- Disponibilidade do conjunto de dados
- 1985-06-01T00:00:00Z–2023-09-30T00:00:00Z
- Produtor de conjunto de dados
- USDA Forest Service (USFS) Field Services and Innovation Center Geospatial Office (FSIC-GO)
- Tags
Descrição
Visão geral
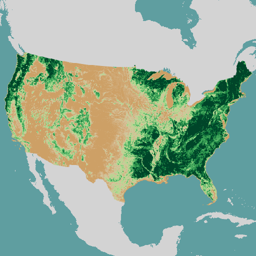
O conjunto de dados de cobertura da copa das árvores (TCC, na sigla em inglês), produzido pelo Departamento de Agricultura dos Estados Unidos, Serviço Florestal (USFS, na sigla em inglês), é composto por mapas anuais baseados em sensoriamento remoto de 1985 a 2023. Esses dados são compatíveis com o projeto National Land Cover Database (NLCD), gerenciado pelo US Geological Survey (USGS) como parte do consórcio Multi-Resolution Land Characteristics (MRLC). O projeto tem como objetivo usar a tecnologia mais recente para criar um mapa consistente e "melhor disponível" da cobertura de áreas verdes. O escopo geográfico inclui as regiões dos Estados Unidos contíguos (CONUS) e OCONUS (Sudeste do Alasca [SEAK], Havaí, Porto Rico e Ilhas Virgens Americanas [PRUSVI]).
Produtos
O pacote de dados da TCC inclui três produtos:
TCC de ciências:as saídas brutas e diretas do modelo.
Erro padrão de ciência (SE): o desvio padrão do modelo dos valores previstos de todas as árvores de regressão.
NLCD TCC:um produto refinado derivado das imagens anuais do TCC de ciência. Ele passa por pós-processamento para reduzir o ruído interanual, destacar tendências de longo prazo e mascarar recursos específicos, como água e agricultura não arbórea.
Cada imagem inclui uma banda de máscara de dados com três valores que representam áreas sem dados (0), cobertura de copa de árvore mapeada(1) e área não processada (2). As áreas não processadas são pixels na área de estudo sem dados de nuvem ou sem sombra de nuvem. Nenhum dado e pixels de área não processada são mascarados em imagens TCC e SE.
Dados e métodos
Desenvolvemos dados de treinamento e modelos de floresta aleatória para CONUS, SEAK, PRUSVI e HAWAII usando o TCC fotointerpretado do Inventário e Análise Florestal (FIA) do USFS como dados de referência. Usamos o Google Earth Engine (GEE) (Gorelick et al., 2017) para processar preditores de LandTrendr e terreno ajustados. Os dados de terreno do Programa de Elevação 3D (3DEP, na sigla em inglês) (Serviço Geológico dos EUA, 2019) incluem elevação, inclinação, seno de aspecto e cosseno de aspecto. Para os EUA continentais, também incluímos a camada de dados de plantações (CDL, na sigla em inglês) como um preditor (Lin et al., 2022).
Usamos imagens de refletância do topo da atmosfera do Nível 1C do Landsat Tier 1 e do Sentinel 2A/2B da Coleção 2 do USGS para produzir composições anuais de medoides. Para garantir a qualidade dos dados, aplicamos vários algoritmos para mascarar nuvens e sombras, incluindo o cFmask (Foga et al., 2017; Zhu e Woodcock, 2012), cloudScore (Chastain et al., 2019), s2cloudless (Sentinel-Hub, 2021), Cloud Score+ (Pasquarella et al., 2023) e TDOM (Chastain et al., 2019). Depois de mascarados, calculamos medoides anuais para criar um único composto sem nuvens para cada ano. Por fim, a série temporal composta foi segmentada temporalmente usando o LandTrendr (Kennedy et al., 2010, 2018; Cohen et al., 2018).
Para o CONUS, usamos 70% dos dados de referência para calibragem e 30% para avaliação independente de erros. Devido à diversidade ecológica do CONUS, dividimos a área de modelagem em 54 blocos (480 km × 480 km). Em computadores locais, criamos um modelo exclusivo de floresta aleatória para cada bloco (Breiman, 2001), treinando-o com dados de referência que se cruzam com uma janela de 5x5 ao redor do bloco central. Em seguida, os modelos foram implantados no GEE para prever a cobertura de nuvens de ponta a ponta. Para regiões OCONUS, usamos uma divisão de 80/20 e desenvolvemos um único modelo de floresta aleatória para cada região.
