ভূমিকা
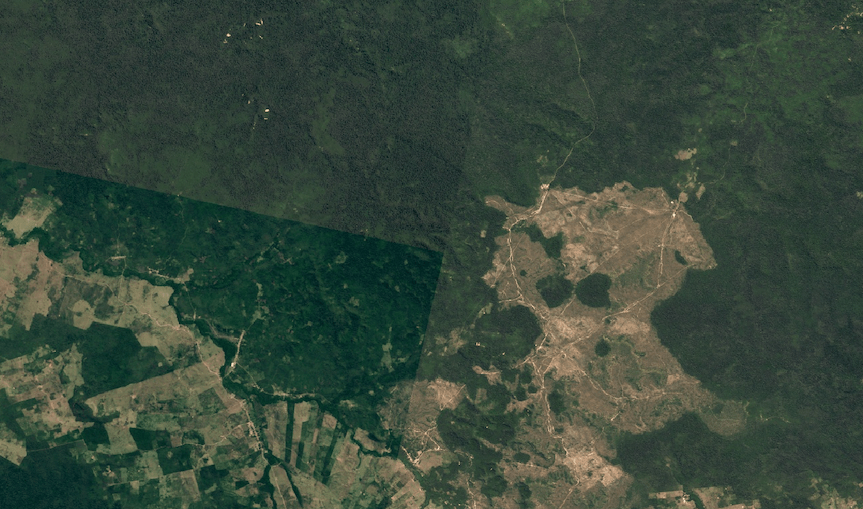
ব্রাজিল বন আইন বাস্তবায়ন এবং ব্যক্তিগত মালিকানাধীন বনভূমি সুরক্ষার জন্য ব্রাজিল সরকারের প্রচেষ্টাকে সমর্থন জানিয়ে, গুগল SPOT স্যাটেলাইট পর্যবেক্ষণের উপর ভিত্তি করে দুটি বেসম্যাপ তৈরি করেছে: একটি ভিজ্যুয়াল বেসম্যাপ এবং একটি অ্যানালিটিক বেসম্যাপ (G-BFID v1.0)।
এই মোজাইক করা চিত্রগুলো ২২শে জুলাই, ২০০৮-এর জন্য একটি ভিত্তিরেখা স্থাপন করে, যা ব্রাজিলের বন আইন অনুযায়ী 'একীভূত এলাকা'—অর্থাৎ পূর্বে থেকেই মানুষের বসতি বা কৃষি কাজে ব্যবহৃত অঞ্চল—শনাক্ত করার জন্য একটি গুরুত্বপূর্ণ তারিখ। SPOT স্যাটেলাইট আর্কাইভ থেকে প্রাপ্ত এই মোজাইক ডেটাসেটগুলো, এই ভিত্তিরেখা স্থাপনের জন্য ঐতিহ্যগতভাবে ব্যবহৃত ৩০-মিটার ল্যান্ডস্যাট ডেটার একটি উচ্চতর রেজোলিউশনের বিকল্প প্রদান করে।
হাজার হাজার SPOT চিত্রকে সংশ্লেষণ করে একীভূত বেসম্যাপ তৈরি করার জন্য, চিত্রাবলী একটি প্রক্রিয়াকরণ পদ্ধতির মধ্য দিয়ে গেছে, যার মধ্যে অন্তর্ভুক্ত ছিল:
- কম্প্রেশন আর্টিফ্যাক্ট দূর করার জন্য প্রান্তের সূক্ষ্মকরণ ।
- ল্যান্ডস্যাট বেসলাইনের সাপেক্ষে রেডিওমেট্রিক স্বাভাবিকীকরণ ।
- ক্লাউড মাস্কিং (রক্ষণশীল, ম্যানুয়াল)।
- ভুল নিবন্ধন সংশোধন (ল্যান্ডস্যাট কম্পোজিটের সাথে সহ-নিবন্ধন)।
চূড়ান্ত কম্পোজিটিংয়ের জন্য, পরিসংখ্যানগত হ্রাসের পরিবর্তে একটি ডিটারমিনিস্টিক মোজাইক পদ্ধতি ব্যবহার করা হয়েছিল। পিক্সেলগুলোকে স্থানিক রেজোলিউশন এবং স্যাটেলাইট মিশনের কালানুক্রম অনুসারে স্তরবিন্যাস করা হয়েছিল, যেখানে নতুন স্যাটেলাইট থেকে প্রাপ্ত পর্যবেক্ষণগুলোকে অগ্রাধিকার দেওয়া হয়। ডেটার কঠোর উৎস প্রতিষ্ঠা করার জন্য এই স্তরবিন্যাস ক্রমকে নিকটতম প্রতিবেশী রিস্যাম্পলিংয়ের সাথে একত্রিত করা হয়েছিল। ফলস্বরূপ, চূড়ান্ত বেসম্যাপের প্রতিটি পিক্সেল তার স্বতন্ত্র উৎস ধরে রেখেছিল এবং একটি নির্দিষ্ট উৎস পর্যবেক্ষণ ও তার মেটাডেটার সাথে সরাসরি শনাক্তযোগ্য ছিল।
উৎস ডেটা
স্যাটেলাইট এবং সেন্সর স্পেসিফিকেশন
জি-বিএফআইডি ভি১.০ বেসম্যাপগুলো স্পট (SPOT - Satellite pour l'Observation de la Terre) ইমেজ ডেটা থেকে উদ্ভূত। সিএনইএস (CNES) দ্বারা পরিচালিত এবং এয়ারবাস (Airbus) দ্বারা বিতরণকৃত স্পট মিশনগুলো ৬০ কিমি সোয়াথ জুড়ে উচ্চ-রেজোলিউশনের অপটিক্যাল চিত্র সরবরাহ করে। এই প্রকল্পটি ২০০৮ সালের বেসলাইন স্থাপন করার জন্য তিনটি নির্দিষ্ট স্যাটেলাইটের চিত্রের একটি আর্কাইভ ব্যবহার করে:
- স্পট ২ ও ৪: HRV/HRVIR সেন্সর দ্বারা সজ্জিত, যা ২০-মিটার রেজোলিউশনে মাল্টিস্পেকট্রাল ডেটা এবং ১০-মিটার রেজোলিউশনে প্যানক্রোম্যাটিক ডেটা প্রদান করে।
- স্পট ৫: এইচআরজি সেন্সর দ্বারা সজ্জিত, যা ১০-মিটার রেজোলিউশনে মাল্টিস্পেকট্রাল ডেটা এবং ৫-মিটার রেজোলিউশনে প্যানক্রোম্যাটিক ডেটার মাধ্যমে উল্লেখযোগ্যভাবে উন্নত স্থানিক রেজোলিউশন প্রদান করে।
| স্পট ২ | স্পট ৪ | স্পট ৫ | |
|---|---|---|---|
| মাল্টিস্পেকট্রাল | ২০ মিটার | ২০ মিটার | ১০ মিটার |
| প্যানক্রোম্যাটিক | ১০ মিটার | ১০ মিটার | ৫ মিটার |
| বর্ণালী ব্যান্ড | সবুজ, লাল, এনআইআর | সবুজ, লাল, এনআইআর, এসডব্লিউআইআর | সবুজ, লাল, এনআইআর, এসডব্লিউআইআর |
সারণি ১. স্পট ২, ৪ এবং ৫ অভিযানের প্রযুক্তিগত বিবরণ।
