
Para gerar um isócrono, forneça à API uma origem, um modo de viagem, como carro, bicicleta ou caminhada, e um limite de tempo. Você também pode ajustar as preferências de roteamento e a aparência visual do polígono resultante.
Horizonte temporal
A principal restrição que você fornece ao serviço é o travel_duration. Isso define o horizonte de tempo para o cálculo.
- Duração máxima:a API aceita um tempo máximo de viagem de 3.600 segundos (1 hora) para o modo
DRIVEe de 7.200 segundos (2 horas) para os modosWALKeBICYCLE. - Performance:o tempo de cálculo é dimensionado de acordo com a duração solicitada e o modo de viagem selecionado. Uma isócrona de carro de uma hora cobre uma área geográfica e uma rede rodoviária significativamente maiores do que uma isócrona de caminhada de uma hora, o que resulta em maior latência para a solicitação de carro.
- Formatação:como a API usa
google.protobuf.Duration, a duração precisa ser formatada como uma string que termina com "s" (por exemplo,"3600s"), em vez de um número inteiro.
Pontos de origem e ajuste de vias
Você pode especificar o ponto de partida do isócrono de duas maneiras:
- Coordenadas:um par de latitude e longitude (
location). - IDs de lugar:um identificador exclusivo de um lugar específico no Google Maps (
place). Quando você fornece um ID de lugar, o serviço usa o centroide desse lugar como ponto de origem. A API espera o formato de nome do recurso, comoplaces/ChIJ.... Para mais informações sobre IDs de lugar, consulte IDs de lugar.
Independente do método de entrada, a API não calcula tempos de viagem do ponto físico exato se ele não estiver em uma via, como dentro de um parque ou um prédio. Para lidar com essa situação, o serviço usa o ajuste de rota. O ajuste à via tem os seguintes recursos:
- Ajuste inteligente:o serviço tenta ajustar seu ponto de origem ao segmento de via mais próximo que pode ser percorrido.
- Reconhecimento de modo:a lógica de ajuste considera seu
travel_mode. Se você solicitarDRIVE, a API vai ignorar caminhos exclusivos para pedestres e procurar a rua mais próxima que pode ser percorrida de carro. Se você solicitarWALK, a API vai priorizar caminhos e calçadas adequados para pedestres. - Casos de falha:se a API não encontrar um trecho de via adequado em um raio de aproximadamente 100 metros do ponto de origem, ela vai retornar um erro
404 NOT_FOUND. Isso geralmente indica que o ponto está muito longe da rede viária ou em uma área em que os dados do mapa não são compatíveis com o modo de viagem solicitado.
Direção da viagem (entrada x saída)
É possível calcular a capacidade de alcance de entrada e saída usando o parâmetro travelDirection:
FROM(saída): calcula a área alcançável do ponto de origem dentro do limite de tempo especificado. Isso é adequado para casos de uso como zonas de entrega ou cobertura de serviço.TO(entrada): calcula a área de onde é possível viajar até o ponto de origem dentro do limite de tempo especificado. Isso é adequado para determinar zonas de influência, como de onde os funcionários podem se deslocar para chegar a um escritório central.
Conscientização sobre o trânsito
Controle como as informações de trânsito influenciam o polígono gerado com o parâmetro routing_preference:
TRAFFIC_UNAWARE(padrão): usa limites de velocidade e hierarquia de vias para gerar o polígono isócrono. Isso produz uma forma determinista que não varia de acordo com a hora do dia. Esse parâmetro é ideal para análise geral ou planejamento de cenários de base.TRAFFIC_AWARE:calcula isócronas usando condições de trânsito em tempo real ou preditivas no momento da solicitação, fazendo com que a área acessível diminua durante o congestionamento e aumente durante os horários de menor movimento. Observação:o roteamento com reconhecimento de tráfego só é compatível quandotravelModeestá definido comoDRIVE.
Suavização e fidelidade
É possível personalizar a aparência e a precisão dos polígonos de saída usando os parâmetros
polygon_fidelity e enable_smoothing. Embora essas opções sejam independentes, elas trabalham juntas para determinar a forma final.
polygon_fidelity:controla o tamanho das células da grade usadas para calcular a área alcançável.LOW:usa células de grade maiores. Ideal para cobrir grandes áreas sem lacunas, resultando em uma forma generalizada.MEDIUM:precisão balanceada.HIGH:usa células de grade menores. Resulta em um ajuste mais preciso à rede viária, mas pode produzir áreas vazias ou buracos se a rede viária for esparsa.POLYGON_FIDELITY_UNSPECIFIED:se não for especificado, o serviço vai selecionar dinamicamente a fidelidade com base na duração da viagem solicitada.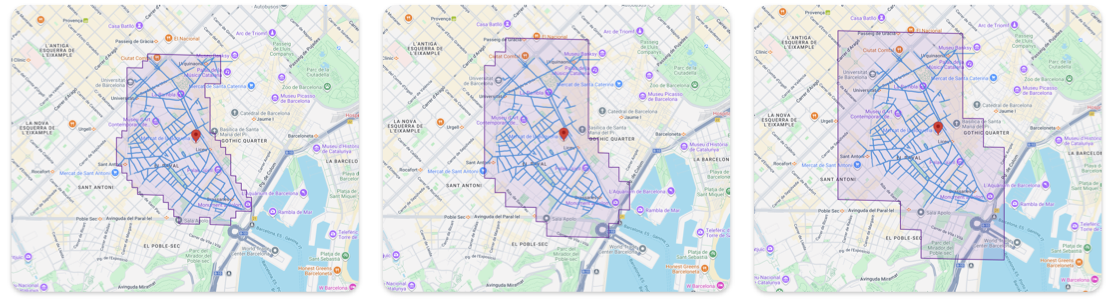
Fidelidade de polígonos alta, média e baixa
enable_smoothing:controla se as bordas das células da grade definidas pela fidelidade são arredondadas.false(bruto): o padrão. Retorna o cálculo geométrico exato. As bordas parecem irregulares ou em degraus. Ideal para precisão analítica, como testes rigorosos de ponto em polígono. Latência menor do que a suavizada.true(suavizado): aplica um algoritmo de pós-processamento para arredondar os cantos. Ideal para exibição visual em mapas.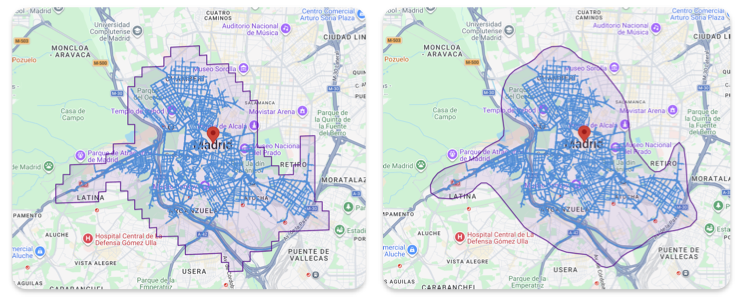
Isócrona com e sem suavização