Additional Resources
Consulte o Resumo dos métodos de TCC ou o artigo acadêmico Science of Remote Sensing para informações detalhadas sobre métodos e avaliação de acurácia.
Consulte o TCC Geodata Clearinghouse (em inglês) para downloads de dados, metadados e documentos de suporte.
A string HAWAII será atualizada para HI na próxima versão de dados v2025.6.
Entre em contato com [sm.fs.tcc@usda.gov] se tiver dúvidas ou solicitações de dados específicas.
Bandas
Bandas
Tamanho do pixel: 30 metros (todas as bandas)
| Nome | Unidades | Tamanho do pixel | Descrição | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Science_Percent_Tree_Canopy_Cover |
% | 30 metros | As saídas brutas do modelo direto. Cada pixel tem um valor médio previsto de cobertura de áreas verdes para cada ano. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Science_Percent_Tree_Canopy_Cover_Standard_Error |
% | 30 metros | O desvio padrão dos valores previstos de todas as árvores de regressão é chamado de erro padrão. Cada pixel tem um erro padrão para cada ano. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
NLCD_Percent_Tree_Canopy_Cover |
% | 30 metros | Para produzir a cobertura de áreas verdes do NLCD, um fluxo de trabalho de pós-processamento é aplicado à saída direta do modelo, que identifica e define valores de pixels sem árvores como zero por cento de cobertura de áreas verdes. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
data_mask |
30 metros | Três valores que representam áreas sem dados, cobertura de áreas verdes mapeadas e área não processada. A área de não processamento é onde os pixels na área de estudo não têm dados disponíveis sem nuvens ou sombras de nuvens para produzir uma saída. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Propriedades de imagens
Propriedades da imagem
| Nome | Tipo | Descrição |
|---|---|---|
| study_area | STRING | No momento, o TCC abrange CONUS, sudeste do Alasca, Porto Rico, Ilhas Virgens Americanas e Havaí. Esta versão contém dados para CONUS, AK, PRUSVI e HAWAII. Valores possíveis: "CONUS, AK, PRUSVI, HAWAII" |
| version | STRING | Esta é a quinta versão do produto TCC lançada no consórcio MRLC, que faz parte do National Land Cover Database (NLCD). |
| startYear | INT | "Ano de início do produto" |
| endYear | INT | "Ano de término do produto" |
| ano | INT | "Ano do produto" |
Termos de Uso
Termos de Uso
O Serviço Florestal do USDA não oferece garantias, expressas ou implícitas, incluindo as garantias de comercialização e adequação a uma finalidade específica, nem assume qualquer responsabilidade legal pela precisão, confiabilidade, integridade ou utilidade desses dados geoespaciais ou pelo uso inadequado ou incorreto deles. Esses dados geoespaciais e mapas ou gráficos relacionados não são documentos legais e não devem ser usados como tal. Os dados e mapas não podem ser usados para determinar título, propriedade, descrições ou limites legais, jurisdição legal ou restrições que possam estar em vigor em terras públicas ou privadas. Os riscos naturais podem ou não ser representados nos dados e mapas, e os usuários de terra precisam ter cautela. Os dados são dinâmicos e podem mudar com o tempo. O usuário é responsável por verificar as limitações dos dados geoespaciais e usá-los de acordo com elas.
Esses dados foram coletados com financiamento do governo dos EUA e podem ser usados sem permissões ou taxas adicionais. Se você usar esses dados em uma publicação, apresentação ou outro produto de pesquisa, use a seguinte citação:
USDA Forest Service. 2025. Cobertura de áreas verdes da USFS v2023.5 (Estados Unidos contíguos e Estados Unidos contíguos externos). Salt Lake City, Utah.
Citações
USDA Forest Service. 2025. Cobertura de áreas verdes da USFS v2023.5 (Estados Unidos contíguos e Estados Unidos contíguos externos). Salt Lake City, Utah.
