- डेटासेट की उपलब्धता
- 2014-10-03T00:00:00Z–2026-06-13T21:46:35Z
- डेटासेट प्रोड्यूसर
- European Union/ESA/Copernicus
- अपडेट होने की अवधि
- 6 दिन
- टैग
ब्यौरा
सेंटिनल-1 मिशन, डुअल-पोलराइज़ेशन वाले सी-बैंड सिंथेटिक एपर्चर रडार (एसएआर) इंस्ट्रूमेंट से डेटा उपलब्ध कराता है. यह डेटा 5.405GHz (सी बैंड) पर मिलता है. इस कलेक्शन में, S1 ग्राउंड रेंज डिटेक्टेड (GRD) सीन शामिल हैं. इन्हें Sentinel-1 टूलबॉक्स का इस्तेमाल करके प्रोसेस किया गया है, ताकि कैलिब्रेट किया गया, ऑर्थो-करेक्टेड प्रॉडक्ट जनरेट किया जा सके. यह कलेक्शन हर दिन अपडेट किया जाता है. नई ऐसेट उपलब्ध होने के दो दिनों के अंदर, उन्हें शामिल कर लिया जाता है.
इस कलेक्शन में, GRD के सभी सीन शामिल हैं. हर सीन का रिज़ॉल्यूशन तीन में से एक होता है (10, 25 या 40 मीटर). इसमें चार बैंड कॉम्बिनेशन (सीन के पोलराइज़ेशन के हिसाब से) और तीन इंस्ट्रूमेंट मोड होते हैं. मोज़ेक कॉन्टेक्स्ट में कलेक्शन का इस्तेमाल करने के लिए, बैंड और पैरामीटर के एक जैसे सेट को फ़िल्टर करना पड़ सकता है. डेटा इकट्ठा करने, इस्तेमाल करने, और प्रीप्रोसेसिंग के बारे में जानने के लिए, यह लेख पढ़ें. हर सीन में, चार संभावित पोलराइज़ेशन बैंड में से एक या दो बैंड होते हैं. यह इंस्ट्रूमेंट की पोलराइज़ेशन सेटिंग पर निर्भर करता है. संभावित कॉम्बिनेशन ये हैं: सिंगल बैंड VV, सिंगल बैंड HH, ड्यूअल बैंड VV+VH, और ड्यूअल बैंड HH+HV:
- VV: सिंगल को-पोलराइज़ेशन, वर्टिकल ट्रांसमिट/वर्टिकल रिसीव
- HH: सिंगल को-पोलराइज़ेशन, हॉरिज़ॉन्टल ट्रांसमिट/हॉरिज़ॉन्टल रिसीव
- VV + VH: ड्यूअल-बैंड क्रॉस-पोलराइज़ेशन, वर्टिकल ट्रांसमिट/हॉरिज़ॉन्टल रिसीव
- HH + HV: ड्यूअल-बैंड क्रॉस-पोलराइज़ेशन, हॉरिज़ॉन्टल ट्रांसमिट/वर्टिकल रिसीव
हर सीन में एक और 'ऐंगल' बैंड भी शामिल होता है. इसमें हर पॉइंट पर, एलिप्सॉइड से अनुमानित इंसिडेंस ऐंगल (डिग्री में) होता है. इस बैंड को, हर ऐसेट के साथ दिए गए 'geolocationGridPoint' ग्रिड वाले फ़ील्ड की 'incidenceAngle' प्रॉपर्टी को इंटरपोलेट करके जनरेट किया जाता है.
हर सीन को पहले से प्रोसेस किया गया था. इसके लिए, Sentinel-1 Toolbox का इस्तेमाल किया गया था. प्रोसेस करने के लिए, ये चरण अपनाए गए थे:
- थर्मल नॉइज़ कम करने की सुविधा
- रेडियोमेट्रिक कैलिब्रेशन
- 60 डिग्री से ज़्यादा अक्षांश वाले इलाकों के लिए, SRTM 30 या ASTER DEM का इस्तेमाल करके इलाके की ऊंचाई में सुधार किया जाता है. इन इलाकों में SRTM उपलब्ध नहीं है. टेरेन में सुधार करने के बाद मिली वैल्यू को लॉग स्केलिंग (10*log10(x)) के ज़रिए डेसिबल में बदला जाता है.
