Wprowadzenie
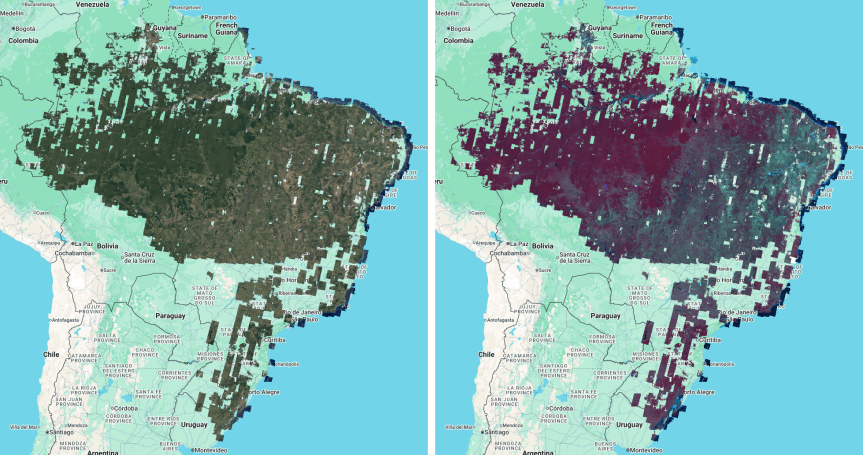
Aby wesprzeć działania rządu Brazylii na rzecz wdrożenia brazylijskiego kodeksu leśnego i ochrony lasów na terenach prywatnych, Google opracowało 2 mapy podstawowe na podstawie obserwacji satelitarnych SPOT: wizualną mapę podstawową i analityczną mapę podstawową (G-BFID w wersji 1.0).
Te mozaikowe produkty obrazowe stanowią punkt odniesienia dla daty 22 lipca 2008 r., która jest kluczowa w brazylijskim kodeksie leśnym do identyfikowania „obszarów skonsolidowanych”, czyli regionów, w których wcześniej istniały osady ludzkie lub które były wykorzystywane rolniczo. Te zbiory danych mozaikowych pochodzą z archiwum satelity SPOT i stanowią alternatywę o wyższej rozdzielczości dla danych Landsat o rozdzielczości 30 m, które są tradycyjnie używane do ustalania tej wartości bazowej.
Aby zsyntetyzować tysiące zdjęć SPOT w ujednolicone mapy podstawowe, zdjęcia zostały poddane procedurze przetwarzania obejmującej:
- Wygładzanie krawędzi, aby usunąć artefakty kompresji.
- Normalizacja radiometryczna względem wartości bazowej Landsat.
- Maskowanie chmur (konserwatywne, ręczne).
- Korekcja błędnej rejestracji (współrejestracja z kompozycją Landsat).
W przypadku końcowego łączenia obrazów zastosowano deterministyczną metodę mozaikową zamiast redukcji statystycznej. Piksele były warstwowane według rozdzielczości przestrzennej i chronologii misji satelitarnych, przy czym priorytet miały obserwacje z nowszych satelitów. Ta hierarchia warstw została połączona z ponownym próbkowaniem najbliższego sąsiada, aby zapewnić ścisłe pochodzenie danych. W rezultacie każdy piksel w końcowej mapie podstawowej zachował swoje odrębne pochodzenie i pozostał bezpośrednio powiązany z określonym źródłem obserwacji i jego metadanymi.
Dane źródłowe
Specyfikacje satelitów i czujników
Mapy podstawowe G-BFID w wersji 1.0 pochodzą z danych obrazów SPOT (Satellite pour l’Observation de la Terre). Misje SPOT, prowadzone przez CNES i dystrybuowane przez Airbusa, dostarczają obrazy optyczne w wysokiej rozdzielczości o szerokości 60 km. W tym projekcie wykorzystano archiwum zdjęć z 3 konkretnych satelitów, aby ustalić poziom odniesienia z 2008 roku:
- SPOT 2 i 4: wyposażone w czujniki HRV/HRVIR, które dostarczają dane wielospektralne w rozdzielczości 20 m i dane panchromatyczne w rozdzielczości 10 m.
- SPOT 5: wyposażony w czujnik HRG, który zapewnia znacznie lepszą rozdzielczość przestrzenną dzięki danym wielospektralnym o rozdzielczości 10 m i danych panchromatycznych o rozdzielczości 5 m.
| SPOT 2 | SPOT 4 | SPOT 5 | |
|---|---|---|---|
| Multispectral | 20 m | 20 m | 10 m |
| Panchromatic | 10 m | 10 m | 5 m |
| Pasma spektralne | Zielony, czerwony, NIR | Zielony, czerwony, NIR, SWIR | Zielony, czerwony, bliska podczerwień, krótka podczerwień |
Tabela 1. Specyfikacje techniczne misji SPOT 2, 4 i 5.
