Bu sayfada, resim modelleriyle ilgili terimler yer almaktadır. Tüm terimler için burayı tıklayın.
A
artırılmış gerçeklik
Kullanıcının gerçek dünyaya bakışını bilgisayar tarafından oluşturulmuş bir görüntüyle birleştirerek birleştirilmiş bir görüntü sunan teknoloji.
otomatik kodlayıcı
Girişten en önemli bilgileri çıkarmayı öğrenen bir sistem. Otomatik kodlayıcılar, kodlayıcı ve kod çözücü kombinasyonudur. Otomatik kodlayıcılar aşağıdaki iki adımlı süreci kullanır:
- Kodlayıcı, girişi (genellikle) kayıplı, daha düşük boyutlu (ara) bir biçimle eşler.
- Kod çözücü, düşük boyutlu biçimi orijinal yüksek boyutlu giriş biçimiyle eşleyerek orijinal girişin kayıplı bir sürümünü oluşturur.
Otomatik kodlayıcılar, kod çözücünün kodlayıcının ara biçimindeki orijinal girişi mümkün olduğunca yakın bir şekilde yeniden oluşturmaya çalışmasıyla uçtan uca eğitilir. Ara biçimi orijinal biçime kıyasla daha küçük (düşük boyutlu) olduğundan, otomatik kodlayıcı, girişteki hangi bilgilerin önemli olduğunu öğrenmek zorunda kalır ve çıkış, girişle tamamen aynı olmaz.
Örneğin:
- Giriş verileri bir grafikse tam olmayan kopya, orijinal grafiğe benzer ancak biraz değiştirilmiş olur. Tam olarak aynı olmayan kopya, orijinal grafikteki gürültüyü kaldırıyor veya eksik pikselleri dolduruyor olabilir.
- Giriş verileri metinse otomatik kodlayıcı, orijinal metni taklit eden (ancak aynı olmayan) yeni bir metin oluşturur.
Varyasyonel otomatik kodlayıcılar hakkında da bilgi edinin.
otoregresif model
Kendi önceki tahminlerine dayanarak tahminde bulunan bir model. Örneğin, otomatik geriye dönük dil modelleri, daha önce tahmin edilen jetonlara göre bir sonraki jetonu tahmin eder. Transformer tabanlı tüm büyük dil modelleri otomatik geriye dönüktür.
Buna karşılık, GAN tabanlı görüntü modelleri genellikle otomatik regresif değildir. Bunun nedeni, bu modellerin bir resmi adım adım iteratif olarak değil, tek bir ileri geçişte oluşturmasıdır. Ancak belirli resim oluşturma modelleri, resimleri adım adım oluşturdukları için otomatik regresif olurlar.
B
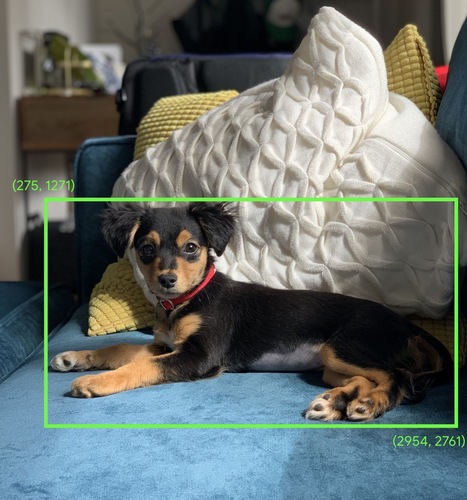
sınırlayıcı kutu
Bir resimde, ilgilenilen bir alan (ör. aşağıdaki resimdeki köpek) etrafındaki dikdörtgenin (x, y) koordinatları.
C
konvolüsyon
Matematikte, iki işlevin karışımı olarak tanımlanabilir. Makine öğrenimindeki bir topoloji, ağırlıkları eğitmek için topolojik filtreyi ve giriş matrisini karıştırır.
Makine öğrenimindeki "dönüşüm" terimi genellikle dönüşüm işlemine veya dönüşüm katmanına atıfta bulunmanın kısa bir yoludur.
