- Disponibilità set di dati
- 2015-06-27T00:00:00Z–2026-06-28T06:12:26.067000Z
- Produttore del set di dati
- World Resources Institute Google
- Tag
Descrizione
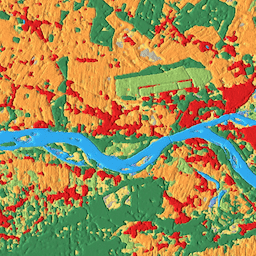
Dynamic World è un set di dati sull'uso e la copertura del suolo (LULC) quasi in tempo reale (NRT) con una risoluzione di 10 metri che include le probabilità di classe e le informazioni sulle etichette per nove classi.
Le previsioni di Dynamic World sono disponibili per la raccolta Sentinel-2 L1C dal 27/06/2015 a oggi. La frequenza di rivisita di Sentinel-2 è compresa tra 2 e 5 giorni a seconda della latitudine. Le previsioni di Dynamic World vengono generate per le immagini Sentinel-2 L1C con CLOUDY_PIXEL_PERCENTAGE <= 35%. Le previsioni vengono mascherate per rimuovere nuvole e ombre delle nuvole utilizzando una combinazione di probabilità di nuvole S2, indice di spostamento delle nuvole e trasformazione della distanza direzionale.
Le immagini della raccolta Dynamic World hanno nomi corrispondenti ai singoli nomi degli asset Sentinel-2 L1C da cui sono state derivate, ad esempio:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
ha un'immagine Dynamic World corrispondente denominata: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Tutte le bande di probabilità, ad eccezione della banda "Etichetta", sommano collettivamente a 1.
Per saperne di più sul set di dati Dynamic World e vedere esempi di generazione di composizioni, calcolo di statistiche regionali e utilizzo delle serie temporali, consulta la serie di tutorial Introduzione a Dynamic World.
Poiché le stime della classe Dynamic World derivano da singole immagini che utilizzano un contesto spaziale da una piccola finestra mobile, le "probabilità" top-1 per le coperture del terreno previste che sono in parte definite dalla copertura nel tempo, come le colture, possono essere relativamente basse in assenza di caratteristiche distintive ovvie. Anche le superfici ad alto ritorno in climi aridi, la sabbia, il riflesso del sole e così via possono mostrare questo fenomeno.
Per selezionare solo i pixel che appartengono con certezza a una classe Dynamic World, è consigliabile mascherare gli output di Dynamic World impostando una soglia per la "probabilità" stimata della previsione top-1.
Bande
Bande
Dimensioni pixel: 10 metri (tutte le bande)
| Nome | Min | Max | Dimensioni pixel | Descrizione |
|---|---|---|---|---|
water |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte dell'acqua |
trees |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte degli alberi |
grass |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte dell'erba |
flooded_vegetation |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte della vegetazione allagata |
crops |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte delle colture |
shrub_and_scrub |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte di arbusti e sterpaglie |
built |
0 | 1 | 10 metri | Probabilità stimata di copertura completa per edificio |
bare |
0 | 1 | 10 metri | Probabilità stimata di copertura completa da parte di bare |
snow_and_ice |
0 | 1 | 10 metri | Probabilità stimata di copertura completa di neve e ghiaccio |
label |
0 | 8 | 10 metri | Indice della banda con la probabilità stimata più alta |
Tabella delle classi delle etichette
| Valore | Colore | Descrizione |
|---|---|---|
| 0 | #419bdf | acqua |
| 1 | #397d49 | palme |
| 2 | #88b053 | erba |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | colture |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | edificato |
| 7 | #a59b8f | spoglio |
| 8 | #b39fe1 | snow_and_ice |
Proprietà immagini
Proprietà immagini
| Nome | Tipo | Descrizione |
|---|---|---|
| dynamicworld_algorithm_version | STRING | La stringa di versione che identifica in modo univoco il modello Dynamic World e il processo di inferenza utilizzato per produrre l'immagine. |
| qa_algorithm_version | STRING | La stringa di versione che identifica in modo univoco il processo di mascheramento delle nuvole utilizzato per produrre l'immagine. |
Termini e condizioni d'uso
Termini e condizioni d'uso
Questo set di dati è concesso in licenza ai sensi della licenza CC-BY 4.0 e richiede la seguente attribuzione: "Questo set di dati è prodotto per il progetto Dynamic World da Google in collaborazione con la National Geographic Society e il World Resources Institute".
Contiene dati modificati di Copernicus Sentinel [2015-oggi]. Consulta l'avviso legale sui dati di Sentinel.
Citazioni
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Esplora con Earth Engine
Editor di codice (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m