Uwaga: firma Airbus tworzy panchromatyczny produkt „supermode”, który można wykorzystać do wyostrzenia obrazów SPOT 5 do rozdzielczości 2,5 m. Dostępność tych danych jest bardzo ograniczona w przypadku specyfikacji tego projektu i nie została uwzględniona.
Wprowadzanie kolekcji Earth Engine
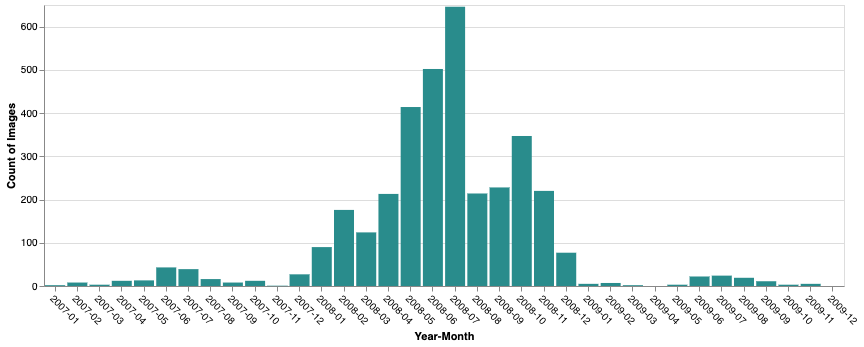
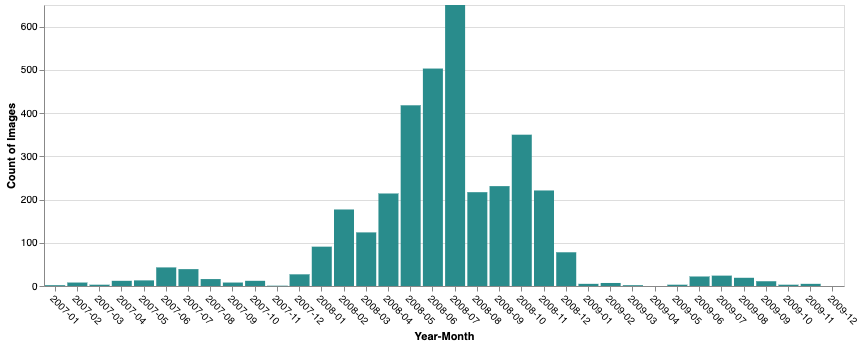
Do wygenerowania ostatecznych map bazowych wykorzystano i przetworzono 3 różne produkty danych SPOT. Te kolekcje obejmują okres od 9 stycznia 2007 r. do 26 listopada 2009 r., co zapewnia niezbędną głębię czasową, aby pokonać ograniczenia związane z zachmurzeniem, przy jednoczesnym zachowaniu wysokiej rozdzielczości.
Wybór sceny
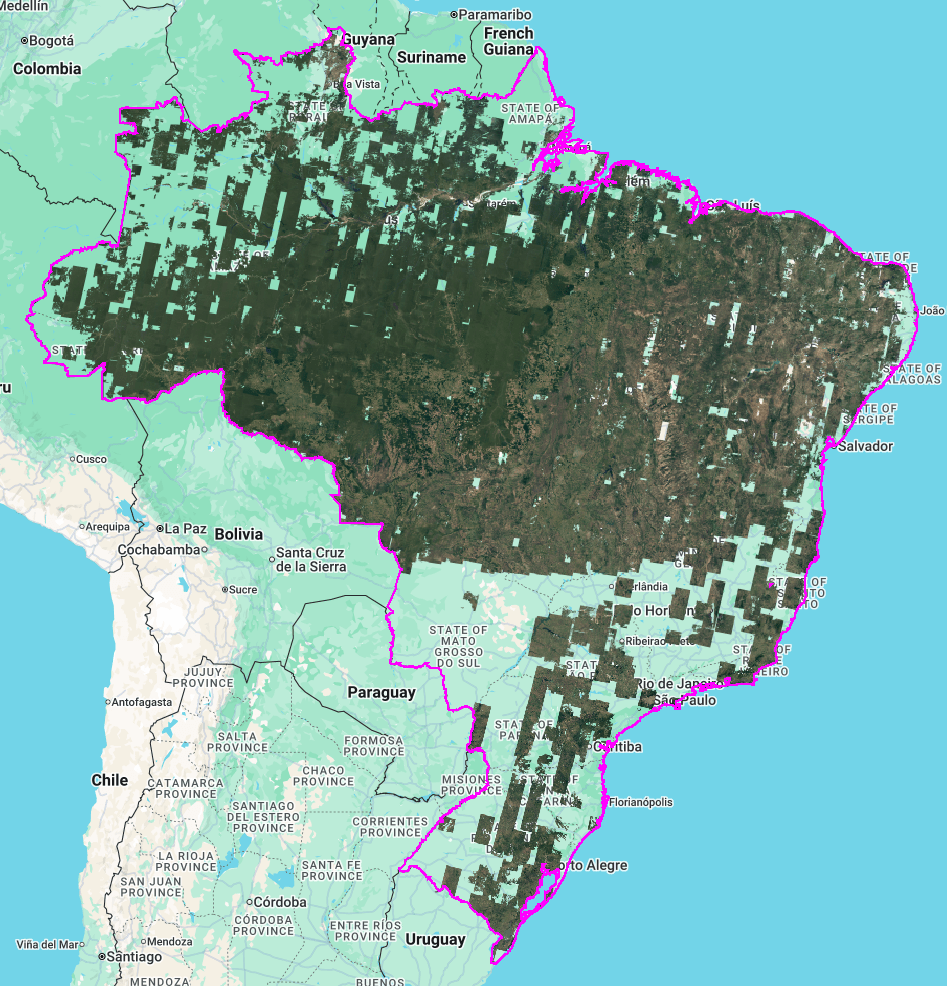
Aby wspierać działania na rzecz ochrony lasów na terenach prywatnych zarejestrowanych w Rejestrze Środowiska Wiejskiego (CAR), priorytetowo potraktowano pokrycie geograficzne w biomie Amazonii i 5 stanach „Łuku Wylesiania”: Maranhão, Mato Grosso, Pará, Rondônia i Tocantins.
Aby spełnić wymagania brazylijskiego kodeksu leśnego, wybrano okres w połowie 2008 r. Na podstawie tych kryteriów czasowych i kryteriów pokrywy chmur (<50%) zidentyfikowano łącznie 10 072 obrazy z satelitów SPOT 2, 4 i 5, które zostały wczytane do Data Catalog Earth Engine w celu przetworzenia.
Uwaga dotycząca składu spektralnego: czujniki SPOT 2, 4 i 5 nie rejestrują natywnie niebieskiego pasma spektralnego. W przypadku produktów w naturalnych kolorach dystrybutor danych udostępnia syntetyzowane pasmo niebieskie – pochodzące z istniejących pasm spektralnych, aby przybliżyć reprezentację w prawdziwych kolorach.