Devrimler olmadan, bir makine öğrenimi algoritmasının büyük bir tenzor içindeki her hücre için ayrı bir ağırlık öğrenmesi gerekir. Örneğin, 2K x 2K resimlerle eğitilen bir makine öğrenimi algoritması 4 milyon ayrı ağırlık bulmak zorunda kalır. Devrimler sayesinde, makine öğrenimi algoritmasının yalnızca dönüşüm filtresindeki her hücrenin ağırlığını bulması gerekir. Bu da modeli eğitmek için gereken bellek miktarını önemli ölçüde azaltır. Devrimsel filtre uygulandığında, hücreler arasında kopyalanır ve her hücre filtreyle çarpılır.
Daha fazla bilgi için Resim Sınıflandırması kursundaki Derin Öğrenme ile Konvolüsyonel Sinir Ağları başlıklı makaleyi inceleyin.
konvolüsyon filtresi
Dönüşüm işlemi'ndeki iki aktörden biri. (Diğer aktör, bir giriş matrisinin bir dilimidir.) Devrimsel filtre, giriş matrisiyle aynı sırayı ancak daha küçük bir şekle sahip bir matristir. Örneğin, 28x28 boyutunda bir giriş matrisi verildiğinde filtre, 28x28'den küçük herhangi bir 2D matris olabilir.
Fotoğrafta oynama işleminde, birleştirme filtresindeki tüm hücreler genellikle sabit bir birler ve sıfırlar desenine ayarlanır. Makine öğrenimindeki convolutional filtreler genellikle rastgele sayılarla başlatılır ve ardından ağ ideal değerleri eğitir.
Daha fazla bilgi için Resim Sınıflandırması kursunda Dönüşüm konusuna bakın.
konvolüsyon katmanı
Evrişimli filtrenin bir giriş matrisinden geçtiği derin nöral ağ katmanı. Örneğin, aşağıdaki 3x3 dönüşüm filtresini ele alalım:
![Aşağıdaki değerleri içeren 3x3 boyutunda bir matris: [[0,1,0], [1,0,1], [0,1,0]]](https://developers.google.com/static/machine-learning/glossary/images/ConvolutionalFilter33.svg?authuser=1&hl=tr)
Aşağıdaki animasyonda, 5x5 giriş matrisini içeren 9 evrişim işleminden oluşan bir evrişim katmanı gösterilmektedir. Her konvolusyon işleminin, giriş matrisinin farklı bir 3x3 dilimiyle çalıştığını unutmayın. Elde edilen 3x3 matris (sağda), 9 ardışık işlem sonucu oluşur:
![İki matrisi gösteren animasyon. İlk matris 5x5 matristir: [[128,97,53,201,198], [35,22,25,200,195],
[37,24,28,197,182], [33,28,92,195,179], [31,40,100,192,177]].
İkinci matris 3x3 matristir:
[[181,303,618], [115,338,605], [169,351,560]].
İkinci matris, 5x5 matrisin farklı 3x3 alt kümelerine [[0, 1, 0], [1, 0, 1], [0, 1, 0]] convolutional filtresi uygulanarak hesaplanır.](https://developers.google.com/static/machine-learning/glossary/images/AnimatedConvolution.gif?authuser=1&hl=tr)
Daha fazla bilgi için Resim Sınıflandırma kursundaki Tam Bağlantılı Katmanlar bölümüne bakın.
evrişimli nöral ağ
En az bir katmanının evrişimli katman olduğu bir nöral ağ. Tipik bir konvolüsyonal sinir ağı, aşağıdaki katmanların bir kombinasyonundan oluşur:
Devrimsel sinir ağları, görüntü tanıma gibi belirli türde sorunlarda büyük başarılar elde etmiştir.
konvolüsyon işlemi
Aşağıdaki iki adımlı matematiksel işlem:
- Dönüşüm filtresinin ve giriş matrisinin bir diliminin öğe bazında çarpımı. (Giriş matrisinin dilimi, konvolusyon filtresiyle aynı rütbeye ve boyuta sahiptir.)
- Elde edilen ürün matrisindeki tüm değerlerin toplamı.
