- Phạm vi cung cấp tập dữ liệu
- 2015-06-27T00:00:00Z–2026-06-18T04:58:52.224000Z
- Nhà sản xuất tập dữ liệu
- Viện Tài nguyên Thế giới Google
- Thẻ
Mô tả
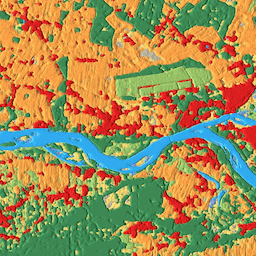
Dynamic World là một tập dữ liệu về Lớp phủ và sử dụng đất (LULC) gần như theo thời gian thực (NRT) có độ phân giải 10 mét, bao gồm xác suất lớp và thông tin nhãn cho 9 lớp.
Dữ liệu dự đoán của Dynamic World có trong bộ sưu tập Sentinel-2 L1C từ ngày 27/6/2015 đến nay. Tần suất truy cập lại của Sentinel-2 là từ 2 đến 5 ngày, tuỳ thuộc vào vĩ độ. Thông tin dự đoán của Dynamic World được tạo cho hình ảnh Sentinel-2 L1C có CLOUDY_PIXEL_PERCENTAGE <= 35%. Các dự đoán được che phủ để loại bỏ mây và bóng mây bằng cách kết hợp Xác suất có mây S2, Chỉ số dịch chuyển đám mây và Biến đổi khoảng cách theo hướng.
Hình ảnh trong bộ sưu tập Dynamic World có tên trùng khớp với tên của từng thành phần Sentinel-2 L1C mà từ đó hình ảnh được lấy ra, ví dụ:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
có một hình ảnh Dynamic World trùng khớp có tên: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Tất cả các dải xác suất, ngoại trừ dải "nhãn", cộng lại sẽ bằng 1.
Để tìm hiểu thêm về tập dữ liệu Dynamic World và xem các ví dụ về cách tạo hình ảnh tổng hợp, tính toán số liệu thống kê theo khu vực và làm việc với chuỗi thời gian, hãy xem loạt hướng dẫn Giới thiệu về Dynamic World.
Vì các số liệu ước tính về lớp Dynamic World được lấy từ các hình ảnh riêng lẻ bằng cách sử dụng bối cảnh không gian từ một cửa sổ di chuyển nhỏ, nên "xác suất" hàng đầu cho các lớp phủ mặt đất được dự đoán (một phần được xác định bằng lớp phủ theo thời gian, chẳng hạn như cây trồng) có thể tương đối thấp khi không có các đặc điểm phân biệt rõ ràng. Các bề mặt có độ phản xạ cao trong môi trường khô cằn, cát, ánh nắng mặt trời, v.v. cũng có thể xuất hiện hiện tượng này.
Để chỉ chọn những pixel chắc chắn thuộc một lớp Dynamic World, bạn nên che đầu ra của Dynamic World bằng cách đặt ngưỡng "xác suất" ước tính của dự đoán hàng đầu.
Băng tần
Băng tần
Kích thước pixel: 10 mét (tất cả các dải tần)
| Tên | Tối thiểu | Tối đa | Kích thước pixel | Mô tả |
|---|---|---|---|---|
water |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của nước |
trees |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của cây |
grass |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của cỏ |
flooded_vegetation |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của thảm thực vật bị ngập lụt |
crops |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của cây trồng |
shrub_and_scrub |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của cây bụi và cây bụi thấp |
built |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của khu vực xây dựng |
bare |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của đất trống |
snow_and_ice |
0 | 1 | 10 mét | Xác suất ước tính về độ che phủ hoàn toàn của tuyết và băng |
label |
0 | 8 | 10 mét | Chỉ mục của dải tần có xác suất ước tính cao nhất |
Bảng phân loại nhãn
| Giá trị | Màu | Mô tả |
|---|---|---|
| 0 | #419bdf | nước |
| 1 | #397d49 | cây cối |
| 2 | #88b053 | cỏ |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | cây trồng |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | khu vực xây dựng |
| 7 | #a59b8f | đất trống |
| 8 | #b39fe1 | tuyết và băng |
Thuộc tính hình ảnh
Thuộc tính hình ảnh
| Tên | Loại | Mô tả |
|---|---|---|
| dynamicworld_algorithm_version | STRING | Chuỗi phiên bản nhận dạng duy nhất mô hình thế giới Dynamic World và quy trình suy luận được dùng để tạo ra hình ảnh. |
| qa_algorithm_version | STRING | Chuỗi phiên bản xác định duy nhất quy trình che mây được dùng để tạo ra hình ảnh. |
Điều khoản sử dụng
Điều khoản sử dụng
Tập dữ liệu này được cấp phép theo CC-BY 4.0 và yêu cầu phải có thông tin ghi công sau: "Tập dữ liệu này được Google tạo ra cho Dự án Dynamic World, hợp tác với Hiệp hội Địa lý Quốc gia và Viện Tài nguyên Thế giới".
Chứa dữ liệu đã được sửa đổi của Copernicus Sentinel [từ năm 2015 đến nay]. Xem Thông báo pháp lý về dữ liệu Sentinel.
Trích dẫn
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Khám phá bằng Earth Engine
Trình chỉnh sửa mã (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m