1. Wyostrzony obraz wielospektralny w naturalnych kolorach
- Zasób Earth Engine:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/PMS_NC/V1 - Liczba obrazów: 2977
- Zakres dat: 1 marca 2007 r. – 26 listopada 2009 r.
- Opis: ten produkt łączy pasmo panchromatyczne o wyższej rozdzielczości z pasmami wielospektralnymi, aby uzyskać wyraźny obraz RGB w 3 pasmach. Jest to preferowane źródło wizualnej mapy bazowej.
2. Wielospektralny kolor naturalny
- Zasób Earth Engine:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS_NC/V1 - Liczba obrazów: 3536
- Zakres dat: 9 stycznia 2007 r. – 26 listopada 2009 r.
- Opis: 3-pasmowy produkt w pseudonaturalnych kolorach (symulowane RGB) w natywnej rozdzielczości multispektralnej. Ta kolekcja jest używana w wizualnej mapie bazowej jako źródło dodatkowe, gdy dane po wyostrzeniu nie są dostępne.
3. Wielospektralne
- Zasób Earth Engine:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS/V1 - Liczba obrazów: 3559
- Zakres dat: 9 stycznia 2007 r. – 26 listopada 2009 r.
- Opis: źródło analitycznej mapy bazowej. Ta kolekcja zawiera oryginalne pasma spektralne (w tym bliską i krótkofalową podczerwień, jeśli są dostępne) niezbędne do obliczania wskaźników wegetacji (np. NDVI) i przeprowadzania klasyfikacji pokrycia.
Zasięg geograficzny i luki
Głównym celem map podstawowych G-BFID w wersji 1.0 jest utworzenie mapy administracyjnej Brazylii w wysokiej rozdzielczości z okresu około 2008 r. Jednak utrzymanie ścisłego przedziału czasowego (2007–2009) przy jednoczesnym filtrowaniu obrazów o wysokiej jakości i niskim zachmurzeniu spowodowało powstanie luk przestrzennych, zwłaszcza w regionach o trwałym zachmurzeniu.