দ্রষ্টব্য: এয়ারবাস একটি 'সুপারমোড' প্যানক্রোম্যাটিক পণ্য উৎপাদন করে যা SPOT 5-এর ছবিকে ২.৫-মিটার রেজোলিউশন পর্যন্ত প্যান-শার্প করতে ব্যবহার করা যায়। এই প্রকল্পের স্পেসিফিকেশনের জন্য এই ডেটার প্রাপ্যতা অত্যন্ত সীমিত হওয়ায় তা অন্তর্ভুক্ত করা হয়নি।
ইনপুট আর্থ ইঞ্জিন সংগ্রহ
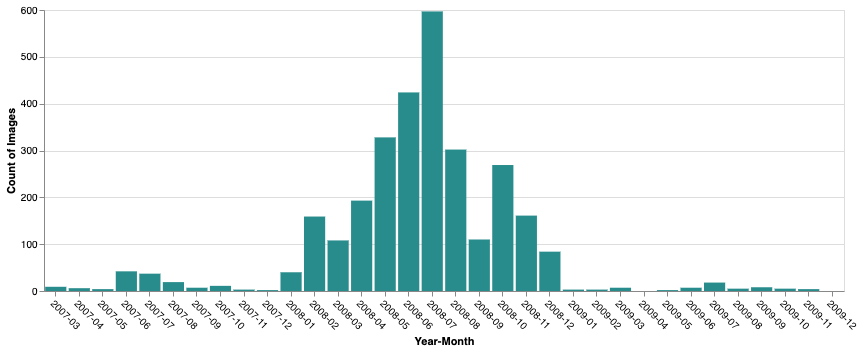
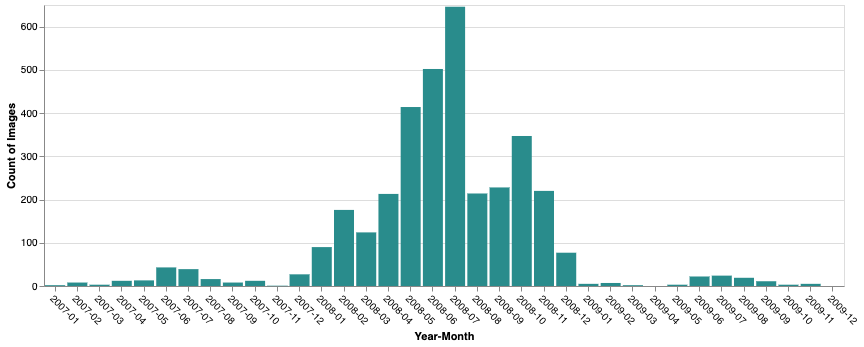
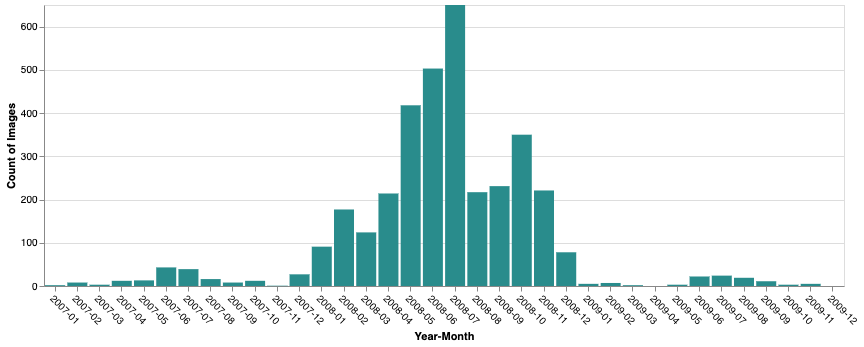
চূড়ান্ত বেসম্যাপগুলো তৈরি করার জন্য তিনটি স্বতন্ত্র SPOT ডেটা প্রোডাক্ট গ্রহণ ও প্রক্রিয়াজাত করা হয়েছিল। এই সংগ্রহগুলো ৯ই জানুয়ারী, ২০০৭ থেকে ২৬শে নভেম্বর, ২০০৯ পর্যন্ত সময়কালকে অন্তর্ভুক্ত করে, যা একটি উচ্চ-রেজোলিউশনের বেসলাইন বজায় রেখে মেঘের আচ্ছাদনজনিত সীমাবদ্ধতা কাটিয়ে ওঠার জন্য প্রয়োজনীয় সময়গত গভীরতা প্রদান করে।
দৃশ্য নির্বাচন
গ্রামীণ পরিবেশ রেজিস্ট্রি (CAR)-তে নিবন্ধিত ব্যক্তিগত মালিকানাধীন জমিতে বন সুরক্ষা প্রচেষ্টাকে সমর্থন করার জন্য, আমাজন বায়োম এবং "বন উজাড়ের বৃত্তচাপ" হিসেবে পরিচিত পাঁচটি রাজ্য—মারানহাও, মাতো গ্রোসো, পারা, রোনডোনিয়া এবং টোকানটিন্স-কে ভৌগোলিক পরিধির ক্ষেত্রে অগ্রাধিকার দেওয়া হয়েছিল।
ব্রাজিল বন আইনের প্রয়োজনীয়তার সাথে সামঞ্জস্য রাখতে, ২০০৮ সালের মাঝামাঝি সময়কে লক্ষ্য করা হয়েছিল। এই সময়কাল এবং মেঘাচ্ছন্নতার মানদণ্ডের (<৫০%) উপর ভিত্তি করে, SPOT ২, ৪, এবং ৫ থেকে মোট ১০,০৭২টি ছবি শনাক্ত করা হয় এবং প্রক্রিয়াকরণের জন্য আর্থ ইঞ্জিন ডেটা ক্যাটালগে অন্তর্ভুক্ত করা হয়।
বর্ণালী গঠন সংক্রান্ত দ্রষ্টব্য: SPOT 2, 4, এবং 5 সেন্সরগুলো স্বাভাবিকভাবে নীল বর্ণালী ব্যান্ড ধারণ করতে পারে না। স্বাভাবিক রঙের পণ্যগুলোর জন্য, ডেটা পরিবেশক একটি সংশ্লেষিত নীল ব্যান্ড সরবরাহ করে থাকে—যা বিদ্যমান বর্ণালী ব্যান্ডগুলো থেকে প্রকৃত রঙের একটি আনুমানিক উপস্থাপনার জন্য তৈরি করা হয়।
১. প্যানশার্পেনড মাল্টিস্পেকট্রাল প্রাকৃতিক রঙ
- আর্থ ইঞ্জিন অ্যাসেট:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/PMS_NC/V1 - ছবির সংখ্যা: ২৯৭৭
- সময়কাল: ১ মার্চ, ২০০৭ – ২৬ নভেম্বর, ২০০৯
- বিবরণ: এই পণ্যটি উচ্চ-রেজোলিউশনের প্যানক্রোম্যাটিক ব্যান্ডকে মাল্টিস্পেকট্রাল ব্যান্ডের সাথে একীভূত করে একটি সুস্পষ্ট, ৩-ব্যান্ডের আরজিবি (RGB) চিত্র তৈরি করে। ভিজ্যুয়াল বেসম্যাপের জন্য এটিই পছন্দের উৎস ।
২. বহুবর্ণালীর প্রাকৃতিক রঙ
- আর্থ ইঞ্জিন অ্যাসেট:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS_NC/V1 - ছবির সংখ্যা: ৩৫৩৬
- সময়কাল: ৯ জানুয়ারী, ২০০৭ – ২৬ নভেম্বর, ২০০৯
- বিবরণ: নেটিভ মাল্টিস্পেকট্রাল রেজোলিউশনে একটি ৩-ব্যান্ডের ছদ্ম-প্রাকৃতিক রঙের পণ্য (সিমুলেটেড আরজিবি)। এই সংগ্রহটি ভিজ্যুয়াল বেসম্যাপে একটি দ্বিতীয় উৎস হিসেবে ব্যবহৃত হয়, যেখানে প্যানশার্পেনড ডেটা অনুপলব্ধ থাকতে পারে।
৩. মাল্টিস্পেকট্রাল
- আর্থ ইঞ্জিন অ্যাসেট:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS/V1 - ছবির সংখ্যা: ৩৫৫৯
- সময়কাল: ৯ জানুয়ারী, ২০০৭ – ২৬ নভেম্বর, ২০০৯
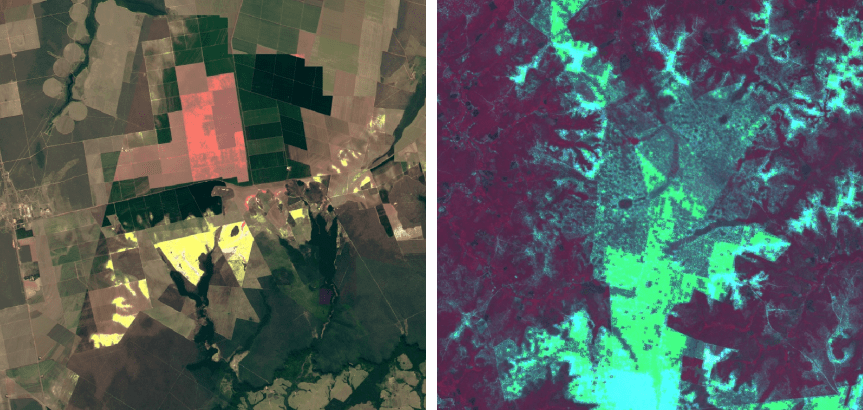
