评估。本部分首先定义了用于保持这种完整性的总体镶嵌架构和分层逻辑,然后介绍了在最终组装之前应用于各个源图像的按时间顺序进行的预处理和归一化步骤。
Mosaic 方法
最终的基础地图是使用镶嵌方法而非统计缩减器(例如平均值或中值合成)创建的。这种方法可确保最终产品保留源影像的原始光谱值和空间纹理。通过避免对多个观测结果进行平均,镶嵌可保留每个像素的离散来源。
分层逻辑
输入图像是分层叠加的,其层次结构优先考虑较高的空间分辨率和较新的卫星任务:
- 视觉基本地图:图像按像素大小(优先考虑最高分辨率的数据)排序,然后按卫星任务(优先考虑来自较新的 SPOT 卫星的数据)排序。
- 分析型基本地图:图像按卫星任务分层,优先考虑来自较晚 SPOT 任务的观测结果,以获得最佳可用数据。
完整性和可追溯性
重采样:所有内部重投影都使用最近邻重采样。这样可以避免其他方法的插值平滑效应,确保源像素的原始辐射和空间属性不受其邻近像素的影响。
数据可追溯性:两种产品中都包含每个像素的
date元数据波段。这样,用户就可以确定任何给定位置的确切观测日期,从而确保森林法规遵从性评估的完全透明。
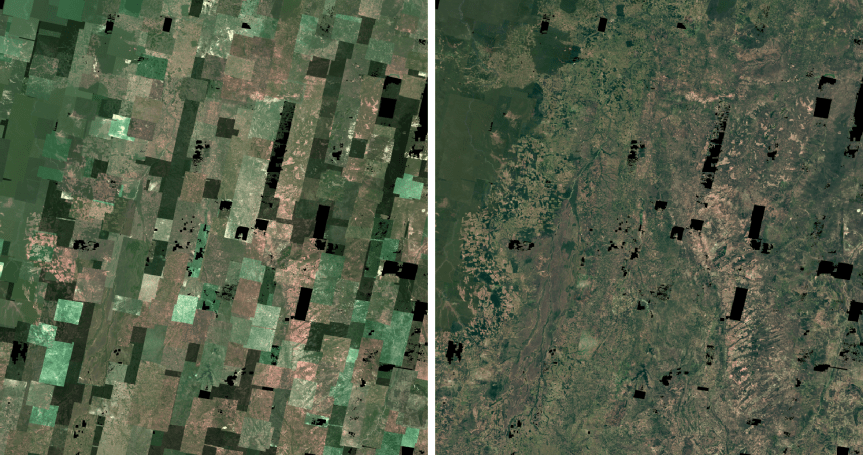
图片边缘优化
为了确保重叠场景之间的边界清晰,我们应用了边缘细化流程来移除源图像中存在的伪影。这些伪影表现为图像边界上出现斑点状或“噪点”像素,是提供方所提供数据中采用的有损压缩的特征。为解决此问题,我们对图片遮罩应用了 2.5 像素的焦点最小侵蚀,从而移除了低质量的边缘伪影,并确保最终拼接图中仅使用有效数据(图 7)。

云遮盖
为确保 G-BFID v1.0 的数据完整性达到尽可能高的水平,我们对整个影像归档实施了人工遮盖程序。之所以选择这种方法,而不是自动化方法,是为了更保守地排除受云或其他大气干扰影响的像素。
遮盖程序
经过训练的分析师会识别包含云和相关大气伪影的区域。为确保这些问题像素得到充分捕获,我们采用了一种保守的遮盖策略,该策略使用简化的粗略几何图形。我们没有精确描绘单个云的周界,而是遮盖了较大的矩形区域,以确保生成的镶嵌图像尽可能清晰。
虽然这种方法有意采用激进策略(经常会移除云旁边的有效像素),但我们认为,为了提供 2008 年基准的高完整性产品,这种做法是必要的。
遮盖政策和集成
人工遮罩仅针对多光谱和全色锐化自然色图像集生成。由于多光谱自然色产品源自多光谱数据,因此在处理过程中,这些掩码随后会传播到重合的多光谱图像。
任何没有匹配的手动遮罩自然色对应图像的多光谱图像均被排除在最终镶嵌图之外。这样可确保 G-BFID v1.0 套件中包含的每个像素(无论商品类型如何)都已去除云。
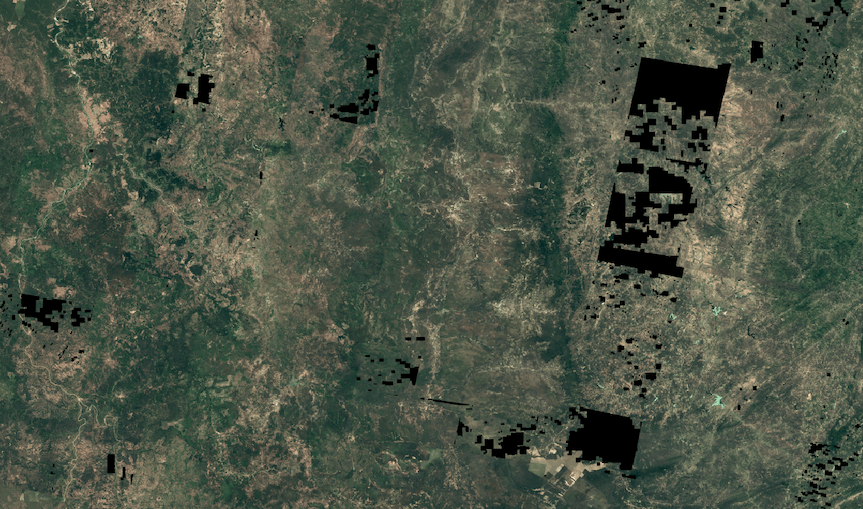
数据缺口的解读
最终拼接图中的透明间隙表示 2007 年至 2009 年时间范围内没有有效的优质数据。这些空白区域是多种因素共同造成的,包括上述保守的手动遮盖、最初拒绝云覆盖率较高的场景(>50%),或者提供方在特定区域完全没有可用的源图像。虽然较大的区域缺口通常反映了 2008 年前后影像的缺失,但图 9 中显示的明显“块状”图案是云掩盖的结果。
误注册更正
我们实施了自动化的共同配准工作流程,以缓解 SPOT 源影像相对于从 Landsat Collection 2 数据得出的地理基准的严重配准错误。
