- ความพร้อมใช้งานของชุดข้อมูล
- 2014-10-03T00:00:00Z–2026-07-17T02:51:26Z
- ผู้ผลิตชุดข้อมูล
- สหภาพยุโรป/ESA/Copernicus
- ช่วงการเก็บข้อมูล
- 6 วัน
- แท็ก
คำอธิบาย
ภารกิจ Sentinel-1 ให้ข้อมูลจากเครื่องมือเรดาร์ชนิดช่องรับคลื่นสังเคราะห์ (SAR) ในย่านความถี่ C-Band ที่มีโพลาไรเซชันคู่ที่ 5.405GHz (ย่านความถี่ C) คอลเล็กชันนี้ ประกอบด้วยฉากที่ตรวจพบช่วงภาคพื้นของ S1 (GRD) ซึ่งประมวลผล โดยใช้ Sentinel-1 Toolbox เพื่อสร้างผลิตภัณฑ์ที่ผ่านการปรับเทียบและปรับแก้เชิงออร์โท โดยคอลเล็กชันจะอัปเดตทุกวัน ระบบจะส่งผ่านข้อมูลเนื้อหาใหม่ภายใน 2 วันหลังจากที่พร้อมใช้งาน
คอลเล็กชันนี้ มีฉาก GRD ทั้งหมด แต่ละฉากมีความละเอียด 3 แบบ (10, 25 หรือ 40 เมตร), การผสมผสาน 4 แบนด์ (สอดคล้องกับ การโพลาไรซ์ของฉาก) และโหมดเครื่องมือ 3 โหมด การใช้คอลเล็กชัน ในบริบทของโมเสกอาจต้องกรองลงไปจนถึงชุดแถบและพารามิเตอร์ที่เป็นเนื้อเดียวกัน ดูรายละเอียดการใช้คอลเล็กชันและการประมวลผลล่วงหน้าได้ที่บทความนี้ แต่ละฉากจะมี แถบโพลาไรเซชันที่เป็นไปได้ 4 แถบ 1 หรือ 2 แถบ โดยขึ้นอยู่กับ การตั้งค่าโพลาไรเซชันของเครื่องมือ การผสมผสานที่เป็นไปได้ คือ VV แถบความถี่เดียว, HH แถบความถี่เดียว, VV+VH แถบความถี่คู่ และ HH+HV แถบความถี่คู่
- VV: โคโพลาไรเซชันเดี่ยว, ส่งแนวตั้ง/รับแนวตั้ง
- HH: โคโพลาไรเซชันเดี่ยว, ส่งแนวนอน/รับแนวนอน
- VV + VH: ครอสส์โพลาไรเซชันแบบดูอัลแบนด์, ส่งแนวตั้ง/รับแนวนอน
- HH + HV: ครอสส์โพลาไรเซชันแบบดูอัลแบนด์, ส่งแนวนอน/รับแนวตั้ง
นอกจากนี้ แต่ละฉากยังมีแถบ "มุม" เพิ่มเติมซึ่งมี มุมตกกระทบโดยประมาณจากรูปทรงรีเป็นองศาในทุกจุด แถบนี้สร้างขึ้นโดยการประมาณค่าพร็อพเพอร์ตี้ "incidenceAngle" ของฟิลด์กริด "geolocationGridPoint" ที่จัดไว้ให้ในแต่ละเนื้อหา
แต่ละฉากได้รับการประมวลผลล่วงหน้าด้วย กล่องเครื่องมือ Sentinel-1 โดยใช้ขั้นตอนต่อไปนี้
- การลบสัญญาณรบกวนจากความร้อน
- การปรับเทียบรังสีเมตริก
- การแก้ไขภูมิประเทศโดยใช้ SRTM 30 หรือ ASTER DEM สำหรับพื้นที่ที่มีละติจูดมากกว่า 60 องศา ซึ่งไม่มี SRTM ระบบจะแปลงค่าที่แก้ไขภูมิประเทศแล้วขั้นสุดท้ายเป็นเดซิเบลผ่านการปรับขนาดแบบลอการิทึม (10*log10(x))
ดูข้อมูลเพิ่มเติมเกี่ยวกับขั้นตอนการประมวลผลล่วงหน้าเหล่านี้ได้ที่ บทความการประมวลผลล่วงหน้าของ Sentinel-1 ดูคำแนะนำเพิ่มเติมเกี่ยวกับการทำงานกับภาพจาก Sentinel-1 ได้ที่บทแนะนำของ Guido Lemoine เกี่ยวกับพื้นฐานของ SAR และบทแนะนำของ Mort Canty เกี่ยวกับการตรวจหาการเปลี่ยนแปลงของ SAR
ระบบจะคำนวณคอลเล็กชันนี้แบบเรียลไทม์ หากต้องการใช้คอลเล็กชันพื้นฐานที่มีค่ากำลังดิบ (ซึ่งอัปเดตได้เร็วกว่า) โปรดดู COPERNICUS/S1_GRD_FLOAT
ย่านความถี่
ย่านความถี่
ขนาดพิกเซล: แตกต่างกัน
| ชื่อ | หน่วย | ต่ำสุด | สูงสุด | ขนาดพิกเซล | คำอธิบาย |
|---|---|---|---|---|---|
HH |
dB | -50* | 1* | 10 เมตร | การร่วมโพลาไรซ์เดี่ยว, ส่งแนวนอน/รับแนวนอน |
HV |
dB | -50* | 1* | 10 เมตร | การโพลาไรซ์แบบครอสแบนด์คู่ การส่งแนวนอน/การรับแนวตั้ง |