Örneğin, aşağıdaki 5x5 giriş matrisini ele alalım:
![5x5 matris: [[128,97,53,201,198], [35,22,25,200,195],
[37,24,28,197,182], [33,28,92,195,179], [31,40,100,192,177]].](https://developers.google.com/static/machine-learning/glossary/images/ConvolutionalLayerInputMatrix.svg?authuser=1&hl=tr)
Şimdi aşağıdaki 2x2 boyutunda bir konvolusyon filtresi olduğunu varsayalım:
![2x2 matrisi: [[1, 0], [0, 1]]](https://developers.google.com/static/machine-learning/glossary/images/ConvolutionalLayerFilter.svg?authuser=1&hl=tr)
Her konvolusyon işlemi, giriş matrisinin tek bir 2x2 diliminden oluşur. Örneğin, giriş matrisinin sol üst kısmındaki 2x2 dilimi kullandığımızı varsayalım. Bu nedenle, bu dilimdeki toplama işlemi aşağıdaki gibi görünür:
![Giriş matrisinin sol üstteki 2x2 bölümüne [[1, 0], [0, 1]] konvolusyon filtresinin uygulanması. Bu bölüm [[128,97], [35,22]] şeklindedir.
Devrimsel filtre, 128 ve 22 değerlerini olduğu gibi bırakır ancak 97 ve 35 değerlerini sıfıra Sonuç olarak, toplama işlemi 150 (128+22) değerini verir.](https://developers.google.com/static/machine-learning/glossary/images/ConvolutionalLayerOperation.svg?authuser=1&hl=tr)
Dönüşüm katmanı, her biri giriş matrisinin farklı bir diliminde çalışan bir dizi dönüşüm işleminden oluşur.
D
Veri artırma
Mevcut örneklerin dönüştürülmesiyle ek örnekler oluşturmak için eğitim örneklerinin aralığını ve sayısını yapay olarak artırma. Örneğin, resimlerin özelliklerinizden biri olduğunu ancak veri kümenizin, modelin yararlı ilişkilendirmeler öğrenmesi için yeterli resim örneği içermediğini varsayalım. İdeal olarak, modelinizin düzgün bir şekilde eğitilebilmesi için veri kümenize yeterli miktarda etiketlenmiş resim eklemeniz gerekir. Bu mümkün değilse veri artırma, her resmi döndürerek, uzatarak ve yansıtarak orijinal resmin birçok varyantını oluşturabilir. Bu sayede, mükemmel bir eğitim için yeterli sayıda etiketli veri elde edebilirsiniz.
derinlik yönünde ayrılabilir evrişimli nöral ağ (sepCNN)
Inception'a dayalı ancak Inception modüllerinin derinlik yönünde ayrılabilir konvolusyonlarla değiştirildiği bir konvolüsyonel nöral ağ mimarisi. Xception olarak da bilinir.
Derinlik yönünde ayrılabilir birleştirme (ayrıca ayrılabilir birleştirme olarak kısaltılır), standart bir 3D birleştirme işlemini daha hesaplama açısından verimli olan iki ayrı birleştirme işlemine ayırır: birincisi, 1 derinliğe (n ✕ n ✕ 1) sahip derinlik yönünde birleştirme, ikincisi ise 1 uzunluk ve genişliğe (1 ✕ 1 ✕ n) sahip noktasal birleştirme.
Daha fazla bilgi için Xception: Depthwise Separable Convolutions ile Derin Öğrenme başlıklı makaleyi inceleyin.
downsampling
Aşağıdakilerden biri anlamına gelebilecek aşırı yüklenmiş terim:
- Bir modeli daha verimli bir şekilde eğitmek için özellikteki bilgi miktarını azaltma. Örneğin, bir resim tanıma modelini eğitmeden önce yüksek çözünürlüklü resimleri daha düşük çözünürlüklü bir biçime indirgeme.
- Yeterince temsil edilmeyen sınıflarda model eğitimini iyileştirmek için sınıf örneklerinin orantısız olarak düşük bir yüzdesiyle eğitim Örneğin, sınıf dengesi bozuk bir veri kümesinde modeller çoğunluk sınıfı hakkında çok şey öğrenir ve azınlık sınıfı hakkında yeterince bilgi edinmez. Örnek sayısını azaltmak, çoğunluk ve azınlık sınıflarındaki eğitim miktarını dengelemeye yardımcı olur.