Wybór scen i filtrowanie pod względem jakości
Aby zapewnić integralność danych, w latach 2007–2009 wybrano pulę kandydatów, w przypadku których początkowe zachmurzenie wynosiło <50%. W ten sposób wczytano nieco ponad 10 tys. obrazów, które następnie przefiltrowano,aby wykluczyć te z poważnymi problemami z jakością:
- Sprawdzanie ciągłości: wykluczyliśmy obrazy z telemetrią zidentyfikowaną ręcznie lub artefaktami geometrycznymi, w tym nieciągłe sceny zgrupowane przez dostawcę danych.
- Cloud QA: sceny odrzucone przez profesjonalnych analityków obrazów z powodu całkowitego zachmurzenia lub z innych powodów.
- Gęstość danych: zachowano tylko zdjęcia z >10% prawidłowych pikseli (wizualna mapa podstawowa) pozostałych po zamaskowaniu chmur (>5% w przypadku analitycznej mapy podstawowej).
Rozkład przestrzenny
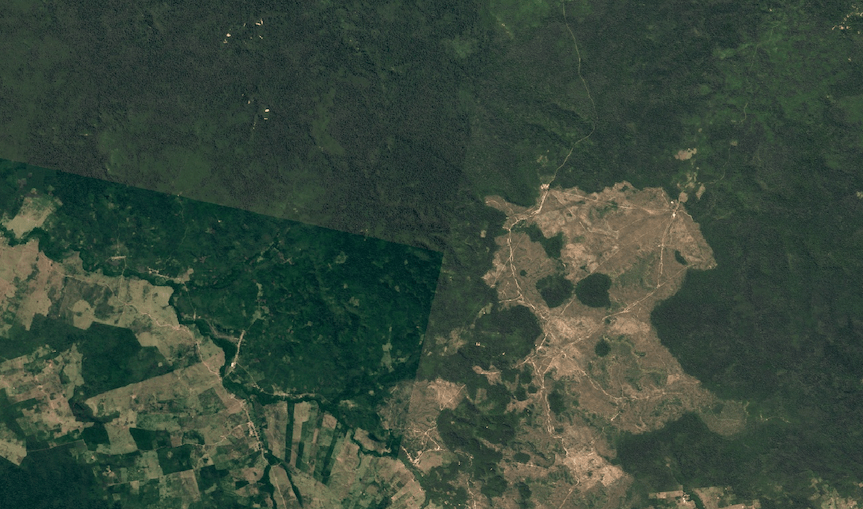
Jak pokazano na rysunku 5, mozaiki osiągają największą gęstość w „Łuku wylesiania” oraz w regionach północno-zachodnim i środkowo-zachodnim. Przezroczyste obszary to regiony, w których w określonym przedziale czasu żadne zdjęcia z satelitów SPOT 2, 4 lub 5 nie przeszły filtrów jakości wymienionych powyżej lub zostały zamaskowane z powodu chmur.
Zasięg według stanu
Na rysunku 6 przedstawiono zestawienie ważnych pikseli według stanu. W przypadku stanów takich jak Rondônia i Mato Grosso pokrycie jest niemal całkowite (ponad 95%), natomiast w stanach na południu i w częściach północno-wschodnich gęstość jest mniejsza ze względu na ograniczenia archiwum i maskowanie chmur.
Wykres pokazuje też, że w przypadku niemal wszystkich stanów mapa bazowa wizualna zapewnia nieco większy odsetek prawidłowych pikseli niż mapa bazowa analityczna. Ta różnica wynika z tego, że produkt wizualny może korzystać zarówno z wyostrzonych, jak i wielospektralnych zbiorów danych w naturalnych kolorach, podczas gdy produkt analityczny jest tworzony wyłącznie na podstawie zbiorów wielospektralnych.
Metodologia przetwarzania
Metodologia przetwarzania map bazowych G-BFID w wersji 1.0 priorytetowo traktuje pochodzenie danych i integralność radiometryczną, aby wspierać ocenę zgodności z przepisami dotyczącymi lasów. W tej sekcji najpierw opisujemy ogólną architekturę mozaiki i logikę warstwowania, które służą do zachowania integralności, a następnie chronologiczne kroki wstępnego przetwarzania i normalizacji stosowane do poszczególnych obrazów źródłowych przed ostatecznym złożeniem.
