- Phạm vi cung cấp tập dữ liệu
- 2014-10-03T00:00:00Z–2026-07-17T20:08:09Z
- Nhà sản xuất tập dữ liệu
- Liên minh Châu Âu/ESA/Copernicus
- Khoảng thời gian xem lại
- 6 ngày
- Thẻ
Mô tả
Sứ mệnh Sentinel-1 cung cấp dữ liệu từ một thiết bị Radar khẩu độ tổng hợp (SAR) dải tần C có phân cực kép ở tần số 5,405 GHz (dải tần C). Bộ sưu tập này bao gồm các cảnh S1 Ground Range Detected (GRD), được xử lý bằng Sentinel-1 Toolbox để tạo ra một sản phẩm đã hiệu chuẩn và chỉnh hình. Bộ sưu tập này được cập nhật hằng ngày. Các tài sản mới sẽ được nhập trong vòng 2 ngày sau khi có sẵn.
Bộ sưu tập này chứa tất cả các cảnh GRD. Mỗi cảnh có một trong 3 độ phân giải (10, 25 hoặc 40 mét), 4 tổ hợp dải tần (tương ứng với phân cực cảnh) và 3 chế độ thiết bị. Việc sử dụng tập hợp trong ngữ cảnh khảm có thể sẽ yêu cầu lọc xuống một tập hợp đồng nhất gồm các dải tần và thông số. Hãy xem bài viết này để biết thông tin chi tiết về việc sử dụng và xử lý trước dữ liệu thu thập. Mỗi cảnh chứa 1 hoặc 2 trong số 4 dải phân cực có thể có, tuỳ thuộc vào chế độ cài đặt phân cực của thiết bị. Các kiểu kết hợp có thể có là VV dải tần đơn, HH dải tần đơn, VV+VH dải tần kép và HH+HV dải tần kép:
- VV: phân cực đồng nhất, truyền dọc/nhận dọc
- HH: phân cực đồng nhất, truyền ngang/nhận ngang
- VV + VH: phân cực chéo hai dải tần, truyền dọc/nhận ngang
- HH + HV: phân cực chéo hai dải tần, truyền ngang/nhận dọc
Mỗi cảnh cũng bao gồm một dải "góc" bổ sung chứa góc tới gần đúng từ hình elip theo độ tại mọi điểm. Dải tần này được tạo bằng cách nội suy thuộc tính "incidenceAngle" của trường được chia lưới "geolocationGridPoint" được cung cấp cho mỗi tài sản.
Mỗi cảnh được xử lý trước bằng Sentinel-1 Toolbox theo các bước sau:
- Khử nhiễu nhiệt
- Hiệu chuẩn đo bức xạ
- Điều chỉnh địa hình bằng SRTM 30 hoặc ASTER DEM cho những khu vực có vĩ độ lớn hơn 60 độ, nơi không có SRTM. Các giá trị đã được hiệu chỉnh địa hình cuối cùng được chuyển đổi thành decibel thông qua việc chia tỷ lệ logarit (10*log10(x)).
Để biết thêm thông tin về các bước tiền xử lý này, vui lòng tham khảo bài viết Tiền xử lý Sentinel-1. Để biết thêm lời khuyên về cách sử dụng hình ảnh Sentinel-1, hãy xem hướng dẫn của Guido Lemoine về kiến thức cơ bản về SAR và hướng dẫn của Mort Canty về tính năng phát hiện thay đổi SAR.
Bộ sưu tập này được tính toán ngay lập tức. Nếu bạn muốn sử dụng tập hợp cơ bản với các giá trị công suất thô (được cập nhật nhanh hơn), hãy xem COPERNICUS/S1_GRD_FLOAT.