VV |
dB | -50* | 1* | 10 เมตร | การโพลาไรซ์ร่วมแบบเดี่ยว ส่งแนวตั้ง/รับแนวตั้ง |
VH |
dB | -50* | 1* | 10 เมตร | การโพลาไรซ์แบบครอสแบนด์คู่ การส่งสัญญาณแนวตั้ง/การรับสัญญาณแนวนอน |
angle |
องศา | 0* | 90* | 20000 เมตร | มุมตกกระทบโดยประมาณจากรูปทรงรี |
พร็อพเพอร์ตี้รูปภาพ
พร็อพเพอร์ตี้รูปภาพ
| ชื่อ | ประเภท | คำอธิบาย |
|---|---|---|
| GRD_Post_Processing_facility_country | STRING | ชื่อประเทศที่สถานที่ตั้งอยู่ องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| GRD_Post_Processing_facility_name | STRING | ชื่อของสถานที่ที่ดำเนินการขั้นตอนการประมวลผล องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| GRD_Post_Processing_facility_organisation | STRING | ชื่อองค์กรที่รับผิดชอบดูแลสถานที่ องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| GRD_Post_Processing_facility_site | STRING | สถานที่ตั้งทางภูมิศาสตร์ของสถานที่ องค์ประกอบนี้ กำหนดค่าได้ภายใน IPF |
| GRD_Post_Processing_software_name | STRING | ชื่อซอฟต์แวร์ |
| GRD_Post_Processing_software_version | STRING | การระบุเวอร์ชันซอฟต์แวร์ |
| GRD_Post_Processing_start | DOUBLE | เวลาเริ่มต้นการประมวลผล |
| GRD_Post_Processing_stop | DOUBLE | เวลาหยุดการประมวลผล |
| SLC_Processing_facility_country | STRING | ชื่อประเทศที่สถานที่ตั้งอยู่ องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| SLC_Processing_facility_name | STRING | ชื่อของสถานที่ที่ดำเนินการขั้นตอนการประมวลผล องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| SLC_Processing_facility_organisation | STRING | ชื่อองค์กรที่รับผิดชอบดูแลสถานที่ องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| SLC_Processing_facility_site | STRING | สถานที่ตั้งทางภูมิศาสตร์ของสถานที่ องค์ประกอบนี้สามารถกำหนดค่าได้ภายใน IPF |
| SLC_Processing_software_name | STRING | ชื่อซอฟต์แวร์ |
| SLC_Processing_software_version | STRING | การระบุเวอร์ชันซอฟต์แวร์ |
| SLC_Processing_start | DOUBLE | เวลาเริ่มต้นการประมวลผล |
| SLC_Processing_stop | DOUBLE | เวลาหยุดการประมวลผล |
| S1TBX_Calibration_Operator_version | STRING | เวอร์ชันเครื่องมือปรับเทียบ Sentinel-1 Toolbox |
| S1TBX_SAR_Processing_version | STRING | เวอร์ชันเครื่องมือประมวลผล SAR ของ Sentinel-1 Toolbox |
| SNAP_Graph_Processing_Framework_GPF_version | STRING | เวอร์ชันของ Sentinel Application Platform (SNAP) |
| startTimeANX | DOUBLE | เวลาเริ่มต้นการตรวจจับของข้อมูลอินพุตที่สัมพันธ์กับ จุดตัดของโหนดที่ขึ้น นี่คือจำนวนเวลาที่ผ่านไป นับตั้งแต่จุดตัดของโหนดขาขึ้นของวงโคจร [มิลลิวินาที] |
| stopTimeANX | DOUBLE | เวลาหยุดการตรวจจับของข้อมูลอินพุตที่สัมพันธ์กับ การข้ามโหนดขาขึ้น นี่คือจำนวนเวลาที่ผ่านไป นับตั้งแต่จุดตัดของโหนดขาขึ้นของวงโคจร [มิลลิวินาที] |