- বিবরণ: অ্যানালিটিক বেসম্যাপের উৎস । এই সংগ্রহটিতে ভেজিটেশন ইনডেক্স (যেমন, NDVI) গণনা এবং কভার ক্লাসিফিকেশন সম্পাদনের জন্য প্রয়োজনীয় মূল স্পেকট্রাল ব্যান্ডগুলো (যেখানে উপলব্ধ সেখানে নিয়ার-ইনফ্রারেড এবং শর্ট-ওয়েভ ইনফ্রারেড সহ) রয়েছে।
ভৌগোলিক পরিধি এবং ফাঁক
জি-বিএফআইডি ভি১.০ বেসম্যাপগুলোর প্রাথমিক উদ্দেশ্য হলো ব্রাজিলের প্রশাসনিক অঞ্চলের জন্য ২০০৮ সালের কাছাকাছি সময়ের একটি উচ্চ-রেজোলিউশনের বেসলাইন স্থাপন করা। তবে, একটি কঠোর সময়সীমা (২০০৭-২০০৯) বজায় রাখা এবং উচ্চ-মানের ও কম মেঘযুক্ত ছবিগুলো ফিল্টার করার ফলে স্থানিক ফাঁক তৈরি হয়েছে, বিশেষ করে দীর্ঘস্থায়ী মেঘাচ্ছন্ন অঞ্চলগুলোতে।
দৃশ্য নির্বাচন এবং গুণমান ফিল্টারিং
ডেটার অখণ্ডতা নিশ্চিত করার জন্য, ২০০৭-২০০৯ সাল থেকে ৫০%-এর কম প্রাথমিক মেঘাচ্ছন্নতাযুক্ত ছবিগুলোর একটি সম্ভাব্য তালিকা চিহ্নিত করা হয়েছিল। এই তালিকা থেকে মোট ১০,০০০-এর কিছু বেশি ছবি সংগ্রহ করা হয় এবং গুরুতর মানের সমস্যাযুক্ত ছবিগুলো বাদ দেওয়ার জন্য সেগুলোকে আরও ফিল্টার করা হয়।
- বিচ্ছিন্নতা যাচাই : হাতে-কলমে শনাক্ত করা টেলিমেট্রি বা জ্যামিতিক ত্রুটিযুক্ত ছবি, যার মধ্যে ডেটা সরবরাহকারী দ্বারা একত্রিত করা বিচ্ছিন্ন দৃশ্যও অন্তর্ভুক্ত ছিল, সেগুলোকে বাদ দেওয়া হয়েছে।
- ক্লাউড কিউএ : সম্পূর্ণ মেঘে ঢাকা থাকা বা অন্য কোনো কারণে পেশাদার চিত্র বিশ্লেষকদের দ্বারা প্রত্যাখ্যাত দৃশ্য।
- ডেটা ঘনত্ব : ক্লাউড মাস্কিংয়ের পর যে সকল ছবিতে ১০%-এর বেশি বৈধ পিক্সেল (ভিজ্যুয়াল বেসম্যাপ) অবশিষ্ট ছিল, শুধুমাত্র সেগুলোই রাখা হয়েছে (অ্যানালিটিক বেসম্যাপের জন্য ৫%-এর বেশি)।
স্থানিক বন্টন
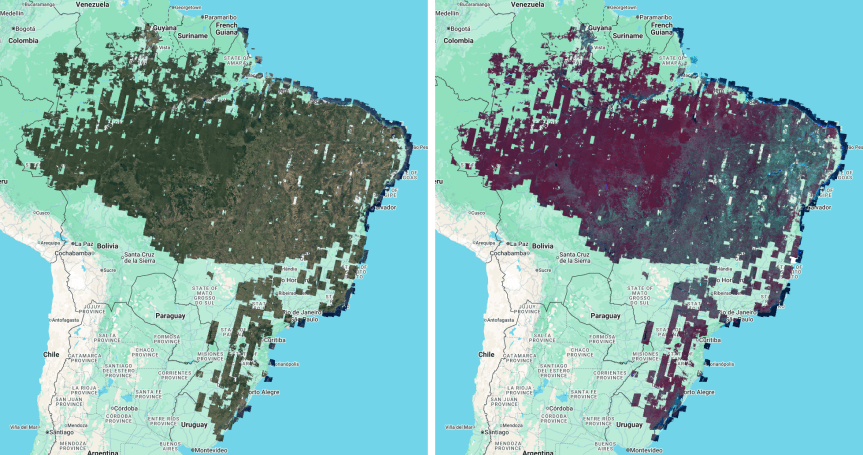
চিত্র ৫-এ যেমন দেখানো হয়েছে, মোজাইকগুলো "বন উজাড়ের বৃত্তচাপ" এবং উত্তর/মধ্য-পশ্চিম অঞ্চলে সর্বোচ্চ ঘনত্ব অর্জন করে। স্বচ্ছ এলাকাগুলো এমন অঞ্চলকে নির্দেশ করে যেখানে নির্ধারিত সময়সীমার মধ্যে SPOT 2, 4, বা 5-এর কোনো চিত্রই উপরে তালিকাভুক্ত গুণমান ফিল্টারগুলো অতিক্রম করতে পারেনি অথবা মেঘ দ্বারা আবৃত ছিল।
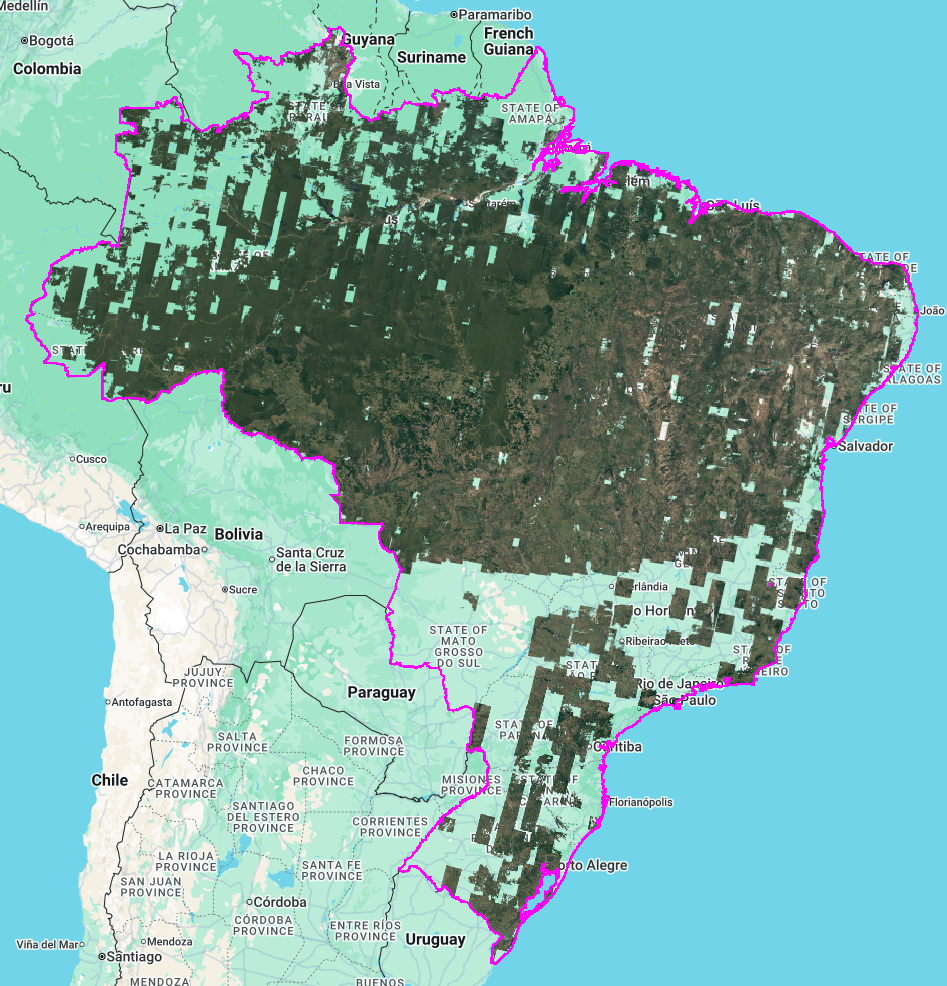
রাজ্য অনুসারে কভারেজ
চিত্র ৬-এ রাজ্যভিত্তিক বৈধ পিক্সেল কভারেজের একটি বিশদ বিবরণ দেওয়া হয়েছে। রনডোনিয়া এবং মাতো গ্রোসোর মতো রাজ্যগুলির জন্য কভারেজ প্রায় সম্পূর্ণ (>৯৫%), অন্যদিকে আর্কাইভের সীমাবদ্ধতা এবং ক্লাউড মাস্কিংয়ের কারণে দক্ষিণের রাজ্যগুলিতে এবং উত্তর-পূর্বের কিছু অংশে ঘনত্ব কম দেখা যায়।
চার্টটি আরও দেখায় যে, প্রায় সমস্ত স্টেট জুড়েই ভিজ্যুয়াল বেসম্যাপ অ্যানালিটিক বেসম্যাপের তুলনায় ধারাবাহিকভাবে সামান্য বেশি বৈধ পিক্সেল কভারেজ প্রদান করে। এই পার্থক্যের কারণ হলো, ভিজ্যুয়াল প্রোডাক্টটি প্যানশার্পেনড এবং মাল্টিস্পেকট্রাল উভয় প্রাকৃতিক রঙের সংগ্রহই ব্যবহার করতে পারে, যেখানে অ্যানালিটিক প্রোডাক্টটি শুধুমাত্র মাল্টিস্পেকট্রাল সংগ্রহ থেকে উদ্ভূত হয়।
প্রক্রিয়াকরণ পদ্ধতি
জি-বিএফআইডি ভি১.০ বেসম্যাপের প্রক্রিয়াকরণ পদ্ধতিটি ফরেস্ট কোড পরিপালন মূল্যায়নকে সমর্থন করার জন্য ডেটার উৎস এবং তেজস্ক্রিয় অখণ্ডতাকে অগ্রাধিকার দেয়। এই বিভাগে প্রথমে এই অখণ্ডতা বজায় রাখার জন্য ব্যবহৃত সামগ্রিক মোজাইক কাঠামো এবং স্তরবিন্যাস যুক্তি সংজ্ঞায়িত করা হয়েছে, এবং তারপরে চূড়ান্ত সমাবেশের আগে প্রতিটি উৎস চিত্রের উপর প্রয়োগ করা কালানুক্রমিক প্রাক-প্রক্রিয়াকরণ এবং স্বাভাবিকীকরণ ধাপগুলি বর্ণনা করা হয়েছে।
