- Disponibilité de l'ensemble de données
- 2015-06-27T00:00:00Z–2026-07-24T04:35:51.596000Z
- Producteur de l'ensemble de données
- World Resources Institute Google
- Tags
Description
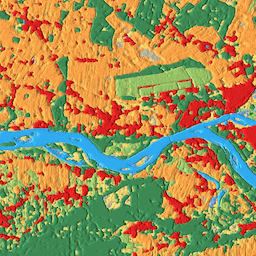
Dynamic World est un ensemble de données d'occupation et d'utilisation des sols (LULC, Land Use/Land Cover) en temps quasi réel (NRT) avec une résolution de 10 m. Il inclut des probabilités de classe et des informations d'étiquettes pour neuf classes.
Les prédictions Dynamic World sont disponibles pour la collection Sentinel-2 L1C du 27/06/2015 à aujourd'hui. La fréquence de revisite de Sentinel-2 est comprise entre 2 et 5 jours, selon la latitude. Les prédictions Dynamic World sont générées pour les images Sentinel-2 L1C avec un filtre CLOUDY_PIXEL_PERCENTAGE inférieur ou égal à 35 %. Les prédictions sont masquées pour supprimer les nuages et les ombres de nuages à l'aide d'une combinaison de la probabilité de nuage S2, de l'indice de déplacement des nuages et de la transformation de distance directionnelle.
Les images de la collection Dynamic World ont des noms correspondant à ceux de chaque élément Sentinel-2 L1C à partir duquel elles ont été dérivées, par exemple :
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
a une image Dynamic World correspondante nommée : ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Toutes les bandes de probabilité, à l'exception de la bande "label", équivalent à un total de 1.
Pour en savoir plus sur l'ensemble de données Dynamic World et voir des exemples de génération de composites, de calcul de statistiques régionales et d'utilisation des séries temporelles, consultez la série de tutoriels Présentation de Dynamic World.
Étant donné que les estimations de classe Dynamic World sont dérivées d'images uniques utilisant un contexte spatial issu d'une fenêtre glissante de taille réduite, les "probabilités" top 1 pour les types d'occupation des sols définis en partie par leur évolution temporelle, comme les cultures, peuvent être comparativement faibles en l'absence de caractéristiques distinctives évidentes. Les surfaces à forte réflectance dans les climats arides, le sable, les reflets solaires, etc. peuvent également présenter ce phénomène.
Pour ne sélectionner que les pixels qui appartiennent de manière fiable à une classe Dynamic World, il est recommandé de masquer les sorties Dynamic World en seuillant la "probabilité" estimée de la prédiction top 1.
Bandes
Bandes de fréquences
Taille des pixels : 10 mètres (toutes les bandes)
| Nom | Min | Max | Taille des pixels | Description |
|---|---|---|---|---|
water |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par l'eau |
trees |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par les arbres |
grass |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par l'herbe |
flooded_vegetation |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par la végétation inondée |
crops |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par les cultures |
shrub_and_scrub |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par les arbustes et les broussailles |
built |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par les zones bâties |
bare |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par le sol nu |
snow_and_ice |
0 | 1 | 10 mètres | Probabilité estimée de couverture complète par la neige et la glace |
label |
0 | 8 | 10 mètres | Index de la bande ayant la probabilité estimée la plus élevée |
Tableau des classes d'étiquettes
| Valeur | Couleur | Description |
|---|---|---|
| 0 | #419bdf | water |
| 1 | #397d49 | trees |
| 2 | #88b053 | grass |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | crops |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | built |
| 7 | #a59b8f | bare |
| 8 | #b39fe1 | snow_and_ice |
Propriétés des images
Propriétés des images
| Nom | Type | Description |
|---|---|---|
| dynamicworld_algorithm_version | STRING | Chaîne de version identifiant de manière unique le modèle Dynamic World et le processus d'inférence utilisés pour générer l'image. |
| qa_algorithm_version | STRING | Chaîne de version identifiant de manière unique le processus de masquage des nuages utilisé pour générer l'image. |
Conditions d'utilisation
Conditions d'utilisation
Cet ensemble de données est concédé sous licence CC-BY 4.0 et nécessite l'attribution suivante : "Cet ensemble de données est produit pour le projet Dynamic World par Google en partenariat avec la National Geographic Society et le World Resources Institute."
Contient des données Copernicus Sentinel modifiées [2015 à aujourd'hui]. Consultez les mentions légales concernant les données Sentinel.
Citations
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Explorer avec Earth Engine
Éditeur de code (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m