| nssdcIdentifier | STRING | ระบุภารกิจแบบไม่ซ้ำตามมาตรฐาน ที่กำหนดโดยศูนย์ข้อมูลโลกสำหรับข้อมูลดาวเทียม (WDC-SI) ซึ่งดูได้ที่นี่ |
| familyName | STRING | ชื่อภารกิจแบบเต็ม เช่น "SENTINEL-1" |
| platform_number | STRING | ตัวระบุที่เป็นตัวอักษรและตัวเลขของแพลตฟอร์มภายในภารกิจ |
| platformHeading | DOUBLE | ส่วนหัวของแพลตฟอร์มเทียบกับทิศเหนือ (องศา) |
| เครื่องมือ | STRING | ข้อมูลที่เกี่ยวข้องกับเครื่องมือในแพลตฟอร์มที่ได้ข้อมูลมา |
| instrumentMode | STRING | IW (Interferometric Wide Swath), SM (Strip Map) หรือ EW (Extra Wide Swath) ดูรายละเอียดผลิตภัณฑ์ |
| instrumentSwath | STRING | รายการแถบที่อยู่ในผลิตภัณฑ์ ผลิตภัณฑ์ส่วนใหญ่จะมีแถบเดียว ยกเว้นผลิตภัณฑ์ TOPS SLC ซึ่งมี 3 หรือ 5 แถบ |
| orbitNumber_start | DOUBLE | หมายเลขออบิทสัมบูรณ์ของบรรทัดที่เก่าที่สุดภายในข้อมูลภาพ |
| orbitNumber_stop | DOUBLE | หมายเลขออบิทสัมบูรณ์ของบรรทัดล่าสุดภายในข้อมูลภาพ |
| relativeOrbitNumber_start | DOUBLE | หมายเลขวงโคจรสัมพัทธ์ของบรรทัดที่เก่าที่สุดภายในข้อมูลภาพ |
| relativeOrbitNumber_stop | DOUBLE | หมายเลขวงโคจรสัมพัทธ์ของเส้นล่าสุดภายในข้อมูลรูปภาพ |
| cycleNumber | DOUBLE | หมายเลขลำดับสัมบูรณ์ของรอบภารกิจที่ใช้กับข้อมูลรูปภาพที่เก่าที่สุด |
| phaseIdentifier | DOUBLE | รหัสของระยะภารกิจที่ใช้ข้อมูลรูปภาพที่เก่าที่สุด |
| orbitProperties_pass | STRING | ทิศทางการโคจร ("ขึ้น" หรือ "ลง") สำหรับข้อมูลรูปภาพที่เก่าที่สุดในผลิตภัณฑ์ (จุดเริ่มต้นของผลิตภัณฑ์) |
| orbitProperties_ascendingNodeTime | DOUBLE | เวลา UTC ของจุดขึ้นของวงโคจร องค์ประกอบนี้ มีอยู่ในผลิตภัณฑ์ทั้งหมด ยกเว้นผลิตภัณฑ์ ASAR L2 OCN ซึ่งสร้างจากอินพุต ASAR L1 |
| resolution | STRING | H สำหรับสูงหรือ M สำหรับปานกลาง |
| resolution_meters | DOUBLE | ความละเอียดเป็นเมตร |
| instrumentConfigurationID | DOUBLE | รหัสการกำหนดค่าเครื่องมือ (รหัสฐานข้อมูลเรดาร์) สำหรับข้อมูลนี้ |
| missionDataTakeID | DOUBLE | รหัสที่ไม่ซ้ำกันของข้อมูลที่ถ่ายภายในภารกิจ |
| transmitterReceiverPolarisation | STRING_LIST | การโพลาไรซ์การส่ง/รับสำหรับข้อมูล มีองค์ประกอบหนึ่งรายการสำหรับแต่ละชุดค่าผสม Tx/Rx: ['VV'], ['HH'], ['VV', 'VH'] หรือ ['HH', 'HV'] |
| productClass | STRING | ส่งออกคลาสผลิตภัณฑ์ "A" สำหรับคำอธิบายประกอบหรือ "S" สำหรับมาตรฐาน |
| productClassDescription | STRING | คำอธิบายที่เป็นข้อความของคลาสผลิตภัณฑ์เอาต์พุต |
| productComposition | STRING | ประเภทองค์ประกอบของผลิตภัณฑ์นี้ "Individual" "Slice" หรือ "Assembled" |
| productType | STRING | ประเภทผลิตภัณฑ์ (ระดับการแก้ไข) ของผลิตภัณฑ์นี้ |
| productTimelinessCategory | STRING | อธิบายถึงความรวดเร็วที่จำเป็นในการประมวลผล อย่างใดอย่างหนึ่งต่อไปนี้ NRT-10m, NRT-1h, NRT-3h, Fast-24h, Off-line หรือ Reprocessing |