Daha fazla bilgi için Makine Öğrenimi Hızlandırılmış Kursu'ndaki Veri kümeleri: Dengesiz veri kümeleri bölümüne bakın.
C
ince ayar
Önceden eğitilmiş bir modelde, belirli bir kullanım alanı için parametrelerini hassaslaştırmak amacıyla göreve özel ikinci bir eğitim geçişi. Örneğin, bazı büyük dil modelleri için tam eğitim sırası aşağıdaki gibidir:
- Ön eğitim: Büyük bir dil modelini, tüm İngilizce Wikipedia sayfaları gibi geniş bir genel veri kümesiyle eğitin.
- İnce ayarlama: Önceden eğitilmiş modeli, tıbbi sorgulara yanıt vermek gibi belirli bir görevi gerçekleştirecek şekilde eğitin. İnce ayar genellikle belirli göreve odaklanan yüzlerce veya binlerce örnek içerir.
Başka bir örnek olarak, büyük bir resim modeli için tam eğitim sırası aşağıda verilmiştir:
- Ön eğitim: Wikimedia Commons'taki tüm resimler gibi geniş bir genel resim veri kümesinde büyük bir resim modeli eğitin.
- İnce ayarlama: Önceden eğitilmiş modeli, orka resimleri oluşturma gibi belirli bir görevi gerçekleştirecek şekilde eğitin.
İnce ayar, aşağıdaki stratejilerin herhangi bir kombinasyonunu içerebilir:
- Önceden eğitilmiş modelin mevcut parametrelerinin tümünü değiştirme Buna bazen tam hassas ayar da denir.
- Önceden eğitilmiş modelin mevcut parametrelerinin yalnızca bir kısmını (genellikle çıktı katmanına en yakın katmanlar) değiştirirken diğer mevcut parametreleri (genellikle giriş katmanına en yakın katmanlar) değiştirmeden bırakma Parametreleri verimli şekilde kullanma başlıklı makaleyi inceleyin.
- Genellikle çıkış katmanına en yakın mevcut katmanların üzerine daha fazla katman ekleme.
İnce ayar, transfer öğrenimi biçimlerinden biridir. Bu nedenle, hassas ayarlama işleminde, önceden eğitilmiş modeli eğitmek için kullanılanlardan farklı bir kayıp işlevi veya farklı bir model türü kullanılabilir. Örneğin, önceden eğitilmiş büyük bir resim modelinde ince ayar yaparak giriş resmindeki kuş sayısını döndüren bir regresyon modeli oluşturabilirsiniz.
İnce ayarlama ile aşağıdaki terimleri karşılaştırın:
Daha fazla bilgi için Makine Öğrenimi Hızlandırılmış Kursu'ndaki İnce ayarlama bölümüne bakın.
G
Gemini
Google'ın en gelişmiş yapay zekasını içeren ekosistem. Bu ekosistemin öğeleri şunlardır:
- Çeşitli Gemini modelleri.
- Gemini modelinin etkileşimli sohbet arayüzü. Kullanıcılar istemler yazar ve Gemini bu istemlere yanıt verir.
- Çeşitli Gemini API'leri.
- Gemini modellerine dayalı çeşitli işletme ürünleri (ör. Google Cloud için Gemini).
Gemini modelleri
Google'ın son teknoloji Transformer tabanlı çoklu modal modelleri. Gemini modelleri, özellikle müşteri temsilcileriyle entegre edilecek şekilde tasarlanmıştır.
Kullanıcılar, etkileşimli bir iletişim arayüzü ve SDK'lar dahil olmak üzere çeşitli şekillerde Gemini modelleriyle etkileşim kurabilir.
üretken yapay zeka
Resmi bir tanımı olmayan, yeni ve dönüştürücü bir alan. Bununla birlikte, çoğu uzman üretken yapay zeka modellerinin aşağıdakilerin tümünü içeren içerikler oluşturabileceği ("üretebildiği") konusunda hemfikirdir:
- karmaşık
- tutarlı
- orijinal
Örneğin, üretken yapay zeka modelleri karmaşık makaleler veya resimler oluşturabilir.