प्री-प्रोसेसिंग के इन चरणों के बारे में ज़्यादा जानने के लिए, कृपया Sentinel-1 की प्री-प्रोसेसिंग से जुड़ा लेख पढ़ें. Sentinel-1 की इमेज के साथ काम करने के बारे में ज़्यादा सलाह पाने के लिए, एसएआर की बुनियादी बातों के बारे में Guido Lemoine का ट्यूटोरियल और एसएआर में बदलाव का पता लगाने के बारे में Mort Canty का ट्यूटोरियल देखें.
इस कलेक्शन को तुरंत कैलकुलेट किया जाता है. अगर आपको रॉ पावर वैल्यू के साथ अंडरलाइंग कलेक्शन का इस्तेमाल करना है (जो ज़्यादा तेज़ी से अपडेट होता है), तो COPERNICUS/S1_GRD_FLOAT देखें.
बैंड
बैंड
पिक्सल का साइज़: अलग-अलग होता है
| नाम | इकाई | कम से कम | ज़्यादा से ज़्यादा | पिक्सल का साइज़ | ब्यौरा |
|---|---|---|---|---|---|
HH |
dB | -50* | 1* | 10 मीटर | सिंगल को-पोलराइज़ेशन, हॉरिज़ॉन्टल ट्रांसमिट/हॉरिज़ॉन्टल रिसीव |
HV |
dB | -50* | 1* | 10 मीटर | डुअल-बैंड क्रॉस-पोलराइज़ेशन, हॉरिज़ॉन्टल ट्रांसमिट/वर्टिकल रिसीव |
VV |
dB | -50* | 1* | 10 मीटर | सिंगल को-पोलराइज़ेशन, वर्टिकल ट्रांसमिट/वर्टिकल रिसीव |
VH |
dB | -50* | 1* | 10 मीटर | डुअल-बैंड क्रॉस-पोलराइज़ेशन, वर्टिकल ट्रांसमिट/हॉरिज़ॉन्टल रिसीव |
angle |
डिग्री | 0* | 90* | 20,000 मीटर | एलिप्सॉइड से अनुमानित आपतन कोण |
इमेज प्रॉपर्टी
इमेज प्रॉपर्टी
| नाम | टाइप | ब्यौरा |
|---|---|---|
| GRD_Post_Processing_facility_country | स्ट्रिंग | उस देश का नाम जहां सुविधा देने वाली जगह मौजूद है. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| GRD_Post_Processing_facility_name | स्ट्रिंग | उस फ़ैसिलिटी का नाम जहां प्रोसेसिंग की गई थी. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| GRD_Post_Processing_facility_organisation | स्ट्रिंग | उस संगठन का नाम जो सुविधा के लिए ज़िम्मेदार है. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| GRD_Post_Processing_facility_site | स्ट्रिंग | सुविधा की भौगोलिक जगह. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| GRD_Post_Processing_software_name | स्ट्रिंग | सॉफ़्टवेयर का नाम. |
| GRD_Post_Processing_software_version | स्ट्रिंग | सॉफ़्टवेयर वर्शन की पहचान करना. |
| GRD_Post_Processing_start | DOUBLE | प्रोसेसिंग शुरू होने का समय. |
| GRD_Post_Processing_stop | DOUBLE | प्रोसेसिंग बंद होने का समय. |
| SLC_Processing_facility_country | स्ट्रिंग | उस देश का नाम जहां सुविधा देने वाली जगह मौजूद है. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| SLC_Processing_facility_name | स्ट्रिंग | उस फ़ैसिलिटी का नाम जहां प्रोसेसिंग की गई थी. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| SLC_Processing_facility_organisation | स्ट्रिंग | उस संगठन का नाम जो सुविधा के लिए ज़िम्मेदार है. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| SLC_Processing_facility_site | स्ट्रिंग | सुविधा की भौगोलिक जगह. इस एलिमेंट को आईपीएफ़ में कॉन्फ़िगर किया जा सकता है. |
| SLC_Processing_software_name | स्ट्रिंग | सॉफ़्टवेयर का नाम. |
| SLC_Processing_software_version | स्ट्रिंग | सॉफ़्टवेयर वर्शन की पहचान करना. |