| sliceProductFlag | STRING | เป็นจริงหากนี่คือชิ้นส่วนจากผลิตภัณฑ์ที่ใหญ่ขึ้น หรือเป็นเท็จหากนี่คือผลิตภัณฑ์ที่สมบูรณ์ |
| segmentStartTime | DOUBLE | เวลาเริ่มต้นการตรวจจับของส่วนที่สไลซ์นี้ เป็นของ ฟิลด์นี้จะปรากฏก็ต่อเมื่อ sliceProductFlag = true |
| sliceNumber | DOUBLE | หมายเลขชิ้นส่วนที่แน่นอนของชิ้นส่วนนี้ โดยเริ่มต้นที่ 1 ฟิลด์นี้จะปรากฏก็ต่อเมื่อ sliceProductFlag = true เท่านั้น |
| totalSlices | DOUBLE | จำนวนชิ้นทั้งหมดในการถ่ายโอนข้อมูลที่สมบูรณ์ ฟิลด์นี้จะปรากฏก็ต่อเมื่อ sliceProductFlag = true เท่านั้น |
ข้อกำหนดในการใช้งาน
ข้อกำหนดในการใช้งาน
การใช้ข้อมูล Sentinel อยู่ในบังคับของข้อกำหนดและเงื่อนไขของการใช้ข้อมูล Copernicus Sentinel)
สำรวจด้วย Earth Engine
ตัวแก้ไขโค้ด (JavaScript)
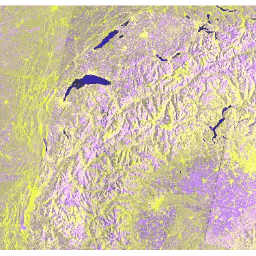
var imgVV = ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(function(image) { var edge = image.lt(-30.0); var maskedImage = image.mask().and(edge.not()); return image.updateMask(maskedImage); }); var desc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')); var asc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')); var spring = ee.Filter.date('2015-03-01', '2015-04-20'); var lateSpring = ee.Filter.date('2015-04-21', '2015-06-10'); var summer = ee.Filter.date('2015-06-11', '2015-08-31'); var descChange = ee.Image.cat( desc.filter(spring).mean(), desc.filter(lateSpring).mean(), desc.filter(summer).mean()); var ascChange = ee.Image.cat( asc.filter(spring).mean(), asc.filter(lateSpring).mean(), asc.filter(summer).mean()); Map.setCenter(5.2013, 47.3277, 12); Map.addLayer(ascChange, {min: -25, max: 5}, 'Multi-T Mean ASC', true); Map.addLayer(descChange, {min: -25, max: 5}, 'Multi-T Mean DESC', true);
import ee import geemap.core as geemap
Colab (Python)
def mask_edge(image): edge = image.lt(-30.0) masked_image = image.mask().And(edge.Not()) return image.updateMask(masked_image) img_vv = ( ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(mask_edge) ) desc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')) asc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')) spring = ee.Filter.date('2015-03-01', '2015-04-20') late_spring = ee.Filter.date('2015-04-21', '2015-06-10') summer = ee.Filter.date('2015-06-11', '2015-08-31') desc_change = ee.Image.cat( desc.filter(spring).mean(), desc.filter(late_spring).mean(), desc.filter(summer).mean(), ) asc_change = ee.Image.cat( asc.filter(spring).mean(), asc.filter(late_spring).mean(), asc.filter(summer).mean(), ) m = geemap.Map() m.set_center(5.2013, 47.3277, 12) m.add_layer(asc_change, {'min': -25, 'max': 5}, 'Multi-T Mean ASC', True) m.add_layer(desc_change, {'min': -25, 'max': 5}, 'Multi-T Mean DESC', True) m