- Dataset-Verfügbarkeit
- 2015-06-27T00:00:00Z–2026-06-15T16:48:29.455000Z
- Ersteller des Datasets
- World Resources Institute Google
- Tags
Beschreibung
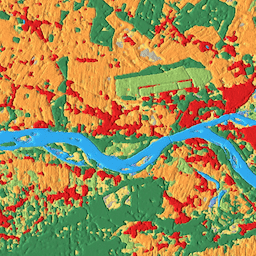
Dynamic World ist ein Dataset zur Landnutzung und Bodenbedeckung (Land Use/Land Cover, LULC) mit einer Auflösung von 10 m und Daten nahezu in Echtzeit (near real-time, NRT). Es enthält Klassenwahrscheinlichkeiten und Labelinformationen für neun Klassen.
Vorhersagen von Dynamic World sind für die Sentinel-2 L1C-Sammlung vom 27.06.2015 bis heute verfügbar. Die Wiederholungsfrequenz von Sentinel-2 liegt je nach Breitengrad zwischen 2 und 5 Tagen. Vorhersagen von Dynamic World werden für Sentinel-2 L1C-Bilder mit CLOUDY_PIXEL_PERCENTAGE <= 35 % generiert. Vorhersagen werden maskiert, um Wolken und Wolkenschatten zu entfernen. Dazu wird eine Kombination aus S2 Cloud Probability, Cloud Displacement Index und Directional Distance Transform verwendet.
Bilder in der Sammlung von Dynamic World haben Namen, die mit den Namen der jeweiligen Assets von Sentinel-2 L1C übereinstimmen, aus denen sie abgeleitet wurden, etwa:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
hat ein entsprechendes Dynamic World-Bild mit dem Namen: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Alle Wahrscheinlichkeitsbereiche mit Ausnahme des Bereichs „Label“ ergeben zusammen 1.
Weitere Informationen zum Dataset von Dynamic World und Beispiele für das Generieren von Composites, das Berechnen von regionalen Statistiken und das Arbeiten mit Zeitreihen finden Sie in der Anleitungsreihe Einführung in Dynamic World.
Die Schätzungen der Klassen von Dynamic World werden aus einzelnen Bildern abgeleitet, wozu der räumliche Kontext eines kleinen, sich bewegenden Fensters verwendet wird. Die größten „Wahrscheinlichkeiten“ in Bezug auf vorhergesagte Bodenbedeckungen können daher vergleichsweise niedrig sein, wenn keine eindeutigen Unterscheidungsmerkmale vorhanden sind, da die Wahrscheinlichkeiten teilweise durch die Bodenbedeckung im Zeitverlauf definiert werden, etwa Nutzpflanzen. Auch stark reflektierende Oberflächen in trockenen Klimazonen, Sand und Sonnenblendung können dieses Phänomen aufweisen.
Wenn Sie nur Pixel auswählen möchten, die mit hoher Wahrscheinlichkeit zu einer Klasse von Dynamic World gehören, empfiehlt es sich, die Ausgaben von Dynamic World zu maskieren, indem Sie für die geschätzte „Wahrscheinlichkeit“ der wichtigsten Vorhersage einen Schwellenwert anwenden.
Bänder
Bänder
Pixelgröße: 10 Meter (alle Bänder)
| Name | Min. | Max. | Pixelgröße | Beschreibung |
|---|---|---|---|---|
water |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Wasser |
trees |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Baumbedeckung |
grass |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Gras |
flooded_vegetation |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Überschwemmungsvegetation |
crops |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Nutzpflanzen |
shrub_and_scrub |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Sträucher und Gebüsch |
built |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Bauten |
bare |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch kahle Flächen |
snow_and_ice |
0 | 1 | 10 Meter | Geschätzte Wahrscheinlichkeit einer vollständigen Bedeckung durch Schnee und Eis |
label |
0 | 8 | 10 Meter | Index des Bereichs mit der höchsten geschätzten Wahrscheinlichkeit |
Klassentabelle für Labels
| Wert | Farbe | Beschreibung |
|---|---|---|
| 0 | #419bdf | Wasser |
| 1 | #397d49 | Bäume |
| 2 | #88b053 | Gras |
| 3 | #7a87c6 | Überschwemmungsvegetation |
| 4 | #e49635 | Nutzpflanzen |
| 5 | #dfc35a | Sträucher und Gebüsch |
| 6 | #c4281b | Bauten |
| 7 | #a59b8f | Kahle Flächen |
| 8 | #b39fe1 | Schnee und Eis |
Bildeigenschaften
Bildeigenschaften
| Name | Typ | Beschreibung |
|---|---|---|
| dynamicworld_algorithm_version | STRING | Der Versionsstring, der das Dynamic World-Modell und den Inferenzprozess eindeutig identifiziert, die zum Erstellen des Bildes verwendet wurden. |
| qa_algorithm_version | STRING | Der Versionsstring, der den Cloud-Maskierungsprozess eindeutig identifiziert, der zum Erstellen des Bildes verwendet wurde. |
Nutzungsbedingungen
Nutzungsbedingungen
Dieses Dataset ist unter CC-BY 4.0 lizenziert und erfordert die folgende Quellenangabe: „Dieses Dataset wurde für das Projekt Dynamic World von Google in Zusammenarbeit mit der National Geographic Society und dem World Resources Institute erstellt.“
Enthält geänderte Copernicus Sentinel-Daten [2015 bis heute]. Weitere Informationen finden Sie in den rechtlichen Hinweisen zu Sentinel-Daten.
Quellenangaben
Brown, C. F., Brumby, S. P., Guzder-Williams, B. et al. (2022): Dynamic World, Near real-time global 10 m land use land cover mapping. In: Sci Data 9, 251. doi:10.1038/s41597-022-01307-4
DOIs
Die Earth Engine nutzen
Code-Editor (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m