Metoda mozaikowa
Ostateczne mapy bazowe zostały utworzone przy użyciu metody mozaikowej, a nie reduktorów statystycznych (takich jak kompozycje średnie lub medianowe). Dzięki temu końcowe produkty zachowują pierwotne wartości spektralne i tekstury przestrzenne obrazów źródłowych. Mozaika nie uśrednia wielu obserwacji, dzięki czemu zachowuje odrębne pochodzenie każdego piksela.
Logika warstw
Dane wejściowe w postaci zdjęć zostały nałożone na siebie w hierarchii, która faworyzuje wyższą rozdzielczość przestrzenną i późniejsze misje satelitarne:
- Wizualna mapa podstawowa: zdjęcia zostały posortowane według rozmiaru piksela (priorytetem były dane o najwyższej dostępnej rozdzielczości), a następnie według misji satelitarnej (priorytetem były dane z nowszych satelitów SPOT).
- Analityczna mapa podstawowa: zdjęcia zostały nałożone warstwami według misji satelitarnej, przy czym priorytetowo traktowano obserwacje z późniejszych misji SPOT, aby uzyskać najlepsze dostępne dane.
Integralność i identyfikowalność
Ponowne próbkowanie: wszystkie wewnętrzne przekształcenia wykorzystywały ponowne próbkowanie metodą najbliższego sąsiada. Pozwala to uniknąć efektów wygładzania interpolacyjnego, które występują w przypadku innych metod, i zapewnia, że na pierwotne właściwości radiometryczne i przestrzenne pikseli źródłowych nie mają wpływu piksele sąsiednie.
Śledzenie danych: w obu produktach znajduje się pasmo metadanych
datena piksel. Umożliwia to użytkownikom określenie dokładnej daty obserwacji w dowolnym miejscu, co zapewnia pełną przejrzystość ocen zgodności z kodeksem leśnym.
Ulepszanie krawędzi obrazu
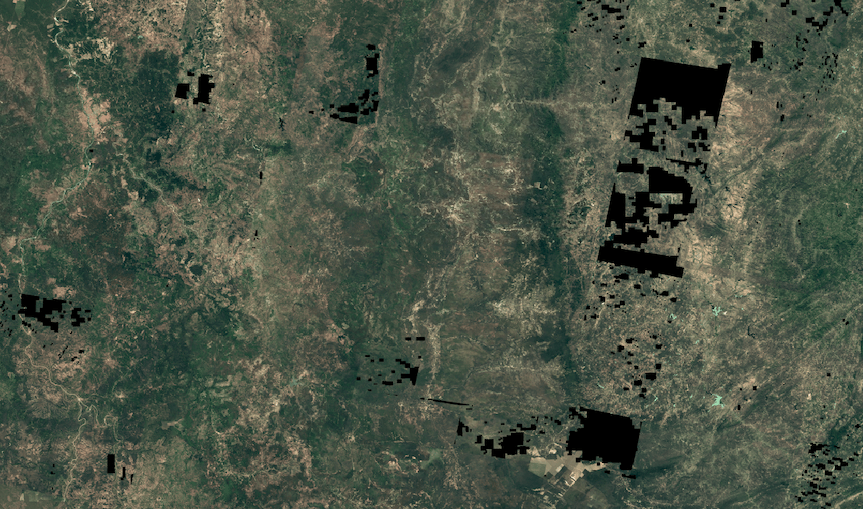
Aby zapewnić wyraźne granice między nakładającymi się scenami, zastosowano proces wygładzania krawędzi, który usuwa artefakty obecne na zdjęciach źródłowych. Te artefakty, które pojawiały się jako nakrapiane lub „zaszumione” piksele wzdłuż krawędzi obrazu, były charakterystyczne dla kompresji stratnej w danych dostarczanych przez dostawcę. Aby rozwiązać ten problem, zastosowano minimalną erozję ogniskową o wartości 2,5 piksela do masek obrazów, co pozwoliło usunąć artefakty krawędzi o niskiej jakości i zapewnić, że w mozaikach końcowych będą używane tylko prawidłowe dane (rysunek 7).

Maskowanie chmur
Aby zapewnić najwyższą możliwą integralność danych w przypadku G-BFID w wersji 1.0, w całym archiwum zdjęć zastosowano ręczne maskowanie. Wybraliśmy tę metodę zamiast metod automatycznych, aby umożliwić bardziej ostrożne wykluczanie pikseli, na które mają wpływ chmury lub inne zakłócenia atmosferyczne.