参考基准
生成了无云 Landsat Collection 2 参考镶嵌图,用作共同配准参考影像。此参考图片是使用 2006 年至 2010 年期间与巴西相交的 Landsat 7 和 8 影像的中值缩减器构建的。选择 Landsat 红波段作为主要配准目标,以匹配 SPOT 红波段。
位移估计
使用 ee.Image.displacement 算法计算 SPOT 源数据与 Landsat 参考数据之间的像素级偏移。
- 搜索参数:对位移模型应用了 500 米的最大偏移量和 5 的刚度参数。
- 统计汇总:使用平均值归约器在整个图像区域内汇总了 delta x ($dx$) 和 delta y ($dy$) 以及置信度值。
- 幅度计算:根据这些汇总统计信息,计算出总幅度偏移估计值 $M = \sqrt{dx^2 + dy^2}$,以表示场景的平均位移。
更正政策
根据计算出的位移统计信息对场景进行了分类和校正,以优先实现显著改进,同时避免引入新的伪影:
- 自动校正:对于位移量级 $M > 30$ 米且置信度得分 $C > 0.3$ 的图片,系统会使用估计的 $dx$ 和 $dy$ 值自动进行平移。
- 人工评估:对于估计位移非常大($M > 100$ 米)但置信度较低($C \le 0.3$)的场景,我们进行了人工审核。只有当校正后的共同注册效果明显优于原始位置时,我们才会接受校正。
- 排除:尝试校正后仍存在明显配准误差的场景,或特征不足以进行可靠匹配的场景,均被排除在镶嵌图之外。
实施和质量控制
使用最近邻重采样重新投影校正后的图像,以保留原始辐射值并避免双线性或三次插值的平滑效应。
为了确保空间可追溯性,我们在每张图片中附加了一个布尔值 coregistered 波段,并在最终镶嵌图中保留了该波段。借助此元数据,用户可以区分经过空间调整的像素和保留在原始交付位置的像素。
辐射归一化
为了考虑 SPOT 源集合中不同的天气条件和传感器差异,我们对构成镶嵌产品的图像应用了辐射归一化。视觉基准地图和分析基准地图都利用直方图匹配功能,以 2008 年 Landsat 目标基准为依据。
之所以选择 Landsat 作为参考,而不是 MODIS 等分辨率较低的替代方案,是因为其 30 米的分辨率与 5 到 20 米的 SPOT 数据更为接近。这种相似性可确保光谱直方图更具代表性,从而在匹配过程中实现更准确的辐射度转移。这种协调的具体方法会因最终用例是可视化还是分析而略有不同。
可视化基本地图
为了最大限度地减少相邻图像之间的辐射不连续性,并确保近乎无缝的外观,我们使用直方图匹配实现了一个色彩平衡工作流程。像素值经过调整,以匹配一致的 2008 年 Landsat 镶嵌目标基准。
该流程遵循以下步骤:
- 分析遮盖:为确保在直方图匹配期间获得稳定的统计信息,系统会生成临时分析遮盖,以排除可能会使数据出现偏差的区域。此遮盖功能主要针对以下两个功能:
- 变化较大的区域:排除绝对差值超过 SPOT 影像与 Landsat 参考镶嵌影像之间差值第 95 百分位的像素。
- 水体:使用 JRC 年度水体分类历史记录数据集排除水体上较高的反射率变异性。该数据集已过滤为 2008 年,并应用了反向掩码,以确保仅保留非水类别进行统计分析。
