- Veri Kümesi Kullanılabilirliği
- 2015-06-27T00:00:00Z–2026-07-17T05:32:18.692000Z
- Veri Kümesi Üreticisi
- World Resources Institute Google
- Etiketler
Açıklama
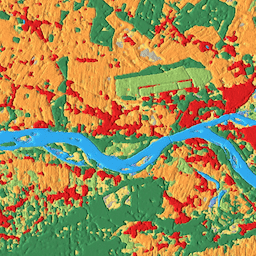
Dynamic World, 10 metre çözünürlüklü, neredeyse anlık (NRT) arazi kullanımı/arazi örtüsü (LULC) veri kümesidir. Bu veri kümesi, dokuz sınıf için sınıf olasılıklarını ve etiket bilgilerini içerir.
Dynamic World tahminleri, 27.06.2015'ten günümüze kadar Sentinel-2 L1C koleksiyonu için kullanılabilir. Sentinel-2'nin yeniden ziyaret sıklığı, enleme bağlı olarak 2-5 gün arasındadır. Dinamik Dünya tahminleri, CLOUDY_PIXEL_PERCENTAGE <= %35 olan Sentinel-2 L1C görüntüleri için oluşturulur. Bulutları ve bulut gölgelerini kaldırmak için tahminler, S2 Bulut Olasılığı, Bulut Yer Değiştirme İndeksi ve Yönlü Mesafe Dönüşümü kombinasyonu kullanılarak maskelenir.
Dynamic World koleksiyonundaki resimler, türetildikleri Sentinel-2 L1C öğe adlarıyla eşleşen adlara sahiptir.Örneğin:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
has a matching Dynamic World image named: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
"Etiket" bandı hariç tüm olasılık bantlarının toplamı 1'dir.
Dynamic World veri kümesi hakkında daha fazla bilgi edinmek ve kompozit oluşturma, bölgesel istatistikleri hesaplama ve zaman serileriyle çalışma örneklerini görmek için Dynamic World'e Giriş adlı eğitici seriyi inceleyin.
Dynamic World sınıfı tahminler, küçük bir hareketli pencereden gelen mekansal bağlam kullanılarak tek görüntülerden elde edildiğinden, kısmen zaman içindeki örtü ile tanımlanan, tahmin edilen arazi örtüleri için en iyi 1 "olasılık" (ör. ekinler), belirgin ayırt edici özelliklerin olmaması durumunda nispeten düşük olabilir. Kuru iklimlerdeki yüksek yansıtma özelliğine sahip yüzeyler, kum ve güneş parlaması gibi unsurlar da bu olguyu gösterebilir.
Yalnızca bir Dinamik Dünya sınıfına ait olduğundan emin olunan pikselleri seçmek için, en iyi tahminin tahmini "olasılığını" eşikleyerek Dinamik Dünya çıkışlarını maskelemeniz önerilir.
Bantlar
Bantlar
Piksel boyutu: 10 metre (tüm bantlar)
| Ad | Min. | Maks. | Piksel Boyutu | Açıklama |
|---|---|---|---|---|
water |
0 | 1 | 10 metre | Suyla tamamen kaplanma olasılığı tahmini |
trees |
0 | 1 | 10 metre | Ağaçlarla tam kaplama olasılığı tahmini |
grass |
0 | 1 | 10 metre | Çimle tamamen kaplanma olasılığı tahmini |
flooded_vegetation |
0 | 1 | 10 metre | Sular altında kalan bitki örtüsünün tam kapsamlı olma olasılığı tahmini |
crops |
0 | 1 | 10 metre | Ürünlere göre tam kapsam olasılığı tahmini |
shrub_and_scrub |
0 | 1 | 10 metre | Çalı ve çalılıklarla tam kaplama olasılığı tahmini |
built |
0 | 1 | 10 metre | Tahmini olarak, yerleşik özelliklere göre tam kapsam olasılığı |
bare |
0 | 1 | 10 metre | Tahmini çıplak kapsama olasılığı |
snow_and_ice |
0 | 1 | 10 metre | Kar ve buzla tamamen kaplanma olasılığı tahmini |
label |
0 | 8 | 10 metre | En yüksek tahmini olasılığa sahip bant dizini |
etiket Sınıf Tablosu
| Değer | Renk | Açıklama |
|---|---|---|
| 0 | #419bdf | su |
| 1 | #397d49 | ağaçlar |
| 2 | #88b053 | çimen |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | ekinler |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | geliştirilen |
| 7 | #a59b8f | çıplak |
| 8 | #b39fe1 | snow_and_ice |
Resim Özellikleri
Görüntü Özellikleri
| Ad | Tür | Açıklama |
|---|---|---|
| dynamicworld_algorithm_version | Dize | Resmi oluşturmak için kullanılan Dynamic World modelini ve çıkarım sürecini benzersiz şekilde tanımlayan sürüm dizesi. |
| qa_algorithm_version | Dize | Görüntüyü oluşturmak için kullanılan bulut maskeleme sürecini benzersiz şekilde tanımlayan sürüm dizesi. |
Kullanım Şartları
Kullanım Şartları
Bu veri kümesi CC-BY 4.0 kapsamında lisanslanmıştır ve şu atıfı gerektirir: "Bu veri kümesi, Google tarafından National Geographic Society ve World Resources Institute iş ortaklığıyla Dynamic World Projesi için üretilmiştir."
[2015-günümüz] yılına ait değiştirilmiş Copernicus Sentinel verileri içerir. Sentinel Verileri Yasal Uyarısı'na bakın.
Alıntılar
Brown, C.F., Brumby, S.P., Guzder-Williams, B. ve diğerleri. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI'lar
Earth Engine ile Keşif
Kod Düzenleyici (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m