
Pour générer une isochrone, fournissez à l'API une origine, un mode de transport tel que la voiture, le vélo ou la marche, et une limite de temps. Vous pouvez également ajuster les préférences de routage et l'apparence visuelle du polygone obtenu.
Horizon temporel
La contrainte principale que vous fournissez au service est travel_duration. Cela définit l'horizon temporel du calcul.
- Durée maximale : l'API accepte une durée de trajet maximale de 3 600 secondes (1 heure) pour le mode
DRIVEet de 7 200 secondes (2 heures) pour les modesWALKetBICYCLE. - Performances : le temps de calcul est proportionnel à la durée demandée et au mode de déplacement sélectionné. Un isochrone de conduite d'une heure couvre une zone géographique et un réseau routier beaucoup plus vastes qu'un isochrone de marche d'une heure, ce qui entraîne une latence plus élevée pour la requête de conduite.
- Mise en forme : comme l'API utilise
google.protobuf.Duration, la durée doit être mise en forme sous forme de chaîne se terminant par un "s" (par exemple,"3600s") plutôt que sous forme d'entier.
Points d'origine et accrochage aux routes
Vous pouvez spécifier le point de départ de l'isochrone de deux manières :
- Coordonnées : paire de latitude et de longitude (
location). - ID de lieu : identifiant unique d'un lieu spécifique sur Google Maps (
place). Lorsque vous fournissez un ID de lieu, le service utilise le centroïde de ce lieu comme point d'origine. Notez que l'API attend le format du nom de la ressource, tel queplaces/ChIJ.... Pour en savoir plus sur les ID de lieu, consultez ID de lieu.
Quelle que soit la méthode d'entrée, l'API ne calcule pas les temps de trajet à partir du point physique exact si ce point ne se trouve pas sur une route, par exemple à l'intérieur d'un parc ou d'un bâtiment. Pour gérer cette situation, le service utilise l'accrochage aux routes. L'accrochage à la route présente les caractéristiques suivantes :
- Magnétisme intelligent : le service tente de magnétiser votre point de départ sur le segment de route praticable le plus proche.
- Conscience du mode : la logique d'accrochage tient compte de votre
travel_mode. Si vous demandezDRIVE, l'API ignore les chemins réservés aux piétons et recherche la rue carrossable la plus proche. Si vous demandezWALK, l'API privilégie les chemins et les trottoirs praticables à pied. - Cas d'échec : si l'API ne trouve pas de segment de route approprié à environ 100 mètres de votre point de départ, elle renvoie une erreur
404 NOT_FOUND. Cela indique généralement que le point est trop éloigné du réseau routier ou qu'il se trouve dans une zone où les données cartographiques ne sont pas compatibles avec le mode de déplacement demandé.
Sens du trajet (entrant ou sortant)
Vous pouvez calculer l'accessibilité entrante et sortante à l'aide du paramètre travelDirection :
FROM(sortant) : calcule la zone accessible depuis le point d'origine dans le délai spécifié. Cela convient aux cas d'utilisation tels que les zones de livraison ou la couverture du service.TO(entrant) : calcule la zone à partir de laquelle vous pouvez vous rendre à un point d'origine dans le délai spécifié. Cette option est utile pour déterminer les zones de chalandise, par exemple les lieux de résidence des employés qui peuvent se rendre dans un bureau central.
Sensibilisation au trafic
Contrôlez l'influence des données de trafic sur le polygone généré à l'aide du paramètre routing_preference :
TRAFFIC_UNAWARE(par défaut) : utilise les limitations de vitesse et la hiérarchie des routes pour générer le polygone isochrone. Cela produit une forme déterministe qui ne fluctue pas en fonction de l'heure de la journée. Ce paramètre est idéal pour l'analyse générale ou la planification de scénarios de référence.TRAFFIC_AWARE: calcule les isochrones en utilisant les conditions de trafic en temps réel ou prédictives au moment de la requête. La zone accessible se réduit en cas d'embouteillages et s'étend en dehors des heures de pointe. Remarque : Le routage tenant compte du trafic n'est compatible que lorsquetravelModeest défini surDRIVE.
Lissage et fidélité
Vous pouvez personnaliser l'apparence et la précision des polygones de sortie à l'aide des paramètres polygon_fidelity et enable_smoothing. Bien que ces options soient indépendantes, elles fonctionnent ensemble pour déterminer la forme finale.
polygon_fidelity: contrôle la taille des cellules de grille sous-jacentes utilisées pour calculer la zone accessible.LOW: utilise des cellules de grille plus grandes. Idéal pour couvrir de grandes zones sans lacunes, ce qui permet d'obtenir une forme généralisée.MEDIUM: précision équilibrée.HIGH: utilise des cellules de grille plus petites. Permet un ajustement plus précis au réseau routier, mais peut produire des zones vides ou des trous si le réseau routier est clairsemé.POLYGON_FIDELITY_UNSPECIFIED: si aucune valeur n'est spécifiée, le service sélectionne dynamiquement la fidélité en fonction de la durée du trajet demandée.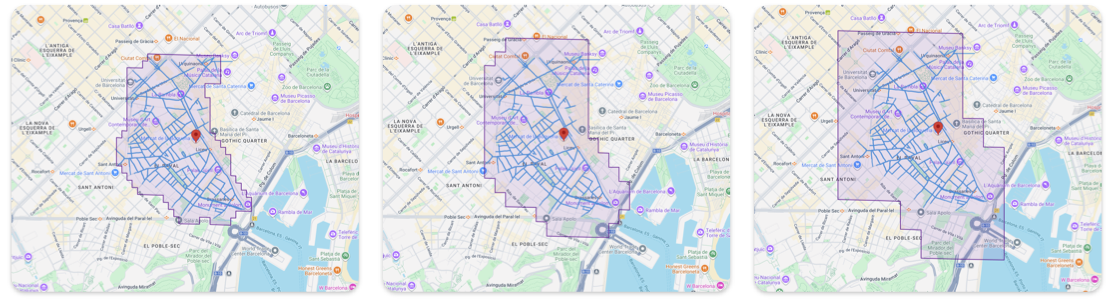
Fidélité des polygones élevée, moyenne et faible
enable_smoothing: contrôle si les bords nets des cellules de la grille définies par la fidélité sont arrondis.false(brut) : valeur par défaut. Renvoie le calcul géométrique exact. Les bords semblent irréguliers ou en escalier. Idéal pour la précision analytique, comme les tests stricts point-in-polygon. Latence inférieure à celle de la version lissée.true(Lissé) : applique un algorithme de post-traitement pour arrondir les angles. Idéal pour l'affichage visuel sur les cartes.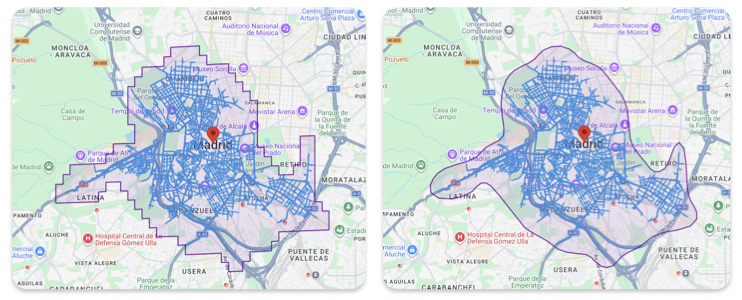
Isochrone avec et sans lissage