- 对照表 (LUT) 生成:使用掩码数据,计算源 SPOT 波段和目标 Landsat 波段的累积直方图。
- 插值:使用生成的 LUT 将源像素值重新映射到目标值,使 SPOT 数据的辐射度剖面与 2008 年 Landsat 参考数据保持一致。
分析型基础地图
处理分析型基本地图与处理可视化基本地图类似,但包括将 DN 值转换为大气层顶部反射率:
1. 大气表观 (TOA) 反射率转换
SPOT 原始数字量 (DN) 会转换为 TOA 反射率,以考虑物理传感器属性和太阳几何形状:
- 辐射度计算:应用提供商的特定于波段的物理增益和偏差元数据。
- 反射率归一化:辐射率根据太阳辐照度、太阳天顶角的余弦以及采集当天的日地距离进行归一化。
2. 直方图匹配
为了进一步最大限度地减少不同 SPOT 图像之间的辐射差异,我们应用了直方图匹配工作流程:
分析遮盖:此步骤使用与上文“可视化底图”部分中描述的完全相同的分析遮盖:排除变化百分位高于第 95 百分位的像素,并通过反转的 2008 年 JRC 分类掩码滤除水像素。
归一化:与视觉底图类似,像素值通过对照表重新映射,以使辐射剖面与 Landsat TOA 参考对齐。这有助于在整个镶嵌图范围内实现辐射一致性,从而训练大规模机器学习模型并运行可靠的推理。
限制和已知问题
虽然 G-BFID v1.0 提供了 2008 年的高分辨率基准,但用户应注意历史 SPOT 归档和所用处理方法固有的几项限制。
空间完整性和缺口
基础地图无法 100% 覆盖巴西的地理位置。在某些区域,没有影像符合项目严格的 2008 年时间窗口(2007 年至 2009 年)、云覆盖率阈值或质量标准,因此存在空白。在持续有云覆盖或历史卫星采集频率较低的地区,这些缺口最为常见。如需了解详情,请参阅地理覆盖范围和缺口部分。
可变原生分辨率
虽然最终产品的名义像素大小为 5 米(视觉)和 10 米(分析),但源影像包含 5 米、10 米和 20 米的原始像素。由于使用了最近邻重采样来保持光谱完整性,因此不同分辨率之间的边界可能会显示出来。

残余配准误差
尽管有自动化的共同配准工作流程,但某些区域可能仍存在空间偏移。残余配准误差最有可能出现在地形起伏较大的区域,或缺乏足够地标来计算高置信度位移向量的密集同质森林区域。
大气和云伪影
手动云掩盖流程有意采用保守而激进的方法,但并非详尽无遗。用户可能会偶尔遇到残留伪影,例如非常薄的卷云雾或小云阴影。
辐射不一致性和机器学习性能
虽然直方图匹配用于最大限度地减少辐射度不连续性,但相邻图像之间仍存在残余光谱变化。对于自动化地表覆盖分类或机器学习应用,这种可变性会增加整个镶嵌图中给定地表覆盖类型的光谱方差。这种更广泛的数据范围可能会降低推理期间的类别分离精度,从而可能导致更高的错误率。
光谱饱和度
在极亮区域(例如高反射率的城市表面、特定土壤类型或明亮的沙子)中,像素可能会达到传感器的最大可检测限值。这种“饱和”会导致这些特定位置的纹理和细节丢失。
更改后的波段比率和植被指数
为了实现近乎无缝的镶嵌,我们对每个光谱波段分别应用了直方图匹配,这会从根本上改变波段之间的原始物理比率。因此,计算 NDVI 等常见指数或其他波段比率指标会生成与未更改的源数据集不同的值。虽然这些派生指数可能仍能捕获整个拼接图中的相对空间模式,但不应将其用于绝对目的、跨传感器比较或依赖于严格指数阈值的分析。