LSTM'ler ve RNN'ler de dahil olmak üzere bazı eski teknolojiler özgün ve tutarlı içerikler oluşturabilir. Bazı uzmanlar bu eski teknolojileri üretken yapay zeka olarak görürken diğerleri, gerçek üretken yapay zekanın bu eski teknolojilerin üretebileceğinden daha karmaşık bir çıktı gerektirdiğini düşünüyor.
Tahmine dayalı makine öğrenimi ile karşılaştırın.
I
resim tanıma
Bir resimdeki nesneleri, kalıpları veya kavramları sınıflandıran bir işlem. Görüntü tanıma, resim sınıflandırması olarak da bilinir.
Daha fazla bilgi için ML Practicum: Image Classification başlıklı makaleyi inceleyin.
Daha fazla bilgi için ML Practicum: Image Classification kursuna göz atın.
kesişim bölü birleşim (IoU)
İki kümenin kesişiminin, birleşimlerine bölümü. Makine öğrenimi görüntü algılama görevlerinde IoU, modelin tahmin edilen sınırlayıcı kutusunun kesin referans sınırlayıcı kutusuna göre doğruluğunu ölçmek için kullanılır. Bu durumda, iki kutunun IoU'su çakışma alanı ile toplam alan arasındaki orandır ve değeri 0 (tahmini sınırlayıcı kutu ile kesin referans sınırlayıcı kutusu arasında çakışma yok) ile 1 (tahmini sınırlayıcı kutu ile kesin referans sınırlayıcı kutusu tam olarak aynı koordinatlara sahip) arasında değişir.
Örneğin, aşağıdaki resimde:
- Tahmin edilen sınırlayıcı kutu (modelin, resimdeki gece masasının bulunduğu yeri tahmin ettiği koordinatlar), mor renkle belirtilir.
- Kesin referans sınır kutusu (resimdeki gece masasının gerçekte bulunduğu yeri sınırlayan koordinatlar), yeşil renkle belirtilir.
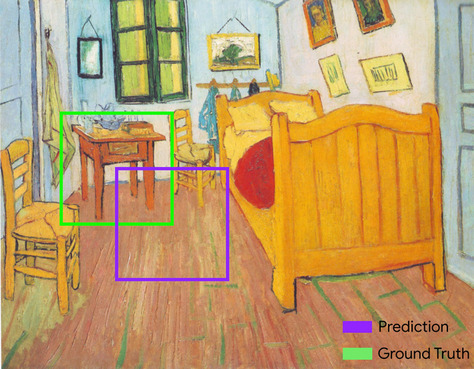
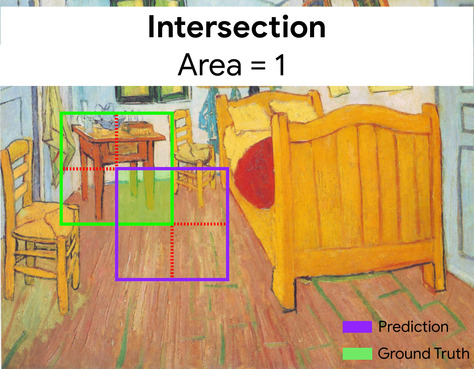
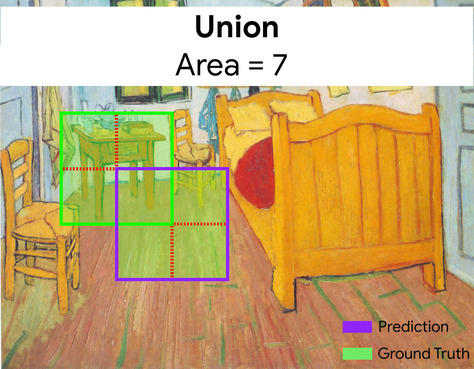
Burada, tahmin ve kesin referans için sınırlayıcı kutuların kesişimi (sol altta) 1, tahmin ve kesin referans için sınırlayıcı kutuların birleşimi (sağ altta) 7 olduğundan IoU \(\frac{1}{7}\)'tür.