মোজাইক পদ্ধতি
চূড়ান্ত বেসম্যাপগুলো স্ট্যাটিস্টিক্যাল রিডিউসার (যেমন মিন বা মিডিয়ান কম্পোজিট) ব্যবহার না করে মোজাইক পদ্ধতি ব্যবহার করে তৈরি করা হয়েছে। এই পদ্ধতিটি নিশ্চিত করে যে চূড়ান্ত পণ্যগুলো উৎস চিত্রের আসল স্পেকট্রাল মান এবং স্পেশিয়াল টেক্সচার ধরে রাখে। একাধিক পর্যবেক্ষণের গড় করা এড়িয়ে চলার মাধ্যমে, মোজাইক প্রতিটি পিক্সেলের স্বতন্ত্র উৎস সংরক্ষণ করে।
স্তরবিন্যাস যুক্তি
ইনপুট চিত্রাবলীকে এমন একটি স্তরবিন্যাস ব্যবহার করে স্তরিত করা হয়েছিল যা উচ্চতর স্থানিক রেজোলিউশন এবং পরবর্তী স্যাটেলাইট মিশনগুলিকে অগ্রাধিকার দেয়:
- ভিজ্যুয়াল বেসম্যাপ: চিত্রাবলীকে প্রথমে পিক্সেল সাইজ অনুসারে (উপলব্ধ সর্বোচ্চ রেজোলিউশনের ডেটাকে অগ্রাধিকার দিয়ে) এবং তারপর স্যাটেলাইট মিশন অনুসারে (নতুন SPOT স্যাটেলাইট থেকে প্রাপ্ত ডেটাকে অগ্রাধিকার দিয়ে) সাজানো হয়েছিল।
- বিশ্লেষণাত্মক বেসম্যাপ: সেরা উপলব্ধ ডেটা লক্ষ্য করার জন্য পরবর্তী SPOT মিশনগুলির পর্যবেক্ষণকে অগ্রাধিকার দিয়ে স্যাটেলাইট মিশন অনুসারে চিত্রাবলীকে স্তরবিন্যাস করা হয়েছিল।
অখণ্ডতা এবং শনাক্তকরণযোগ্যতা
পুনঃনমুনা গ্রহণ: সমস্ত অভ্যন্তরীণ পুনঃপ্রক্ষেপণে নিকটতম প্রতিবেশী পুনঃনমুনা গ্রহণ পদ্ধতি ব্যবহার করা হয়েছে। এটি অন্যান্য পদ্ধতির ইন্টারপোলেটিভ মসৃণকরণ প্রভাব এড়িয়ে চলে, যা নিশ্চিত করে যে উৎস পিক্সেলগুলির মূল তেজস্ক্রিয় এবং স্থানিক বৈশিষ্ট্যগুলি তাদের প্রতিবেশীদের দ্বারা প্রভাবিত না হয়।
ডেটার উৎস শনাক্তকরণযোগ্যতা: উভয় প্রোডাক্টেই পিক্সেল-ভিত্তিক একটি
dateমেটাডেটা ব্যান্ড অন্তর্ভুক্ত রয়েছে। এর মাধ্যমে ব্যবহারকারীরা যেকোনো নির্দিষ্ট স্থানের পর্যবেক্ষণের সঠিক তারিখ শনাক্ত করতে পারেন, যা ফরেস্ট কোড পরিপালন মূল্যায়নের ক্ষেত্রে পূর্ণ স্বচ্ছতা নিশ্চিত করে।
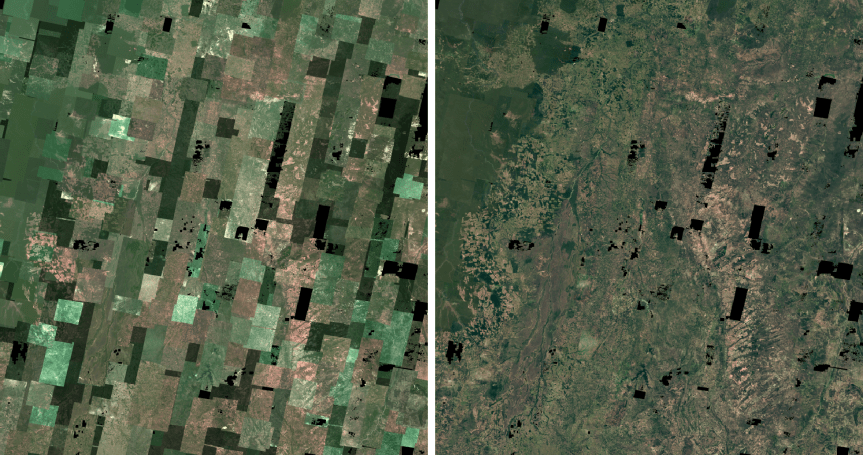
ছবির প্রান্ত পরিমার্জন
ওভারল্যাপিং দৃশ্যগুলির মধ্যে পরিষ্কার সীমানা নিশ্চিত করার জন্য, উৎস চিত্রাবলীতে উপস্থিত আর্টিফ্যাক্টগুলি অপসারণ করতে একটি এজ রিফাইমেন্ট প্রক্রিয়া প্রয়োগ করা হয়েছিল। এই আর্টিফ্যাক্টগুলি, যা চিত্রের সীমানা বরাবর ছিটছিটে বা "নয়েজি" পিক্সেল হিসাবে দেখা যায়, তা ছিল সরবরাহকারীর দেওয়া ডেটার লসি কম্প্রেশনের একটি বৈশিষ্ট্য। এর সমাধান করতে, ইমেজ মাস্কগুলিতে একটি ২.৫-পিক্সেল ফোকাল মিনিমাম ইরোশন প্রয়োগ করা হয়েছিল, যা নিম্ন-মানের এজ আর্টিফ্যাক্টগুলি অপসারণ করে এবং নিশ্চিত করে যে চূড়ান্ত মোজাইকগুলিতে কেবল বৈধ ডেটাই ব্যবহৃত হয় (চিত্র ৭)।

মেঘ মাস্কিং
G-BFID v1.0-এর সর্বোচ্চ সম্ভাব্য ডেটা অখণ্ডতা নিশ্চিত করার জন্য, চিত্র আর্কাইভ জুড়ে একটি ম্যানুয়াল মাস্কিং পদ্ধতি প্রয়োগ করা হয়েছিল। মেঘ বা অন্যান্য বায়ুমণ্ডলীয় প্রতিবন্ধকতা দ্বারা প্রভাবিত পিক্সেলগুলিকে আরও সতর্কতার সাথে বাদ দেওয়ার সুযোগ করে দিতে, স্বয়ংক্রিয় পদ্ধতির পরিবর্তে এই পন্থাটি বেছে নেওয়া হয়েছিল।
মাস্কিং পদ্ধতি