Procedura maskowania
Przeszkoleni analitycy zidentyfikowali obszary zawierające chmury i powiązane z nimi artefakty atmosferyczne. Aby mieć pewność, że te problematyczne piksele zostały w pełni uwzględnione, zastosowaliśmy konserwatywną strategię maskowania z użyciem uproszczonych, przybliżonych geometrii. Zamiast precyzyjnie wyznaczać granice poszczególnych chmur, zamaskowano większe prostokątne obszary, aby mozaika była jak najbardziej czytelna.
Chociaż to podejście jest celowo agresywne – często usuwa prawidłowe piksele sąsiadujące z chmurami – uznano je za konieczne, aby zapewnić produkt o wysokiej jakości w przypadku danych bazowych z 2008 roku.
Zasady maskowania i integracja
Maski ręczne zostały utworzone wyłącznie dla kolekcji obrazów wielospektralnych i wyostrzonych obrazów w kolorach naturalnych. Ponieważ produkt wielospektralny w naturalnych kolorach jest tworzony na podstawie danych wielospektralnych, maski te zostały następnie przeniesione do pokrywających się obrazów wielospektralnych podczas przetwarzania.
Wszystkie obrazy wielospektralne, które nie miały dopasowanego, ręcznie zamaskowanego odpowiednika w kolorach naturalnych, zostały wykluczone z mozaiki końcowej. Dzięki temu każdy piksel w pakiecie G-BFID w wersji 1.0 – niezależnie od typu produktu – będzie pozbawiony chmur.
Interpretacja luk w danych
Przezroczyste luki w mozaikach końcowych oznaczają obszary, w których w okresie 2007–2009 nie były dostępne żadne prawidłowe dane wysokiej jakości. Te luki wynikają z połączenia opisanej powyżej konserwatywnej ręcznej maski, początkowego odrzucenia scen z dużym zachmurzeniem (ponad 50%) lub całkowitego braku dostępnych zdjęć źródłowych od dostawcy w określonym regionie. Większe luki regionalne zwykle odzwierciedlają brak dostępnych obrazów z 2008 roku, ale charakterystyczne „blokowe” wzory widoczne na rysunku 9 są konsekwencją maskowania chmur.
Korekcja niedopasowania
Wdrożono zautomatyzowany proces korejestracji, aby ograniczyć znaczące błędy rejestracji w obrazach źródłowych SPOT w stosunku do geograficznej linii bazowej uzyskanej na podstawie danych Landsat Collection 2.
Wartość bazowa
Wygenerowano mozaikę referencyjną Landsat Collection 2 bez chmur, która służy jako obraz referencyjny do korejestracji. Ten obraz referencyjny został utworzony przy użyciu reduktora mediany na obrazach Landsat 7 i 8 obejmujących Brazylię w latach 2006–2010. Czerwony zakres Landsat został wybrany jako główny cel rejestracji, aby pasował do czerwonego zakresu SPOT.
Szacowanie przemieszczenia
Do obliczenia przesunięcia na poziomie piksela między danymi źródłowymi SPOT a danymi referencyjnymi Landsat użyto ee.Image.displacementalgorytmu.
- Parametry wyszukiwania: do modelu przemieszczenia zastosowano maksymalne przesunięcie wynoszące 500 m i parametr sztywności wynoszący 5.
- Agregacja statystyczna: wartości delta x ($dx$) i delta y ($dy$) oraz wartości ufności zostały zagregowane w całym obszarze obrazu za pomocą funkcji redukującej średnią.
- Obliczanie wielkości: na podstawie tych zagregowanych statystyk obliczono całkowite oszacowanie przesunięcia wielkości $M = \sqrt{dx^2 + dy^2}$, aby przedstawić średnie przesunięcie sceny.
Zasady korekty
Sceny zostały skategoryzowane i skorygowane na podstawie obliczonych statystyk przemieszczenia, aby nadać priorytet znaczącym ulepszeniom, unikając jednocześnie wprowadzania nowych artefaktów:
- Automatyczna korekta: obrazy, w przypadku których wielkość przesunięcia $M > 30$ m, a poziom ufności $C > 0,3$, zostały automatycznie przesunięte za pomocą oszacowanych wartości $dx$ i $dy$.
- Ocena ręczna: w przypadku scen o bardzo dużym szacowanym przesunięciu ($M > 100 m), ale niskim poziomie ufności ($C ≤ 0,3$) przeprowadzono ręczną weryfikację. Korekty były akceptowane tylko wtedy, gdy wynikowa korejestracja wykazywała wyraźną poprawę w stosunku do pierwotnego umiejscowienia.
