- Ketersediaan Set Data
- 2015-06-27T00:00:00Z–2026-07-19T12:04:50.416000Z
- Produsen Set Data
- World Resources Institute Google
- Tag
Deskripsi
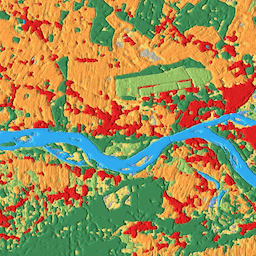
Dynamic World adalah set data Land Use/Land Cover (LULC) yang mendekati real-time (NRT) 10 m yang mencakup probabilitas class dan informasi label untuk sembilan class.
Prediksi Dynamic World tersedia untuk koleksi Sentinel-2 L1C dari 27-06-2015 hingga saat ini. Frekuensi kunjungan ulang Sentinel-2 adalah antara 2-5 hari, bergantung pada lintang. Prediksi Dynamic World dihasilkan untuk gambar Sentinel-2 L1C dengan CLOUDY_PIXEL_PERCENTAGE <= 35%. Prediksi dimasking untuk menghapus awan dan bayangan awan menggunakan kombinasi S2 Cloud Probability, Cloud Displacement Index, dan Directional Distance Transform.
Gambar dalam koleksi Dynamic World memiliki nama yang cocok dengan nama aset Sentinel-2 L1C individual dari mana gambar tersebut berasal, misalnya:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
memiliki gambar Dynamic World yang cocok dengan nama: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Semua band probabilitas kecuali band "label" secara kolektif berjumlah 1.
Untuk mempelajari set data Dynamic World lebih lanjut dan melihat contoh untuk membuat komposit, menghitung statistik regional, dan menggunakan deret waktu, lihat seri tutorial Pengantar Dynamic World.
Mengingat estimasi class Dynamic World berasal dari gambar tunggal menggunakan konteks spasial dari jendela bergerak kecil, "probabilitas" teratas untuk prediksi tutupan lahan yang sebagian ditentukan oleh tutupan dari waktu ke waktu, seperti tanaman, dapat relatif rendah jika tidak ada fitur pembeda yang jelas. Permukaan dengan hasil tinggi di iklim kering, pasir, sunglint, dll. juga dapat menunjukkan fenomena ini.
Untuk hanya memilih piksel yang dengan yakin termasuk dalam class Dynamic World, sebaiknya masking output Dynamic World dengan menetapkan nilai minimum "probabilitas" prediksi teratas.
Band
Band
Ukuran piksel: 10 meter (semua band)
| Nama | Min | Maks | Ukuran Piksel | Deskripsi |
|---|---|---|---|---|
water |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh air |
trees |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh pepohonan |
grass |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh rumput |
flooded_vegetation |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh vegetasi yang tergenang air |
crops |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh tanaman |
shrub_and_scrub |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh semak dan belukar |
built |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh bangunan |
bare |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh lahan kosong |
snow_and_ice |
0 | 1 | 10 meter | Estimasi probabilitas cakupan lengkap oleh salju dan es |
label |
0 | 8 | 10 meter | Indeks band dengan estimasi probabilitas tertinggi |
Tabel Class label
| Nilai | Warna | Deskripsi |
|---|---|---|
| 0 | #419bdf | air |
| 1 | #397d49 | pepohonan |
| 2 | #88b053 | rumput |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | tanaman |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | bangunan |
| 7 | #a59b8f | lahan kosong |
| 8 | #b39fe1 | snow_and_ice |
Properti Gambar
Properti Gambar
| Nama | Jenis | Deskripsi |
|---|---|---|
| dynamicworld_algorithm_version | STRING | String versi yang secara unik mengidentifikasi model Dynamic World dan proses inferensi yang digunakan untuk menghasilkan gambar. |
| qa_algorithm_version | STRING | String versi yang secara unik mengidentifikasi proses masking awan yang digunakan untuk menghasilkan gambar. |
Persyaratan Penggunaan
Persyaratan Penggunaan
Set data ini dilisensikan berdasarkan CC-BY 4.0 dan memerlukan atribusi berikut: "Set data ini diproduksi untuk Dynamic World Project oleh Google dalam kemitraan dengan National Geographic Society dan World Resources Institute."
Berisi data Copernicus Sentinel yang dimodifikasi [2015-sekarang]. Lihat Pemberitahuan Hukum Data Sentinel.
Kutipan
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Mengeksplorasi dengan Earth Engine
Editor Kode (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m