| SLC_Processing_start | DOUBLE | प्रोसेसिंग शुरू होने का समय. |
| SLC_Processing_stop | DOUBLE | प्रोसेसिंग बंद होने का समय. |
| S1TBX_Calibration_Operator_version | स्ट्रिंग | Sentinel-1 Toolbox के कैलिब्रेशन टूल का वर्शन. |
| S1TBX_SAR_Processing_version | स्ट्रिंग | Sentinel-1 Toolbox SAR प्रोसेसिंग टूल का वर्शन. |
| SNAP_Graph_Processing_Framework_GPF_version | स्ट्रिंग | Sentinel ऐप्लिकेशन प्लैटफ़ॉर्म (SNAP) वर्शन. |
| startTimeANX | DOUBLE | असेंडिंग नोड क्रॉसिंग के हिसाब से, इनपुट डेटा के सेंसिंग शुरू होने का समय. यह ऑर्बिट असेंडिंग नोड क्रॉसिंग [ms] के बाद से बीता हुआ समय है. |
| stopTimeANX | DOUBLE | असेंडिंग नोड क्रॉसिंग के हिसाब से, इनपुट डेटा के स्टॉप टाइम का पता लगाना. यह ऑर्बिट असेंडिंग नोड क्रॉसिंग [मिलीसेकंड] के बाद से गुज़रे समय की गिनती है. |
| nssdcIdentifier | स्ट्रिंग | यह मिशन की यूनीक तरीके से पहचान करता है. यह पहचान, वर्ल्ड डेटा सेंटर फ़ॉर सैटलाइट इन्फ़ॉर्मेशन (डब्ल्यूडीसी-एसआई) के तय किए गए मानकों के मुताबिक होती है. ये मानक यहां उपलब्ध हैं. |
| familyName | स्ट्रिंग | मिशन का पूरा नाम. उदाहरण के लिए, "SENTINEL-1" |
| platform_number | स्ट्रिंग | मिशन में मौजूद प्लैटफ़ॉर्म का अल्फ़ान्यूमेरिक आइडेंटिफ़ायर. |
| platformHeading | DOUBLE | उत्तर की ओर प्लैटफ़ॉर्म की हेडिंग, डिग्री में |
| इंस्ट्रुमेंट | स्ट्रिंग | उस प्लैटफ़ॉर्म पर मौजूद इंस्ट्रुमेंट से जुड़ी जानकारी जिसने डेटा हासिल किया. |
| instrumentMode | स्ट्रिंग | IW (इंटरफ़ेरोमेट्रिक वाइड स्वैथ), SM (स्ट्रिप मैप) या EW (एक्स्ट्रा वाइड स्वैथ). प्रॉडक्ट के बारे में जानकारी देखें. |
| instrumentSwath | स्ट्रिंग | किसी प्रॉडक्ट में मौजूद स्वैथ की सूची. ज़्यादातर प्रॉडक्ट में सिर्फ़ एक स्वैथ होता है. हालांकि, TOPS SLC प्रॉडक्ट में तीन या पांच स्वैथ होते हैं. |
| orbitNumber_start | DOUBLE | इमेज डेटा में मौजूद सबसे पुरानी लाइन का ऐब्सलूट ऑर्बिट नंबर. |
| orbitNumber_stop | DOUBLE | इमेज डेटा में मौजूद सबसे नई लाइन का ऐब्सलूट ऑर्बिट नंबर. |
| relativeOrbitNumber_start | DOUBLE | इमेज डेटा में मौजूद सबसे पुरानी लाइन का रिलेटिव ऑर्बिट नंबर. |
| relativeOrbitNumber_stop | DOUBLE | इमेज डेटा में मौजूद सबसे नई लाइन का रिलेटिव ऑर्बिट नंबर. |
| cycleNumber | DOUBLE | मिशन साइकल का क्रम संख्या, जिस पर सबसे पुराना इमेज डेटा लागू होता है. |
| phaseIdentifier | DOUBLE | मिशन के उस फ़ेज़ का आईडी जिस पर सबसे पुराना इमेज डेटा लागू होता है. |
| orbitProperties_pass | स्ट्रिंग | प्रॉडक्ट में मौजूद सबसे पुराने इमेज डेटा (प्रॉडक्ट की शुरुआत) के लिए, ऑर्बिट की दिशा ('ASCENDING' या 'DESCENDING'). |
| orbitProperties_ascendingNodeTime | DOUBLE | ऑर्बिट के असेंडिंग नोड का यूटीसी समय. यह एलिमेंट, ASAR L2 OCN प्रॉडक्ट को छोड़कर सभी प्रॉडक्ट के लिए मौजूद होता है. ASAR L2 OCN प्रॉडक्ट, ASAR L1 इनपुट से जनरेट होते हैं. |
| रिज़ॉल्यूशन | स्ट्रिंग | ज़्यादा के लिए H या मीडियम के लिए M. |
| resolution_meters | DOUBLE | मीटर में रिज़ॉल्यूशन. |
