- डेटासेट की उपलब्धता
- 2015-06-27T00:00:00Z–2026-07-15T13:33:12.977000Z
- डेटासेट बनाने वाली कंपनी
- World Resources Institute Google
- टैग
ब्यौरा
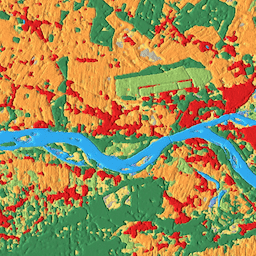
Dynamic World, 10 मीटर का नियर-रीयल-टाइम (एनआरटी) लैंड यूज़/लैंड कवर (एलयूएलसी) डेटासेट है. इसमें नौ क्लास के लिए, क्लास की संभावनाओं और लेबल की जानकारी शामिल होती है.
Dynamic World के अनुमान, Sentinel-2 L1C कलेक्शन के लिए 27-06-2015 से लेकर आज तक उपलब्ध हैं. अक्षांश के आधार पर, Sentinel-2 की रीविज़िट फ़्रीक्वेंसी दो से पांच दिनों के बीच होती है. Dynamic World के अनुमान, Sentinel-2 L1C इमेज के लिए जनरेट किए जाते हैं. इनमें CLOUDY_PIXEL_PERCENTAGE <= 35% होता है. S2 Cloud Probability, Cloud Displacement Index, और Directional Distance Transform के कॉम्बिनेशन का इस्तेमाल करके, बादलों और बादलों की परछाइयों को हटाने के लिए अनुमानों को मास्क किया जाता है.
Dynamic World कलेक्शन में मौजूद इमेज के नाम, उन Sentinel-2 L1C ऐसेट के नामों से मेल खाते हैं जिनसे उन्हें लिया गया है.उदाहरण के लिए:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
इससे मेल खाने वाली Dynamic World इमेज का नाम यह है: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
"लेबल" बैंड को छोड़कर, सभी संभावना वाले बैंड का कुल योग एक होता है.
Dynamic World डेटासेट के बारे में ज़्यादा जानने और कंपोज़िट जनरेट करने, इलाके के आंकड़ों का हिसाब लगाने, और टाइम सीरीज़ के साथ काम करने के उदाहरण देखने के लिए, Dynamic World के बारे में जानकारी देने वाली ट्यूटोरियल सीरीज़ देखें.
Dynamic World की क्लास के अनुमान, एक ही इमेज से लिए जाते हैं. इसके लिए, छोटे मूविंग विंडो से स्पेस के हिसाब से कॉन्टेक्स्ट का इस्तेमाल किया जाता है. इसलिए, अनुमानित लैंड कवर के लिए टॉप-1 "संभावनाएं" तुलनात्मक रूप से कम हो सकती हैं. जैसे, फ़सलें. ऐसा इसलिए, क्योंकि इन्हें समय के साथ कवर के हिसाब से तय किया जाता है. साथ ही, इनमें साफ़ तौर पर अंतर दिखाने वाली सुविधाएं मौजूद नहीं होती हैं. शुष्क मौसम में, ज़्यादा रिफ़्लेक्शन वाली सतहों, रेत, सनग्लिंट वगैरह में भी यह फ़िनॉमिनन दिख सकता है.
सिर्फ़ उन पिक्सल को चुनने के लिए जो भरोसेमंद तरीके से Dynamic World क्लास से जुड़े हैं, हमारा सुझाव है कि टॉप-1 अनुमान की अनुमानित "संभावना" को थ्रेशोल्ड करके, Dynamic World के आउटपुट को मास्क करें.
बैंड
बैंड
पिक्सल साइज़: 10 मीटर (सभी बैंड)
| नाम | कम से कम | ज़्यादा से ज़्यादा | पिक्सल साइज़ | ब्यौरा |
|---|---|---|---|---|
water |
0 | 1 | 10 meters | पानी से पूरी तरह ढके होने की अनुमानित संभावना |
trees |
0 | 1 | 10 meters | पेड़ों से पूरी तरह ढके होने की अनुमानित संभावना |
grass |
0 | 1 | 10 meters | घास से पूरी तरह ढके होने की अनुमानित संभावना |
flooded_vegetation |
0 | 1 | 10 meters | बाढ़ से पूरी तरह ढके होने की अनुमानित संभावना |
crops |
0 | 1 | 10 meters | फ़सलों से पूरी तरह ढके होने की अनुमानित संभावना |
shrub_and_scrub |
0 | 1 | 10 meters | झाड़ियों और झाड़-झंखाड़ से पूरी तरह ढके होने की अनुमानित संभावना |
built |
0 | 1 | 10 meters | बनी हुई चीज़ों से पूरी तरह ढके होने की अनुमानित संभावना |
bare |
0 | 1 | 10 meters | खाली जगह से पूरी तरह ढके होने की अनुमानित संभावना |
snow_and_ice |
0 | 1 | 10 meters | बर्फ़ और बर्फ़ के पानी से पूरी तरह ढके होने की अनुमानित संभावना |
label |
0 | 8 | 10 meters | सबसे ज़्यादा अनुमानित संभावना वाले बैंड का इंडेक्स |
लेबल क्लास टेबल
| मान | रंग | ब्यौरा |
|---|---|---|
| 0 | #419bdf | पानी |
| 1 | #397d49 | पेड़ |
| 2 | #88b053 | घास |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | फ़सलें |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | बनी हुई चीज़ें |
| 7 | #a59b8f | खाली जगह |
| 8 | #b39fe1 | snow_and_ice |
इमेज प्रॉपर्टी
इमेज प्रॉपर्टी
| नाम | टाइप | ब्यौरा |
|---|---|---|
| dynamicworld_algorithm_version | STRING | वर्शन स्ट्रिंग, जो इमेज बनाने के लिए इस्तेमाल किए गए Dynamic World मॉडल और अनुमान की प्रोसेस की खास तौर पर पहचान करती है. |
| qa_algorithm_version | STRING | वर्शन स्ट्रिंग, जो इमेज बनाने के लिए इस्तेमाल की गई, बादलों को मास्क करने की प्रोसेस की खास तौर पर पहचान करती है. |
इस्तेमाल की शर्तें
इस्तेमाल की शर्तें
इस डेटासेट का लाइसेंस CC-BY 4.0 के तहत मिलता है. इसके लिए, एट्रिब्यूशन के तौर पर यह जानकारी देना ज़रूरी है: "यह डेटासेट, Dynamic World प्रोजेक्ट के लिए Google ने बनाया है. इसके लिए, उसने National Geographic Society और World Resources Institute के साथ साझेदारी की है."
इसमें, Copernicus Sentinel से लिया गया डेटा शामिल है. इस डेटा में बदलाव किया गया है. यह डेटा, साल 2015 से लेकर आज तक का है. Sentinel डेटा का कानूनी नोटिस देखें.
उद्धरण
Brown, C.F., Brumby, S.P., Guzder-Williams, B. वगैरह. Dynamic World, नियर रीयल-टाइम ग्लोबल 10 मीटर लैंड यूज़ लैंड कवर मैपिंग. साइंटिफ़िक डेटा 9, 251 (2022). doi:10.1038/s41597-022-01307-4
डीओआई
Earth Engine की मदद से एक्सप्लोर करें
कोड एडिटर (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m