K
önemli noktalar
Bir resimdeki belirli özelliklerin koordinatları. Örneğin, çiçek türlerini ayırt eden bir resim tanıma modelinde anahtar noktalar her bir taç yaprağın ortası, sap, erkek organ vb. olabilir.
L
önemli noktalar
Önemli noktalar ile eş anlamlıdır.
M
MMIT
Çok modlu talimat ayarlı kısaltması.
MNIST
LeCun, Cortes ve Burges tarafından derlenen, 60.000 resim içeren herkese açık bir veri kümesi. Her resimde, bir kişinin 0-9 arasındaki belirli bir rakamı manuel olarak nasıl yazdığı gösterilir. Her resim, 28x28 tam sayı dizisi olarak depolanır. Her tam sayı, 0 ile 255 (ikisi de dahil) arasında bir gri tonlama değeridir.
MNIST, makine öğrenimi için kurallı bir veri kümesidir ve genellikle yeni makine öğrenimi yaklaşımlarını test etmek için kullanılır. Ayrıntılar için El Yazısıyla Gösterilen Rakamlar İçin MNIST Veritabanı başlıklı makaleyi inceleyin.
MOE
Uzmanlardan oluşan bir grup kısaltması.
P
havuz oluşturma
Daha önceki bir dönüşüm katmanı tarafından oluşturulan bir matrisi (veya matrisleri) daha küçük bir matrise indirgeme. Birleştirme işlemi genellikle birleştirilen alandaki maksimum veya ortalama değeri almayı içerir. Örneğin, aşağıdaki 3x3 matrise sahip olduğumuzu varsayalım:
![3x3 matris [[5,3,1], [8,2,5], [9,4,3]].](https://developers.google.com/static/machine-learning/glossary/images/PoolingStart.svg?authuser=1&hl=tr)
Havuzlama işlemi, tıpkı evrişim işlemi gibi matrisi dilimlere ayırır ve ardından bu evrişim işlemini adım boyutunda kaydırır. Örneğin, toplama işleminin, 1x1 adımla birlikte konvolüsyon matrisini 2x2 dilime böldüğünü varsayalım. Aşağıdaki şemada gösterildiği gibi dört birleştirme işlemi gerçekleşir. Her bir toplama işleminin, ilgili dilimdeki dört değerden en yüksek değeri seçtiğini varsayalım:
![Giriş matrisi, şu değerleri içeren 3x3 boyutundadır: [[5,3,1], [8,2,5], [9,4,3]].
Giriş matrisinin sol üstteki 2x2 alt matrisi [[5,3], [8,2]] olduğundan, sol üstteki toplama işlemi 8 değerini verir (5, 3, 8 ve 2'nin maksimum değeridir). Giriş matrisinin sağ üst 2x2 alt matrisi [[3,1], [2,5]] olduğundan sağ üst toplama işlemi 5 değerini verir. Giriş matrisinin sol alt 2x2 alt matrisi şu şekildedir:
[[8,2], [9,4]], bu nedenle sol alt toplama işlemi 9 değerini verir. Giriş matrisinin sağ alt 2x2 alt matrisi şu şekildedir:
[[2,5], [4,3]], bu nedenle sağ alt toplama işlemi 5 değerini verir. Özet olarak, toplama işlemi 2x2 matrisi verir:
[[8,5], [9,5]].](https://developers.google.com/static/machine-learning/glossary/images/PoolingConvolution.svg?authuser=1&hl=tr)
Toplama, giriş matrisinde döndürme değişmezliğini zorunlu kılmaya yardımcı olur.
Görsel uygulamalar için toplama işlemi, daha resmi bir şekilde uzamsal toplama olarak bilinir. Zaman serisi uygulamaları genellikle birleştirme işlemini zamansal birleştirme olarak adlandırır. Toplama işlemine genellikle alt örnekleme veya az örnekleme denir.
ML Practicum: Görüntü Sınıflandırma kursundaki Konvolüsyonel Nöral Ağlar ile Tanışın bölümüne bakın.
eğitilmiş model
Genellikle aşağıdakilerden biri veya daha fazlası gibi bazı son işlemlerden geçmiş önceden eğitilmiş bir modeli ifade eden, gevşek tanımlanmış bir terimdir:
önceden eğitilmiş model
Genellikle, eğitilmiş bir modeldir. Bu terim, daha önce eğitilmiş bir gömülü vektör anlamına da gelebilir.