প্রশিক্ষিত বিশ্লেষকরা মেঘ এবং সংশ্লিষ্ট বায়ুমণ্ডলীয় উপাদানযুক্ত এলাকাগুলো চিহ্নিত করেছেন। এই সমস্যাযুক্ত পিক্সেলগুলো যাতে সম্পূর্ণরূপে ধারণ করা হয়, তা নিশ্চিত করতে সরলীকৃত ও স্থূল জ্যামিতি ব্যবহার করে একটি রক্ষণশীল মাস্কিং কৌশল প্রয়োগ করা হয়েছিল। প্রতিটি মেঘের পরিধি নির্ভুলভাবে চিহ্নিত করার পরিবর্তে, বৃহত্তর আয়তক্ষেত্রাকার এলাকাগুলোকে মাস্ক করা হয়েছিল, যাতে ফলস্বরূপ মোজাইকটি যথাসম্ভব স্পষ্ট থাকে।
যদিও এই পদ্ধতিটি ইচ্ছাকৃতভাবে কঠোর—প্রায়শই মেঘের সংলগ্ন বৈধ পিক্সেলগুলোও সরিয়ে দেয়—২০০৮ সালের বেসলাইনের জন্য একটি উচ্চ-মানের পণ্য সরবরাহ করতে এটিকে প্রয়োজনীয় বলে মনে করা হয়েছিল।
মাস্কিং নীতি এবং একীকরণ
বিশেষভাবে মাল্টিস্পেকট্রাল এবং প্যানশার্পেনড ন্যাচারাল কালার ইমেজ কালেকশনগুলোর জন্য ম্যানুয়াল মাস্ক তৈরি করা হয়েছিল। যেহেতু মাল্টিস্পেকট্রাল ন্যাচারাল কালার প্রোডাক্টটি মাল্টিস্পেকট্রাল ডেটা থেকে উদ্ভূত, তাই প্রসেসিংয়ের সময় এই মাস্কগুলো সমাপতিত মাল্টিস্পেকট্রাল ইমেজগুলোতে প্রয়োগ করা হয়েছিল।
যেসব মাল্টিস্পেকট্রাল ছবির কোনো মিলে যাওয়া, ম্যানুয়ালি মাস্ক করা স্বাভাবিক রঙের প্রতিরূপ ছিল না, সেগুলোকে চূড়ান্ত মোজাইক থেকে বাদ দেওয়া হয়েছিল। এটি নিশ্চিত করে যে G-BFID v1.0 স্যুটে অন্তর্ভুক্ত প্রতিটি পিক্সেল থেকে—পণ্যের ধরন নির্বিশেষে—ক্লাউড অপসারণ করা হয়েছে।
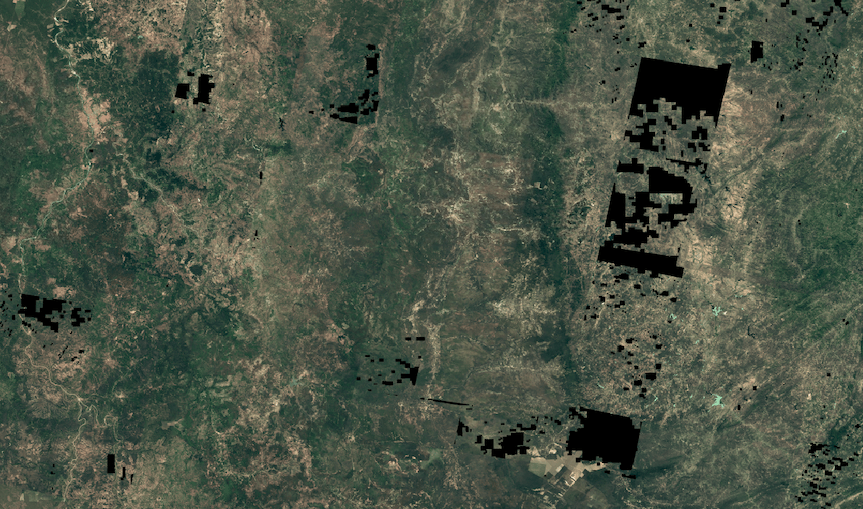
তথ্যের ফাঁকের ব্যাখ্যা
চূড়ান্ত মোজাইকগুলিতে স্বচ্ছ ফাঁকগুলি এমন এলাকাগুলিকে নির্দেশ করে যেখানে ২০০৭-২০০৯ সময়কালের মধ্যে কোনো বৈধ, উচ্চ-মানের ডেটা উপলব্ধ নেই। এই ফাঁকগুলি উপরে বর্ণিত রক্ষণশীল ম্যানুয়াল মাস্কিং, উচ্চ মেঘাচ্ছন্নতা (>৫০%) সহ দৃশ্যগুলির প্রাথমিক বর্জন, অথবা একটি নির্দিষ্ট অঞ্চলের জন্য প্রদানকারীর কাছ থেকে উপলব্ধ উৎস চিত্রের সম্পূর্ণ অনুপস্থিতির সম্মিলিত ফল। যদিও বৃহত্তর আঞ্চলিক ফাঁকগুলি সাধারণত ২০০৮-যুগের চিত্রের অভাবকে প্রতিফলিত করে, চিত্র ৯-এ প্রদর্শিত স্বতন্ত্র "ব্লকি" প্যাটার্নগুলি ক্লাউড মাস্কিংয়ের ফল।
ভুল নিবন্ধন সংশোধন
ল্যান্ডস্যাট কালেকশন ২ ডেটা থেকে প্রাপ্ত ভৌগোলিক বেসলাইনের সাপেক্ষে SPOT সোর্স ইমেজারিতে উল্লেখযোগ্য মিসরেজিস্ট্রেশন প্রশমিত করার জন্য একটি স্বয়ংক্রিয় কোরেজিস্ট্রেশন ওয়ার্কফ্লো বাস্তবায়ন করা হয়েছিল।
রেফারেন্স বেসলাইন
একটি মেঘমুক্ত ল্যান্ডস্যাট কালেকশন ২ রেফারেন্স মোজাইক তৈরি করা হয়েছিল, যা একটি কোরেজিস্ট্রেশন রেফারেন্স ইমেজ হিসেবে কাজ করবে। এই রেফারেন্স ইমেজটি ২০০৬-২০১০ সময়কালের ব্রাজিলকে ছেদকারী ল্যান্ডস্যাট ৭ এবং ৮ ইমেজের উপর একটি মিডিয়ান রিডিউসার ব্যবহার করে নির্মাণ করা হয়েছিল। SPOT রেড ব্যান্ডের সাথে মেলানোর জন্য ল্যান্ডস্যাট রেড ব্যান্ডকে প্রাথমিক রেজিস্ট্রেশন টার্গেট হিসেবে নির্বাচন করা হয়েছিল।
স্থানচ্যুতি অনুমান
SPOT উৎস ডেটা এবং ল্যান্ডস্যাট রেফারেন্সের মধ্যে পিক্সেল-স্তরের অফসেট গণনা করার জন্য ee.Image.displacement অ্যালগরিদমটি ব্যবহার করা হয়েছিল।
- অনুসন্ধান পরামিতি: সরণ মডেলে সর্বোচ্চ ৫০০ মিটার অফসেট এবং ৫ এর একটি দৃঢ়তা পরামিতি প্রয়োগ করা হয়েছিল।
- পরিসংখ্যানগত একত্রীকরণ: একটি মিন রিডিউসার ব্যবহার করে সম্পূর্ণ ইমেজ এলাকা জুড়ে ডেল্টা এক্স ($dx$), ডেল্টা ওয়াই ($dy$) এবং কনফিডেন্স ভ্যালুগুলোকে একত্রিত করা হয়েছিল।