- Wykluczenie: sceny, które po próbie korekty pozostały znacznie niedopasowane, lub te, które miały niewystarczającą liczbę cech do wiarygodnego dopasowania, zostały wykluczone z mozaiki.
Wdrażanie i kontrola jakości
Skorygowane obrazy zostały ponownie przekształcone za pomocą metody ponownego próbkowania najbliższego sąsiada, aby zachować pierwotne wartości radiometryczne i uniknąć efektów wygładzania interpolacji dwuliniowej lub kubicznej.
Aby zapewnić śledzenie przestrzenne, do każdego obrazu dodano pasmo logiczne coregistered, które zostało zachowane w ostatecznej mozaice. Te metadane pozwalają użytkownikom odróżniać piksele, które zostały poddane korekcie przestrzennej, od tych, które zachowały pierwotne położenie.
Normalizacja radiometryczna
Aby uwzględnić różne warunki atmosferyczne i różnice w sensorach w kolekcjach źródłowych SPOT, do obrazów składających się na mozaiki zastosowano normalizację radiometryczną. Zarówno mapa bazowa wizualna, jak i analityczna wykorzystują dopasowywanie histogramów do spójnej bazowej wartości docelowej Landsat z 2008 roku.
Landsat został wybrany jako punkt odniesienia zamiast innych, mniej dokładnych alternatyw, takich jak MODIS, ponieważ jego rozdzielczość 30 m jest bardziej zbliżona do danych SPOT o rozdzielczości 5–20 m. Podobieństwo to sprawia, że histogramy spektralne są bardziej równomiernie reprezentatywne, co pozwala na dokładniejsze przenoszenie radiometryczne podczas procesu dopasowywania. Konkretna metodologia tej harmonizacji różni się nieco w zależności od tego, czy ostateczny przypadek użycia jest wizualny czy analityczny.
Wizualna mapa bazowa
Aby zminimalizować nieciągłości radiometryczne między sąsiednimi obrazami i zapewnić niemal bezproblemowy wygląd, wdrożono proces równoważenia kolorów za pomocą dopasowywania histogramów. Wartości pikseli zostały dostosowane do spójnego mozaikowego obrazu Landsat z 2008 roku.
Proces ten składa się z tych kroków:
- Maskowanie analizy: aby zapewnić stabilność statystyk podczas dopasowywania histogramu, generowana jest tymczasowa maska analizy, która wyklucza obszary mogące zniekształcać dane. Maskowanie obejmuje 2 główne funkcje:
- Obszary o dużych zmianach: piksele, które przekraczają 95 percentyl bezwzględnej różnicy między obrazem SPOT a mozaiką referencyjną Landsat, są wykluczane.
- Zbiorniki wodne: wykluczono wysoką zmienność odbicia od wody za pomocą zbioru danych JRC Yearly Water Classification History. Zbiór danych jest filtrowany do roku 2008, a następnie stosowana jest maska odwrotna, aby w analizie statystycznej uwzględnić tylko klasy inne niż woda.
- Generowanie tabeli przeglądowej (LUT): na podstawie zamaskowanych danych obliczane są skumulowane histogramy zarówno dla pasm SPOT źródłowych, jak i pasm Landsat docelowych.
- Interpolacja: wartości pikseli źródłowych są ponownie mapowane na wartości docelowe za pomocą wygenerowanej tabeli LUT, co pozwala dopasować profil radiometryczny danych SPOT do danych referencyjnych Landsat z 2008 roku.
Analityczna mapa bazowa
Przetwarzanie analitycznej mapy podstawowej jest podobne do przetwarzania wizualnej mapy podstawowej, ale obejmuje konwersję wartości DN na współczynnik odbicia na górnej granicy atmosfery:
1. Przekształcanie współczynnika odbicia na górnej granicy atmosfery (TOA)
Surowe dane cyfrowe (DN) z satelity SPOT są przekształcane w wartości odbicia TOA, aby uwzględnić właściwości fizyczne czujnika i geometrię słoneczną:
- Obliczanie luminancji: zastosowanie metadanych dotyczących wzmocnienia fizycznego i odchylenia w przypadku poszczególnych pasm dostawcy.
- Normalizacja odbicia: luminancja jest normalizowana względem promieniowania słonecznego, cosinusa kąta zenitu słonecznego i odległości Ziemia–Słońce w określonym dniu pozyskania.