Breiman, L., 2001. Florestas aleatórias. Em machine learning. Springer, 45: 5-32 doi:10.1023/A:1010933404324
Chastain, R., Housman, I., Goldstein, J., Finco, M., e Tenneson, K., 2019. Comparação empírica entre sensores das características espectrais do Sentinel-2A e 2B MSI, do Landsat-8 OLI e do Landsat-7 ETM no topo da atmosfera nos Estados Unidos contíguos. Em Remote Sensing of Environment. Science Direct, 221: 274-285 doi:10.1016/j.rse.2018.11.012
Cohen, W. B., Yang, Z., Healey, S. P., Kennedy, R. E., e Gorelick, N., 2018. Um conjunto multiespectral do LandTrendr para detecção de distúrbios florestais. Em Remote Sensing of Environment. Science Direct, 205: 131-140 doi:10.1016/j.rse.2017.11.015
Foga, S., Scaramuzza, P.L., Guo, S., Zhu, Z., Dilley, R.D., Beckmann, T., Schmidt, G.L., Dwyer, J.L., Hughes, M.J., Laue, B., 2017. Comparação e validação de algoritmos de detecção de nuvens para produtos de dados operacionais do Landsat. Em Remote Sensing of Environment. Science Direct, 194: 379-390 doi:10.1016/j.rse.2017.03.026
Kennedy, R. E., Yang, Z., and Cohen, W. B., 2010. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr: algoritmos de segmentação temporal. Em Remote Sensing of Environment. Science Direct, 114(12): 2897-2910 doi:10.1016/j.rse.2010.07.008
Kennedy, R., Yang, Z., Gorelick, N., Braaten, J., Cavalcante, L., Cohen, W., and Healey, S., 2018. Implementação do algoritmo LandTrendr no Google Earth Engine. Em sensoriamento remoto. MDPI, 10(5): 691 doi:10.3390/rs10050691
Lin, L.; Di, L.; Zhang, C.; Guo, L.; Di, Y.; Li, H.; Yang, A. 2022. Validação e refinamento da camada de dados de lavouras usando um algoritmo de árvore de decisão espaço-temporal. Dados científicos. 9(1): 63. doi:10.3390/rs10050691
Pasquarella, V. J., Brown, C. F., Czerwinski, W. e Rucklidge, W. J., 2023. Avaliação abrangente da qualidade de imagens de satélite ópticas usando aprendizado de vídeo com supervisão fraca. Anais da Conferência IEEE/CVF sobre Visão Computacional e Reconhecimento de Padrões. 2124-2134. doi:10.1109/cvprw59228.2023.00206
Sentinel-Hub, 2021. Detector de nuvens do Sentinel 2. [On-line]. Disponível em: https://github.com/sentinel-hub/sentinel2-cloud-detector
U.S. Geological Survey, 2019. Modelo digital de elevação do programa de elevação 3D do USGS, acessado em agosto de 2022 em https://developers.google.com/earth-engine/datasets/catalog/USGS_3DEP_10m
Zhu, Z. e Woodcock, C. E., 2012. Detecção de nuvens e sombras de nuvens com base em objetos em imagens do Landsat. Em Remote Sensing of Environment. Science Direct, 118: 83-94 doi:10.1016/j.rse.2011.10.028
Identificadores DOI
- https://doi.org/10.1016/j.rse.2010.07.008
- https://doi.org/10.1016/j.rse.2011.10.028
- https://doi.org/10.1016/j.rse.2017.03.026
- https://doi.org/10.1016/j.rse.2017.11.015
- https://doi.org/10.1016/j.rse.2018.11.012
- https://doi.org/10.1023/A:1010933404324
- https://doi.org/10.1038/s41597-022-01169-w
- https://doi.org/10.3390/rs10050691
Explore com o Earth Engine
Editor de código (JavaScript)
// Import the tree canopy cover collection var dataset = ee.ImageCollection('USGS/NLCD_RELEASES/2023_REL/TCC/v2023-5'); //Filter collection to 2021 and CONUS study area var tcc = dataset.filter(ee.Filter.calendarRange(2023, 2023,'year')) // range: [1985, 2023] .filter('study_area == "CONUS"') // CONUS, AK, HAWAII, PRUSVI .first(); // TCC palette var tcc_palette = [ 'CDA066', 'D7C29E', 'C2D096', 'B7D692', 'ADDD8E', '78C679', '5CB86B', '41AB5D', '39A156', '329750', '238443', '11763D', '006837', '004529' ] // SE palette var se_palette = [ '000000', 'FFFFFF', ] // Display images on map Map.addLayer(tcc.select('data_mask'), {min:0,max:2}, 'Data Mask',false); Map.addLayer(tcc.select('Science_Percent_Tree_Canopy_Cover'), {min:0,max:60,palette:tcc_palette}, 'Science Percent Tree Canopy Cover'); Map.addLayer(tcc.select('Science_Percent_Tree_Canopy_Cover_Standard_Error'), {min:0,max:4000,palette:se_palette}, 'Science Percent Tree Canopy Cover Standard Error'); Map.addLayer(tcc.select('NLCD_Percent_Tree_Canopy_Cover'), {min:0,max:60,palette:tcc_palette}, 'NLCD Percent Tree Canopy Cover'); Map.setCenter(-98.58, 38.14, 4);