- 利用可能なデータセットの期間
- 2015-06-27T00:00:00Z–2026-06-27T16:44:01.801000Z
- データセット プロデューサー
- World Resources Institute Google
- タグ
説明
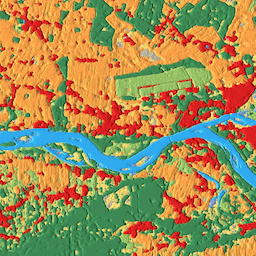
Dynamic World は、10 m のほぼリアルタイム(NRT)の土地利用/土地被覆(LULC)データセットで、9 つのクラスのクラス確率とラベル情報が含まれています。
Dynamic World の予測は、2015-06-27 から現在までの Sentinel-2 L1C コレクションで利用できます。Sentinel-2 の再訪頻度は、緯度によって 2 ~ 5 日です。Dynamic World の予測は、CLOUDY_PIXEL_PERCENTAGE <= 35% の Sentinel-2 L1C 画像に対して生成されます。 予測は、S2 Cloud Probability、Cloud Displacement Index、Directional Distance Transform を組み合わせて、雲と雲の影を削除するようにマスクされます。
Dynamic World コレクションの画像の名前は、派生元の個々の Sentinel-2 L1C アセット名と一致します。例:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
には、 ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT') という名前の対応する Dynamic World 画像があります。
[label] バンドを除くすべての確率バンドの合計は 1 になります。
Dynamic World データセットの詳細、合成の生成、地域統計の計算、時系列の操作の例については、Dynamic World の概要チュートリアル シリーズをご覧ください。
Dynamic World のクラス推定は、小さな移動ウィンドウの空間コンテキストを使用して単一の画像から派生するため、農作物など、時間経過に伴う被覆によって部分的に定義される予測土地被覆のトップ 1 の「確率」は、明確な識別機能がない場合、比較的低くなる可能性があります。乾燥した気候、砂、太陽光の反射などの高反射面でも、この現象が発生する可能性があります。
Dynamic World クラスに確実に属するピクセルのみを選択するには、トップ 1 の予測の推定「確率」を閾値処理して Dynamic World の出力をマスクすることをおすすめします。
バンド
バンド
ピクセルサイズ: 10 メートル(すべてのバンド)
| 名前 | 最小 | 最大 | ピクセルサイズ | 説明 |
|---|---|---|---|---|
water |
0 | 1 | 10 メートル | 水による完全な被覆の推定確率 |
trees |
0 | 1 | 10 メートル | 木による完全な被覆の推定確率 |
grass |
0 | 1 | 10 メートル | 草による完全な被覆の推定確率 |
flooded_vegetation |
0 | 1 | 10 メートル | 水没した植生による完全な被覆の推定確率 |
crops |
0 | 1 | 10 メートル | 農作物による完全な被覆の推定確率 |
shrub_and_scrub |
0 | 1 | 10 メートル | 低木と低木による完全な被覆の推定確率 |
built |
0 | 1 | 10 メートル | 開発による完全な被覆の推定確率 |
bare |
0 | 1 | 10 メートル | 裸地による完全な被覆の推定確率 |
snow_and_ice |
0 | 1 | 10 メートル | 雪と氷による完全な被覆の推定確率 |
label |
0 | 8 | 10 メートル | 推定確率が最も高いバンドのインデックス |
ラベルクラス テーブル
| 値 | 色 | 説明 |
|---|---|---|
| 0 | #419bdf | 水 |
| 1 | #397d49 | 木 |
| 2 | #88b053 | 草 |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | 農作物 |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | 開発 |
| 7 | #a59b8f | 裸地 |
| 8 | #b39fe1 | snow_and_ice |
画像プロパティ検出
画像プロパティ
| 名前 | タイプ | 説明 |
|---|---|---|
| dynamicworld_algorithm_version | STRING | 画像の生成に使用される Dynamic World 世界モデルと推論プロセスを一意に識別するバージョン文字列。 |
| qa_algorithm_version | STRING | 画像の生成に使用されるクラウド マスク処理を一意に識別するバージョン文字列。 |
利用規約
利用規約
このデータセットは CC-BY 4.0 のライセンスで提供されており、次の帰属表示が必要です。「このデータセットは、Google が National Geographic Society および World Resources Institute と提携して Dynamic World プロジェクトのために作成したものです。」
修正された Copernicus Sentinel データ [2015 年~現在] が含まれています。 Sentinel データの法的通知をご覧ください。
引用
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Earth Engine で探索する
コードエディタ(JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab(Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m