- মাত্রা গণনা: এই সমষ্টিগত পরিসংখ্যান থেকে, দৃশ্যটির গড় সরণকে উপস্থাপন করার জন্য মোট মাত্রার অফসেট অনুমান $M = \sqrt{dx^2 + dy^2}$ গণনা করা হয়েছিল।
সংশোধন নীতি
গণনাকৃত সরণ পরিসংখ্যানের উপর ভিত্তি করে দৃশ্যগুলোকে শ্রেণিবদ্ধ ও সংশোধন করা হয়েছিল, যাতে নতুন ত্রুটির সৃষ্টি এড়িয়ে উল্লেখযোগ্য উন্নতিগুলোকে অগ্রাধিকার দেওয়া যায়।
- স্বয়ংক্রিয় সংশোধন : যেসব ছবির সরণের মাত্রা $M > 30$ মিটার এবং কনফিডেন্স স্কোর $C > 0.3$ ছিল, সেগুলোকে আনুমানিক $dx$ এবং $dy$ মান ব্যবহার করে স্বয়ংক্রিয়ভাবে স্থানান্তরিত করা হয়েছিল।
- ম্যানুয়াল মূল্যায়ন : যেসব দৃশ্যের আনুমানিক সরণ খুব বেশি ($M > 100$ মি) কিন্তু নির্ভরযোগ্যতা কম ($C \le 0.3$), সেগুলোর ক্ষেত্রে ম্যানুয়াল পর্যালোচনা করা হয়েছিল। সংশোধনগুলো কেবল তখনই গ্রহণ করা হয়েছিল, যদি এর ফলে প্রাপ্ত কোরেজিস্ট্রেশন মূল অবস্থানের তুলনায় একটি সুস্পষ্ট উন্নতি প্রদর্শন করে।
- বর্জন : সংশোধনের চেষ্টার পরেও যে দৃশ্যগুলো উল্লেখযোগ্যভাবে ভুলভাবে নিবন্ধিত ছিল, অথবা নির্ভরযোগ্যভাবে মেলানোর জন্য যেগুলোতে পর্যাপ্ত বৈশিষ্ট্য ছিল না, সেগুলোকে মোজাইক থেকে বাদ দেওয়া হয়েছিল।
বাস্তবায়ন এবং গুণমান নিয়ন্ত্রণ
মূল রেডিওমেট্রিক মানগুলো অক্ষুণ্ণ রাখতে এবং বাইলিনিয়ার বা কিউবিক ইন্টারপোলেশনের মসৃণকরণ প্রভাব এড়াতে, সংশোধিত চিত্রগুলোকে নিকটতম প্রতিবেশী রিস্যাম্পলিং ব্যবহার করে পুনরায় প্রক্ষেপণ করা হয়েছিল।
স্থানিক শনাক্তযোগ্যতা নিশ্চিত করার জন্য, প্রতিটি ছবির সাথে একটি বুলিয়ান coregistered ব্যান্ড যুক্ত করা হয়েছিল এবং চূড়ান্ত মোজাইকে তা সংরক্ষণ করা হয়েছিল। এই মেটাডেটা ব্যবহারকারীদের স্থানিক সমন্বয়ের মধ্য দিয়ে যাওয়া পিক্সেল এবং তাদের মূল অবস্থানে থাকা পিক্সেলগুলোর মধ্যে পার্থক্য করতে সাহায্য করে।
রেডিওমেট্রিক স্বাভাবিকীকরণ
SPOT উৎস সংগ্রহগুলোর মধ্যে বায়ুমণ্ডলীয় অবস্থার ভিন্নতা এবং সেন্সরের পার্থক্য বিবেচনা করার জন্য, মোজাইক পণ্যগুলো গঠনকারী চিত্রগুলিতে রেডিওমেট্রিক নর্মালাইজেশন প্রয়োগ করা হয়েছিল। ভিজ্যুয়াল এবং অ্যানালিটিক উভয় বেসম্যাপই একটি সামঞ্জস্যপূর্ণ ২০০৮ ল্যান্ডস্যাট টার্গেট বেসলাইনের সাথে হিস্টোগ্রাম ম্যাচিং ব্যবহার করে।
MODIS-এর মতো অপেক্ষাকৃত কম রেজোলিউশনের বিকল্পগুলোর পরিবর্তে Landsat-কে রেফারেন্স হিসেবে নির্বাচন করা হয়েছে, কারণ এর ৩০-মিটার রেজোলিউশন ৫ থেকে ২০-মিটার SPOT ডেটার সাথে আরও ঘনিষ্ঠভাবে মিলে যায়। এই সাদৃশ্য নিশ্চিত করে যে স্পেকট্রাল হিস্টোগ্রামগুলো আরও সমানভাবে প্রতিনিধিত্বমূলক হয়, যা ম্যাচিং প্রক্রিয়ার সময় আরও নির্ভুল রেডিওমেট্রিক স্থানান্তরের সুযোগ করে দেয়। এই সামঞ্জস্য বিধানের নির্দিষ্ট পদ্ধতিটি চূড়ান্ত ব্যবহারের ক্ষেত্রটি ভিজ্যুয়াল নাকি অ্যানালিটিক, তার উপর ভিত্তি করে সামান্য ভিন্ন হয়।
ভিজ্যুয়াল বেসম্যাপ
সংলগ্ন ছবিগুলোর মধ্যে রেডিওমেট্রিক অসামঞ্জস্যতা কমানো এবং প্রায় ত্রুটিহীন চেহারা নিশ্চিত করার জন্য, হিস্টোগ্রাম ম্যাচিং ব্যবহার করে একটি কালার-ব্যালান্সিং ওয়ার্কফ্লো প্রয়োগ করা হয়েছিল। একটি সামঞ্জস্যপূর্ণ ২০০৮ ল্যান্ডস্যাট মোজাইক টার্গেট বেসলাইনের সাথে মেলানোর জন্য পিক্সেল মানগুলো সমন্বয় করা হয়েছিল।