2. Dopasowywanie histogramu
Aby jeszcze bardziej zminimalizować różnice radiometryczne między różnymi obrazami SPOT, stosujemy proces dopasowywania histogramów:
Maskowanie analizy: ten krok wykorzystuje dokładnie to samo maskowanie analizy, które opisano w sekcji powyżej dotyczącej wizualnej mapy podstawowej: wyklucza piksele zmian powyżej 95 percentyla i filtruje piksele wody za pomocą odwróconej maski klasyfikacji JRC z 2008 roku.
Harmonizacja: podobnie jak w przypadku wizualnej mapy podstawowej wartości pikseli są ponownie mapowane za pomocą tabeli przeglądowej, aby dopasować profil radiometryczny do referencyjnych danych Landsat TOA. Zapewnia to spójność radiometryczną mozaiki na potrzeby trenowania modeli uczenia maszynowego o szerokim zakresie i przeprowadzania wiarygodnych wnioskowań.
Ograniczenia i znane problemy
Chociaż G-BFID w wersji 1.0 zapewnia wysoką rozdzielczość w odniesieniu do danych z 2008 roku, użytkownicy powinni mieć świadomość kilku ograniczeń związanych z historycznym archiwum SPOT i stosowanymi metodami przetwarzania.
Kompletność przestrzenna i luki
Mapy bazowe nie zapewniają 100% pokrycia geograficznego Brazylii. Występują luki, ponieważ żadne zdjęcia nie spełniały rygorystycznych wymagań projektu dotyczących okresu (2007–2009), pokrywy chmur ani standardów jakości. Te luki występują najczęściej w regionach, w których niebo jest stale zachmurzone lub w których w przeszłości rzadziej pozyskiwano dane satelitarne. Więcej informacji znajdziesz w sekcji Zasięg geograficzny i luki w danych.
Zmienna rozdzielczość natywna
Chociaż produkty końcowe są dostarczane w nominalnym rozmiarze piksela wynoszącym 5 metrów (wizualny) i 10 metrów (analityczny), obrazy źródłowe składają się z pikseli o rozmiarach 5 m, 10 m i 20 m. Ponieważ do zachowania integralności spektralnej zastosowano ponowne próbkowanie metodą najbliższego sąsiada, granice między różnymi rozdzielczościami mogą być widoczne.

Pozostałe błędy rejestracji
Pomimo automatycznego przepływu pracy związanego z współrejestracją w niektórych obszarach mogą nadal występować przesunięcia przestrzenne. Pozostałe błędy rejestracji najprawdopodobniej wystąpią w regionach o ekstremalnym ukształtowaniu terenu lub w gęstych, jednorodnych obszarach leśnych, w których algorytm nie miał wystarczającej liczby punktów orientacyjnych do obliczenia wektorów przemieszczenia o wysokim poziomie ufności.
Artefakty atmosferyczne i chmurowe
Ręczny proces maskowania chmur był celowo konserwatywny i agresywny, ale nie jest wyczerpujący. Użytkownicy mogą czasami napotkać pozostałości artefaktów, takich jak bardzo cienka mgła cirrusowa lub małe cienie chmur.
Niespójność radiometryczna a wydajność ML
Dopasowanie histogramu zostało użyte do zminimalizowania nieciągłości radiometrycznych, ale między sąsiednimi obrazami nadal występuje resztkowa zmienność spektralna. W przypadku automatycznej klasyfikacji pokrycia terenu lub zastosowań uczenia maszynowego ta zmienność zwiększa wariancję spektralną dla danego typu pokrycia terenu w mozaice. Ten szerszy zakres danych może zmniejszyć precyzję rozdzielania klas podczas wnioskowania, co może prowadzić do większej liczby błędów.
Nasycenie spektralne
W obszarach o ekstremalnej jasności, takich jak silnie odblaskowe powierzchnie miejskie, określone rodzaje gleby lub jasny piasek, piksele mogą osiągać maksymalny wykrywalny limit czujnika. Ta „saturacja” powoduje utratę tekstury i szczegółów w tych konkretnych miejscach.
Zmienione współczynniki pasm i wskaźniki wegetacji
Aby uzyskać niemal idealną mozaikę, do każdego pasma widmowego zastosowano dopasowanie histogramu, co z natury rzeczy zmienia pierwotne proporcje fizyczne między pasmami. W rezultacie obliczanie wspólnych indeksów, takich jak NDVI lub inne wskaźniki oparte na stosunku pasm, będzie dawać wartości różniące się od wartości w niezmienionych zbiorach danych źródłowych. Chociaż te indeksy pochodne mogą nadal odzwierciedlać względne wzorce przestrzenne w mozaice, nie należy ich używać do celów bezwzględnych, porównań między czujnikami ani analiz, które opierają się na sztywnych progach indeksu.