Önceden eğitilmiş dil modeli terimi genellikle önceden eğitilmiş bir büyük dil modelini ifade eder.
ön eğitim
Bir modelin büyük bir veri kümesinde ilk eğitimi. Bazı önceden eğitilmiş modeller hantal devler gibidir ve genellikle ek eğitimle hassaslaştırılması gerekir. Örneğin, makine öğrenimi uzmanları, Wikipedia'daki tüm İngilizce sayfalar gibi geniş bir metin veri kümesinde büyük dil modelini önceden eğitebilir. Ön eğitimden sonra, elde edilen model aşağıdaki tekniklerden herhangi biri kullanılarak daha da hassaslaştırılabilir:
K
dönme değişmezliği
Görüntü sınıflandırma probleminde, algoritmanın görüntünün yönü değişse bile resimleri başarılı bir şekilde sınıflandırma yeteneği. Örneğin, algoritma bir tenis raketini yukarı, yana veya aşağı bakıyor olsa bile tanımlayabilir. Dönme değişmezliğinin her zaman istenmediğini unutmayın. Örneğin, ters çevrilmiş bir 9 rakamı 9 olarak sınıflandırılmamalıdır.
Döndürme değişmezliği ve boyut değişmezliği hakkında da bilgi edinin.
S
boyut değişmezliği
Görüntü sınıflandırma probleminde, algoritmanın resmin boyutu değişse bile resimleri başarılı bir şekilde sınıflandırma yeteneği. Örneğin, algoritma 2 milyon piksel veya 200 bin piksel tüketse de kediyi tanımlayabilir. En iyi görüntü sınıflandırma algoritmalarının bile boyut değişmezliği konusunda pratik sınırlamaları olduğunu unutmayın. Örneğin, bir algoritmanın (veya kullanıcının) yalnızca 20 piksellik bir kedi resmini doğru şekilde sınıflandırması pek olası değildir.
Döndürme invaryantlığı ve dönme invaryantlığı hakkında da bilgi edinin.
Daha fazla bilgi için Gruplandırma kursuna bakın.
mekansal toplama
Birleştirme konusuna bakın.
stride
Bir konvolusyon işleminde veya toplama işleminde, sonraki giriş dilimi serisinin her boyutundaki delta. Örneğin, aşağıdaki animasyonda bir konvolusyon işlemi sırasında (1,1) adım gösterilmektedir. Bu nedenle, sonraki giriş dilimi bir önceki giriş diliminin sağındaki konumdan başlar. İşlem sağ kenara ulaştığında bir sonraki dilim tamamen sola, ancak bir konum aşağıya yerleştirilir.
Önceki örnekte iki boyutlu bir adım gösterilmektedir. Giriş matrisi üç boyutluysa adım da üç boyutlu olur.
alt örnekleme
Birleştirme konusuna bakın.
T
sıcaklık
Bir modelin çıkışının rastgelelik derecesini kontrol eden hiper parametre. Yüksek sıcaklıklar daha rastgele sonuçlara, düşük sıcaklıklar ise daha az rastgele sonuçlara yol açar.
En iyi sıcaklığı seçmek, uygulamaya ve modelin çıktısının tercih edilen özelliklerine bağlıdır. Örneğin, reklam öğesi çıkışı oluşturan bir uygulama oluştururken sıcaklığı artırmanız muhtemeldir. Buna karşılık, modelin doğruluğunu ve tutarlılığını artırmak için resimleri veya metni sınıflandıran bir model oluştururken sıcaklığı düşürmeniz muhtemeldir.
Sıcaklık genellikle softmax ile birlikte kullanılır.
çeviri değişmezliği
Görüntü sınıflandırma probleminde, algoritmanın resimdeki nesnelerin konumu değişse bile resimleri başarılı bir şekilde sınıflandırma yeteneği. Örneğin, algoritma, çerçevenin ortasında veya sol ucunda olsun fark etmeksizin köpeği tanımlayabilir.
Boyut sabitliği ve dönme sabitliği hakkında da bilgi edinin.