প্রক্রিয়াটি নিম্নলিখিত ধাপগুলো অনুসরণ করে:
- বিশ্লেষণ মাস্কিং : হিস্টোগ্রাম ম্যাচিংয়ের সময় স্থিতিশীল পরিসংখ্যান নিশ্চিত করতে, ডেটাকে বিকৃত করতে পারে এমন এলাকাগুলোকে বাদ দেওয়ার জন্য একটি অস্থায়ী বিশ্লেষণ মাস্ক তৈরি করা হয়। এই মাস্কিং দুটি প্রধান বৈশিষ্ট্যকে লক্ষ্য করে:
- উচ্চ-পরিবর্তনশীল এলাকা : SPOT চিত্র এবং ল্যান্ডস্যাট রেফারেন্স মোজাইকের মধ্যে পরম পার্থক্যের ৯৫তম পার্সেন্টাইল অতিক্রমকারী পিক্সেলগুলি বাদ দেওয়া হয়।
- জলাশয় : JRC ইয়ারলি ওয়াটার ক্লাসিফিকেশন হিস্ট্রি ডেটাসেট ব্যবহার করে জলের উপর উচ্চ প্রতিফলন পরিবর্তনশীলতা বাদ দেওয়া হয়েছে। ডেটাসেটটি ২০০৮ সাল পর্যন্ত ফিল্টার করা হয়েছে এবং একটি ইনভার্স মাস্ক প্রয়োগ করা হয়েছে, যাতে পরিসংখ্যানগত বিশ্লেষণের জন্য শুধুমাত্র অ-জল শ্রেণীগুলোই সংরক্ষিত থাকে।
- লুকআপ টেবিল (LUT) তৈরি : মাস্ক করা ডেটা ব্যবহার করে, উৎস SPOT ব্যান্ড এবং লক্ষ্য ল্যান্ডস্যাট ব্যান্ড উভয়ের জন্য ক্রমসঞ্চয়ী হিস্টোগ্রাম গণনা করা হয়।
- ইন্টারপোলেশন : তৈরি করা LUT ব্যবহার করে উৎস পিক্সেলের মানগুলোকে লক্ষ্য মানে পুনঃস্থাপন করা হয়, যা SPOT ডেটার রেডিওমেট্রিক প্রোফাইলকে ২০০৮ সালের ল্যান্ডস্যাট রেফারেন্সের সাথে সারিবদ্ধ করে।
বিশ্লেষণাত্মক বেসম্যাপ
অ্যানালিটিক বেসম্যাপ প্রক্রিয়াকরণ ভিজ্যুয়াল বেসম্যাপের অনুরূপ, তবে এতে ডিএন মানগুলিকে বায়ুমণ্ডলের শীর্ষের প্রতিফলনে রূপান্তর করা অন্তর্ভুক্ত থাকে:
১. বায়ুমণ্ডলের শীর্ষ (TOA) প্রতিফলন রূপান্তর
সেন্সরের ভৌত বৈশিষ্ট্য এবং সৌর জ্যামিতি বিবেচনা করার জন্য SPOT-এর কাঁচা ডিজিটাল সংখ্যা (DN)-কে TOA প্রতিফলনে রূপান্তরিত করা হয়:
- রেডিয়েন্স গণনা : প্রদানকারীর ব্যান্ড-নির্দিষ্ট ফিজিক্যাল গেইন এবং বায়াস মেটাডেটার প্রয়োগ।
- প্রতিফলন স্বাভাবিকীকরণ : নির্দিষ্ট দিনে প্রাপ্ত বিকিরণকে সৌর বিকিরণ, সূর্যের শীর্ষ কোণের কোসাইন এবং পৃথিবী-সূর্যের দূরত্ব দ্বারা স্বাভাবিকীকরণ করা হয়।
২. হিস্টোগ্রাম মেলানো
ভিন্ন ভিন্ন SPOT ইমেজের মধ্যে রেডিওমেট্রিক পার্থক্য আরও কমাতে একটি হিস্টোগ্রাম ম্যাচিং ওয়ার্কফ্লো প্রয়োগ করা হয়:
বিশ্লেষণ মাস্কিং : এই ধাপে উপরের ভিজ্যুয়াল বেসম্যাপ বিভাগে বর্ণিত হুবহু একই বিশ্লেষণ মাস্কিং ব্যবহার করা হয়: ৯৫তম পার্সেন্টাইলের বেশি পরিবর্তনযুক্ত পিক্সেল বাদ দেওয়া এবং বিপরীত ২০০৮ জেআরসি ক্লাসিফিকেশন মাস্কের মাধ্যমে জলের পিক্সেল ফিল্টার করে বাদ দেওয়া।
সমন্বয়সাধন : ভিজ্যুয়াল বেসম্যাপের মতোই, রেডিওমেট্রিক প্রোফাইলকে একটি ল্যান্ডস্যাট TOA রেফারেন্সের সাথে সারিবদ্ধ করার জন্য একটি লুকআপ টেবিলের মাধ্যমে পিক্সেল মানগুলিকে পুনরায় ম্যাপ করা হয়। এটি বৃহৎ পরিসরের মেশিন লার্নিং মডেল প্রশিক্ষণের জন্য এবং নির্ভরযোগ্য সিদ্ধান্ত গ্রহণের জন্য মোজাইক-ব্যাপী রেডিওমেট্রিক সামঞ্জস্য স্থাপন করে।
সীমাবদ্ধতা এবং জ্ঞাত সমস্যা
যদিও G-BFID v1.0 ২০০৮ সালের একটি উচ্চ-রেজোলিউশনের বেসলাইন প্রদান করে, ব্যবহারকারীদের ঐতিহাসিক SPOT আর্কাইভ এবং ব্যবহৃত প্রক্রিয়াকরণ পদ্ধতিগুলোর অন্তর্নিহিত বেশ কিছু সীমাবদ্ধতা সম্পর্কে সচেতন থাকা উচিত।
