
Для построения изохроны укажите в API начальную точку, способ передвижения (например, автомобиль, велосипед или пешком) и ограничение по времени. Вы также можете настроить параметры маршрутизации и внешний вид результирующего многоугольника.
Временной горизонт
Основное ограничение, которое вы предоставляете сервису, — это параметр travel_duration . Он определяет временной горизонт для расчета.
- Максимальная продолжительность: API поддерживает максимальное время в пути 3600 секунд (1 час) для режима
DRIVEи 7200 секунд (2 часа) для режимовWALKиBICYCLE. - Производительность: Время вычислений зависит от запрошенной продолжительности и выбранного способа передвижения. Изохрона для поездки на автомобиле, рассчитанная на один час, охватывает значительно большую географическую область и дорожную сеть, чем изохрона для пешей прогулки, рассчитанная на один час, что приводит к большей задержке при запросе на поездку на автомобиле.
- Форматирование: Поскольку API использует
google.protobuf.Duration, продолжительность должна быть отформатирована как строка, заканчивающаяся на "s" (например,"3600s"), а не как целое число.
Исходные точки и съемка дорог
Начальную точку для изохроны можно указать двумя способами:
- Координаты: пара широта и долгота (
location). - Идентификаторы мест: уникальный идентификатор для конкретного места на Google Maps (
place). При указании идентификатора места сервис использует центр этого места в качестве начальной точки. Обратите внимание, что API ожидает формат имени ресурса, напримерplaces/ChIJ.... Для получения дополнительной информации об идентификаторах мест см. раздел «Идентификаторы мест» .
Независимо от способа ввода данных, API не рассчитывает время в пути от точной физической точки, если эта точка находится не на дороге, например, внутри парка или здания. Для решения этой проблемы сервис использует привязку к дороге. Привязка к дороге имеет следующие особенности:
- Интеллектуальная привязка: сервис пытается привязать вашу исходную точку к ближайшему проходимому участку дороги.
- Учет режима движения: Логика привязки учитывает ваш
travel_mode. Если вы запрашиваетеDRIVE, API игнорирует пешеходные дорожки и ищет ближайшую улицу, по которой можно проехать на автомобиле. Если вы запрашиваетеWALK, API отдает приоритет пешеходным дорожкам и тротуарам. - Случаи сбоев: Если API не может найти подходящий участок дороги в пределах примерно 100 метров от вашей начальной точки, API возвращает ошибку
404 NOT_FOUND. Обычно это указывает на то, что точка находится слишком далеко от дорожной сети или в районе, где картографические данные не поддерживают запрошенный способ передвижения.
Направление движения (въезд или выезд)
Вы можете рассчитать доступность как для входящих, так и для исходящих направлений, используя параметр travelDirection :
-
FROM(Исходящая): Рассчитывает зону, доступную из исходящей точки в течение указанного временного лимита. Подходит для таких сценариев использования, как зоны доставки или зоны покрытия услуг. -
TO(Входящий маршрут): Рассчитывает зону, из которой можно добраться до начальной точки в течение указанного времени. Это подходит для определения зон охвата, например, откуда сотрудники могут добираться до центрального офиса.
осведомленность о дорожной ситуации
Управляйте тем, как данные о дорожном движении влияют на создаваемый полигон, с помощью параметра routing_preference :
-
TRAFFIC_UNAWARE(По умолчанию): Использует ограничения скорости и иерархию дорог для генерации полигона изохроны. Это позволяет получить детерминированную форму, которая не меняется в зависимости от времени суток. Этот параметр идеально подходит для общего анализа или планирования базовых сценариев. -
TRAFFIC_AWARE: Вычисляет изохроны, используя текущие или прогнозируемые условия дорожного движения на момент запроса, в результате чего зона доступности сужается во время заторов и расширяется в непиковые часы. Примечание: Маршрутизация с учетом дорожного движения поддерживается только в том случае, еслиtravelModeустановлен вDRIVE.
Сглаживание и точность
Вы можете настроить внешний вид и точность выходных полигонов с помощью параметров polygon_fidelity и enable_smoothing . Хотя эти параметры независимы друг от друга, они работают вместе, определяя конечную форму.
polygon_fidelity: Управляет размером базовых ячеек сетки, используемых для расчета достижимой площади.-
LOW: Использует более крупные ячейки сетки. Лучше всего подходит для покрытия больших площадей без пробелов, что позволяет получить обобщенную форму. -
MEDIUM: Сбалансированная точность. -
HIGH: Использует ячейки сетки меньшего размера. Обеспечивает более плотное прилегание к дорожной сети, но может создавать пустые участки или ямы, если дорожная сеть разреженная. -
POLYGON_FIDELITY_UNSPECIFIED: Если значение не указано, сервис динамически выбирает уровень достоверности на основе запрошенной продолжительности поездки.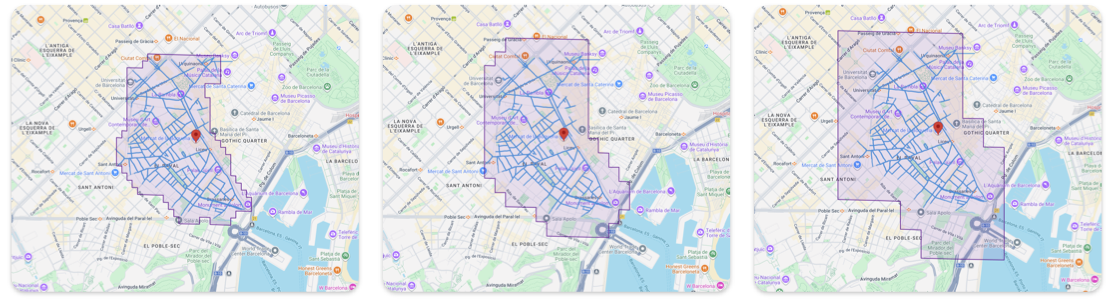
Высокая, средняя и низкая точность построения полигонов
-
enable_smoothing: Управляет тем, сглаживаются ли острые края ячеек сетки, определяемые параметром fidelity.-
false(Raw): Значение по умолчанию. Возвращает точный геометрический расчет. Края выглядят неровными или ступенчатыми. Лучше всего подходит для аналитической точности, например, для строгих проверок "точка внутри многоугольника". Меньшая задержка, чем при сглаживании. -
true(Сглаженный): Применяет алгоритм постобработки для скругления углов. Лучше всего подходит для визуального отображения на картах.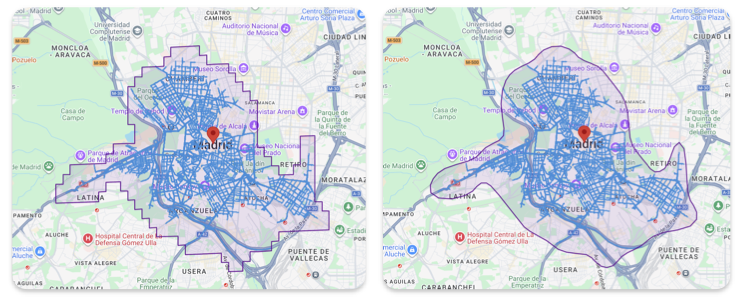
Изохрона со сглаживанием и без него
-