Dải
Băng tần
Kích thước pixel: thay đổi
| Tên | Đơn vị | Tối thiểu | Tối đa | Kích thước pixel | Mô tả |
|---|---|---|---|---|---|
HH |
dB | -50* | 1* | 10 mét | Phân cực đồng nhất, truyền ngang/nhận ngang |
HV |
dB | -50* | 1* | 10 mét | Phân cực chéo hai dải tần, truyền ngang/nhận dọc |
VV |
dB | -50* | 1* | 10 mét | Phân cực đồng nhất, truyền theo chiều dọc/nhận theo chiều dọc |
VH |
dB | -50* | 1* | 10 mét | Phân cực chéo hai dải tần, truyền theo chiều dọc/nhận theo chiều ngang |
angle |
deg | 0* | 90* | 20.000 mét | Góc tới gần đúng từ hình elip |
Thuộc tính hình ảnh
Thuộc tính hình ảnh
| Tên | Loại | Mô tả |
|---|---|---|
| GRD_Post_Processing_facility_country | STRING | Tên quốc gia nơi đặt cơ sở. Bạn có thể định cấu hình phần tử này trong IPF. |
| GRD_Post_Processing_facility_name | STRING | Tên của cơ sở nơi thực hiện bước xử lý. Bạn có thể định cấu hình phần tử này trong IPF. |
| GRD_Post_Processing_facility_organisation | STRING | Tên của tổ chức chịu trách nhiệm về cơ sở. Bạn có thể định cấu hình phần tử này trong IPF. |
| GRD_Post_Processing_facility_site | STRING | Vị trí địa lý của cơ sở. Bạn có thể định cấu hình phần tử này trong IPF. |
| GRD_Post_Processing_software_name | STRING | Tên phần mềm. |
| GRD_Post_Processing_software_version | STRING | Xác định phiên bản phần mềm. |
| GRD_Post_Processing_start | DOUBLE | Thời gian bắt đầu xử lý. |
| GRD_Post_Processing_stop | DOUBLE | Thời gian dừng xử lý. |
| SLC_Processing_facility_country | STRING | Tên quốc gia nơi đặt cơ sở. Bạn có thể định cấu hình phần tử này trong IPF. |
| SLC_Processing_facility_name | STRING | Tên của cơ sở nơi thực hiện bước xử lý. Bạn có thể định cấu hình phần tử này trong IPF. |
| SLC_Processing_facility_organisation | STRING | Tên của tổ chức chịu trách nhiệm về cơ sở. Bạn có thể định cấu hình phần tử này trong IPF. |
| SLC_Processing_facility_site | STRING | Vị trí địa lý của cơ sở. Bạn có thể định cấu hình phần tử này trong IPF. |
| SLC_Processing_software_name | STRING | Tên phần mềm. |
| SLC_Processing_software_version | STRING | Xác định phiên bản phần mềm. |
| SLC_Processing_start | DOUBLE | Thời gian bắt đầu xử lý. |
| SLC_Processing_stop | DOUBLE | Thời gian dừng xử lý. |
| S1TBX_Calibration_Operator_version | STRING | Phiên bản công cụ hiệu chuẩn Sentinel-1 Toolbox. |
| S1TBX_SAR_Processing_version | STRING | Phiên bản công cụ xử lý SAR của Sentinel-1 Toolbox. |
| SNAP_Graph_Processing_Framework_GPF_version | STRING | Phiên bản Nền tảng ứng dụng Sentinel (SNAP). |
| startTimeANX | DOUBLE | Thời gian bắt đầu cảm biến của dữ liệu đầu vào so với điểm giao cắt nút tăng dần. Đây là số lượng thời gian đã trôi qua kể từ khi nút giao cắt của quỹ đạo tăng lên [ms]. |
| stopTimeANX | DOUBLE | Cảm biến dừng thời gian của dữ liệu đầu vào so với giao điểm nút tăng dần. Đây là số lượng thời gian đã trôi qua kể từ khi nút giao cắt của quỹ đạo tăng lên [ms]. |
| nssdcIdentifier | STRING | Xác định duy nhất nhiệm vụ theo các tiêu chuẩn do Trung tâm Dữ liệu Thế giới về Thông tin Vệ tinh (WDC-SI) xác định, có tại đây. |
| familyName | STRING | Tên đầy đủ của nhiệm vụ. Ví dụ: "SENTINEL-1" |
| platform_number | STRING | Giá trị nhận dạng chữ và số của nền tảng trong nhiệm vụ. |
| platformHeading | DOUBLE | Hướng của nền tảng so với hướng Bắc, tính bằng độ |
| gắn mã theo dõi | STRING | Thông tin liên quan đến công cụ trên nền tảng mà dữ liệu được thu thập. |
| instrumentMode | STRING | IW (Interferometric Wide Swath – Dải quét rộng giao thoa), SM (Strip Map – Bản đồ dải) hoặc EW (Extra Wide Swath – Dải quét siêu rộng). Xem thông tin chi tiết về sản phẩm. |
| instrumentSwath | STRING | Danh sách các đường viền nằm trong một sản phẩm. Hầu hết các sản phẩm sẽ chỉ chứa một dải, ngoại trừ các sản phẩm TOPS SLC có 3 hoặc 5 dải. |
| orbitNumber_start | DOUBLE | Số hiệu quỹ đạo tuyệt đối của đường kẻ cũ nhất trong dữ liệu hình ảnh. |
| orbitNumber_stop | DOUBLE | Số quỹ đạo tuyệt đối của đường gần đây nhất trong dữ liệu hình ảnh. |
| relativeOrbitNumber_start | DOUBLE | Số hiệu quỹ đạo tương đối của đường kẻ cũ nhất trong dữ liệu hình ảnh. |
| relativeOrbitNumber_stop | DOUBLE | Số hiệu quỹ đạo tương đối của đường gần đây nhất trong dữ liệu hình ảnh. |
| cycleNumber | DOUBLE | Số thứ tự tuyệt đối của chu kỳ nhiệm vụ mà dữ liệu hình ảnh cũ nhất áp dụng. |