স্থানিক পূর্ণতা এবং ফাঁক
বেসম্যাপগুলো ব্রাজিলের শতভাগ ভৌগোলিক এলাকা জুড়ে বিস্তৃত নয়। যেখানে কোনো চিত্রই প্রকল্পের কঠোর ২০০৮-কালীন সময়সীমা (২০০৭-২০০৯), মেঘাচ্ছন্নতার সীমা বা গুণমানের মানদণ্ড পূরণ করতে পারেনি, সেখানে ফাঁক রয়ে গেছে। এই ফাঁকগুলো সেইসব অঞ্চলে সবচেয়ে বেশি দেখা যায় যেখানে দীর্ঘস্থায়ী মেঘাচ্ছন্নতা রয়েছে অথবা যেখানে ঐতিহাসিকভাবে স্যাটেলাইট থেকে চিত্র সংগ্রহের হার কম। বিস্তারিত জানতে ‘ভৌগোলিক পরিধি ও ফাঁক’ অংশটি দেখুন।
পরিবর্তনশীল স্থানীয় রেজোলিউশন
যদিও চূড়ান্ত পণ্যগুলো ৫ মিটার (ভিজ্যুয়াল) এবং ১০ মিটার (অ্যানালিটিক) নামমাত্র পিক্সেল আকারে সরবরাহ করা হয়, মূল চিত্রাবলীতে ৫ মিটার, ১০ মিটার এবং ২০ মিটার নেটিভ পিক্সেলের মিশ্রণ থাকে। বর্ণালীর অখণ্ডতা বজায় রাখার জন্য নিকটতম প্রতিবেশী রিস্যাম্পলিং ব্যবহার করা হয়েছে বলে, বিভিন্ন রেজোলিউশনের মধ্যকার সীমানা দৃশ্যমান হতে পারে।

অবশিষ্ট ভুল নিবন্ধন
স্বয়ংক্রিয় কোরেজিস্ট্রেশন কার্যপ্রবাহ থাকা সত্ত্বেও, কিছু এলাকায় স্থানিক বিচ্যুতি থেকে যেতে পারে। অবশিষ্ট ভুল নিবন্ধন সবচেয়ে বেশি হওয়ার সম্ভাবনা থাকে চরম ভূ-উচ্চতা সম্পন্ন অঞ্চলে অথবা ঘন, সমজাতীয় বনভূমিতে, যেখানে উচ্চ-নির্ভরযোগ্য সরণ ভেক্টর গণনা করার জন্য অ্যালগরিদমের কাছে পর্যাপ্ত ল্যান্ডমার্ক থাকে না।
বায়ুমণ্ডলীয় এবং মেঘের নিদর্শন
ম্যানুয়াল ক্লাউড মাস্কিং প্রক্রিয়াটি ইচ্ছাকৃতভাবে সংযত ও জোরালো ছিল; তবে এটি সম্পূর্ণ নয়। ব্যবহারকারীরা মাঝে মাঝে কিছু অবশিষ্ট আর্টিফ্যাক্টের সম্মুখীন হতে পারেন, যেমন খুব পাতলা সিরাস হেজ বা ছোট মেঘের ছায়া।
রেডিওমেট্রিক অসামঞ্জস্য এবং এমএল কর্মক্ষমতা
রেডিওমেট্রিক অসামঞ্জস্যতা কমানোর জন্য হিস্টোগ্রাম ম্যাচিং ব্যবহার করা হলেও, পাশাপাশি থাকা ছবিগুলোর মধ্যে অবশিষ্ট বর্ণালীগত ভিন্নতা থেকে যায়। স্বয়ংক্রিয় ভূমি আচ্ছাদন শ্রেণিবিন্যাস বা মেশিন লার্নিং অ্যাপ্লিকেশনের ক্ষেত্রে, এই পরিবর্তনশীলতা মোজাইক জুড়ে একটি নির্দিষ্ট ভূমি আচ্ছাদন প্রকারের জন্য বর্ণালীগত বৈচিত্র্য বাড়িয়ে দেয়। এই বিস্তৃত ডেটা পরিসর অনুমানের সময় শ্রেণি পৃথকীকরণের নির্ভুলতা কমিয়ে দিতে পারে, যা সম্ভাব্যভাবে ত্রুটির হার বাড়িয়ে তোলে।
বর্ণালী সম্পৃক্তি
অত্যধিক উজ্জ্বল স্থানগুলিতে—যেমন অত্যন্ত প্রতিফলক শহুরে পৃষ্ঠতল, নির্দিষ্ট ধরণের মাটি বা উজ্জ্বল বালি—পিক্সেলগুলি সেন্সরের সর্বোচ্চ শনাক্তযোগ্য সীমায় পৌঁছে যেতে পারে। এই 'স্যাচুরেশন'-এর ফলে ঐ নির্দিষ্ট স্থানগুলিতে টেক্সচার এবং ডিটেইল নষ্ট হয়ে যায়।
পরিবর্তিত ব্যান্ড অনুপাত এবং উদ্ভিদ সূচক
To achieve a near-seamless mosaic, histogram matching was applied to each spectral band individually, which inherently alters the original physical ratios between bands. As a result, calculating common indices like NDVI or other band-ratio metrics will produce values that differ from unaltered source datasets. While these derived indices may still capture relative spatial patterns across the mosaic, they should not be used for absolute purposes, cross-sensor comparisons, or analyses that rely on rigid index thresholds.