| phaseIdentifier | DOUBLE | Mã nhận dạng của giai đoạn nhiệm vụ mà dữ liệu hình ảnh cũ nhất áp dụng. |
| orbitProperties_pass | STRING | Hướng của quỹ đạo ("ASCENDING" hoặc "DESCENDING") đối với dữ liệu hình ảnh cũ nhất trong sản phẩm (thời điểm bắt đầu của sản phẩm). |
| orbitProperties_ascendingNodeTime | DOUBLE | Giờ UTC của nút tăng dần của quỹ đạo. Phần tử này xuất hiện cho tất cả sản phẩm, ngoại trừ sản phẩm ASAR L2 OCN được tạo từ đầu vào ASAR L1. |
| độ phân giải | STRING | H cho độ phân giải cao hoặc M cho độ phân giải trung bình. |
| resolution_meters | DOUBLE | Độ phân giải tính bằng mét. |
| instrumentConfigurationID | DOUBLE | Mã cấu hình thiết bị (Mã cơ sở dữ liệu Radar) cho dữ liệu này. |
| missionDataTakeID | DOUBLE | Mã nhận dạng duy nhất của dữ liệu được thu thập trong nhiệm vụ. |
| transmitterReceiverPolarisation | STRING_LIST | Phân cực truyền/nhận cho dữ liệu. Có một phần tử cho mỗi tổ hợp Tx/Rx: ['VV'], ['HH'], ['VV', 'VH'] hoặc ['HH', 'HV']. |
| productClass | STRING | Xuất lớp sản phẩm "A" cho Chú thích hoặc "S" cho Chuẩn. |
| productClassDescription | STRING | Nội dung mô tả bằng văn bản về lớp sản phẩm đầu ra. |
| productComposition | STRING | Loại thành phần của sản phẩm này: "Individual" (Riêng lẻ), "Slice" (Lát) hoặc "Assembled" (Lắp ráp). |
| productType | STRING | Loại sản phẩm (cấp hiệu chỉnh) của sản phẩm này. |
| productTimelinessCategory | STRING | Mô tả tính kịp thời bắt buộc của quá trình xử lý. Một trong các lựa chọn sau: NRT-10m, NRT-1h, NRT-3h, Fast-24h, Off-line hoặc Reprocessing |
| sliceProductFlag | STRING | True nếu đây là một phần của một sản phẩm lớn hơn hoặc false nếu đây là một sản phẩm hoàn chỉnh. |
| segmentStartTime | DOUBLE | Thời gian bắt đầu cảm biến của phân đoạn mà lát cắt này thuộc về. Trường này chỉ xuất hiện nếu sliceProductFlag = true |
| sliceNumber | DOUBLE | Số lát tuyệt đối của lát này, bắt đầu từ 1. Trường này chỉ xuất hiện nếu sliceProductFlag = true. |
| totalSlices | DOUBLE | Tổng số lát cắt trong toàn bộ dữ liệu. Trường này chỉ xuất hiện nếu sliceProductFlag = true. |
Điều khoản sử dụng
Điều khoản sử dụng
Việc sử dụng dữ liệu của Sentinel phải tuân thủ Điều khoản và điều kiện về dữ liệu của chương trình Copernicus Sentinel.
Khám phá bằng Earth Engine
Trình chỉnh sửa mã (JavaScript)
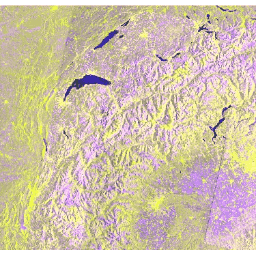
var imgVV = ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(function(image) { var edge = image.lt(-30.0); var maskedImage = image.mask().and(edge.not()); return image.updateMask(maskedImage); }); var desc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')); var asc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')); var spring = ee.Filter.date('2015-03-01', '2015-04-20'); var lateSpring = ee.Filter.date('2015-04-21', '2015-06-10'); var summer = ee.Filter.date('2015-06-11', '2015-08-31'); var descChange = ee.Image.cat( desc.filter(spring).mean(), desc.filter(lateSpring).mean(), desc.filter(summer).mean()); var ascChange = ee.Image.cat( asc.filter(spring).mean(), asc.filter(lateSpring).mean(), asc.filter(summer).mean()); Map.setCenter(5.2013, 47.3277, 12); Map.addLayer(ascChange, {min: -25, max: 5}, 'Multi-T Mean ASC', true); Map.addLayer(descChange, {min: -25, max: 5}, 'Multi-T Mean DESC', true);
import ee import geemap.core as geemap
Colab (Python)
def mask_edge(image): edge = image.lt(-30.0) masked_image = image.mask().And(edge.Not()) return image.updateMask(masked_image) img_vv = ( ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(mask_edge) ) desc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')) asc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')) spring = ee.Filter.date('2015-03-01', '2015-04-20') late_spring = ee.Filter.date('2015-04-21', '2015-06-10') summer = ee.Filter.date('2015-06-11', '2015-08-31') desc_change = ee.Image.cat( desc.filter(spring).mean(), desc.filter(late_spring).mean(), desc.filter(summer).mean(), ) asc_change = ee.Image.cat( asc.filter(spring).mean(), asc.filter(late_spring).mean(), asc.filter(summer).mean(), ) m = geemap.Map() m.set_center(5.2013, 47.3277, 12) m.add_layer(asc_change, {'min': -25, 'max': 5}, 'Multi-T Mean ASC', True) m.add_layer(desc_change, {'min': -25, 'max': 5}, 'Multi-T Mean DESC', True) m