| instrumentConfigurationID | DOUBLE | इस डेटा के लिए, इंस्ट्रूमेंट कॉन्फ़िगरेशन आईडी (राडार डेटाबेस आईडी). |
| missionDataTakeID | DOUBLE | मिशन में मौजूद डेटाटेक का यूनीक आईडी. |
| transmitterReceiverPolarisation | STRING_LIST | डेटा के लिए ट्रांसमिट/रिसीव पोलराइज़ेशन. हर Tx/Rx कॉम्बिनेशन के लिए एक एलिमेंट होता है: ['VV'], ['HH'], ['VV', 'VH'] या ['HH', 'HV']. |
| productClass | स्ट्रिंग | एनोटेशन के लिए प्रॉडक्ट क्लास "A" या स्टैंडर्ड के लिए "S" को आउटपुट करें. |
| productClassDescription | स्ट्रिंग | आउटपुट प्रॉडक्ट क्लास की जानकारी देने वाला टेक्स्ट. |
| productComposition | स्ट्रिंग | इस प्रॉडक्ट का कंपोज़िशन टाइप: "इंडिविजुअल", "स्लाइस" या "असेंबल किया गया". |
| productType | स्ट्रिंग | इस प्रॉडक्ट का प्रॉडक्ट टाइप (सुधार का लेवल). |
| productTimelinessCategory | स्ट्रिंग | इससे, प्रोसेस करने के लिए ज़रूरी समय के बारे में पता चलता है. इनमें से कोई एक: NRT-10m, NRT-1h, NRT-3h, Fast-24h, Off-line या Reprocessing |
| sliceProductFlag | स्ट्रिंग | अगर यह किसी बड़े प्रॉडक्ट का हिस्सा है, तो वैल्यू को 'सही' पर सेट करें. अगर यह पूरा प्रॉडक्ट है, तो वैल्यू को 'गलत' पर सेट करें. |
| segmentStartTime | DOUBLE | यह स्लाइस जिस सेगमेंट से जुड़ा है उसके शुरू होने का समय. यह फ़ील्ड सिर्फ़ तब मौजूद होता है, जब sliceProductFlag = true |
| sliceNumber | DOUBLE | स्लाइस का यह नंबर, स्लाइस के क्रम में इसकी पोज़िशन दिखाता है. यह क्रम 1 से शुरू होता है. यह फ़ील्ड सिर्फ़ तब मौजूद होता है, जब sliceProductFlag = true हो. |
| totalSlices | DOUBLE | पूरे डेटा टेक में स्लाइस की कुल संख्या. यह फ़ील्ड सिर्फ़ तब मौजूद होता है, जब sliceProductFlag = true. |
इस्तेमाल की शर्तें
इस्तेमाल की शर्तें
Sentinel डेटा का इस्तेमाल, Copernicus Sentinel डेटा के इस्तेमाल से जुड़े नियम और शर्तों से नियंत्रित होता है.
Earth Engine की मदद से एक्सप्लोर करें
कोड एडिटर (JavaScript)
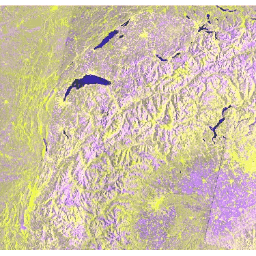
var imgVV = ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(function(image) { var edge = image.lt(-30.0); var maskedImage = image.mask().and(edge.not()); return image.updateMask(maskedImage); }); var desc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')); var asc = imgVV.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')); var spring = ee.Filter.date('2015-03-01', '2015-04-20'); var lateSpring = ee.Filter.date('2015-04-21', '2015-06-10'); var summer = ee.Filter.date('2015-06-11', '2015-08-31'); var descChange = ee.Image.cat( desc.filter(spring).mean(), desc.filter(lateSpring).mean(), desc.filter(summer).mean()); var ascChange = ee.Image.cat( asc.filter(spring).mean(), asc.filter(lateSpring).mean(), asc.filter(summer).mean()); Map.setCenter(5.2013, 47.3277, 12); Map.addLayer(ascChange, {min: -25, max: 5}, 'Multi-T Mean ASC', true); Map.addLayer(descChange, {min: -25, max: 5}, 'Multi-T Mean DESC', true);
import ee import geemap.core as geemap
Colab (Python)
def mask_edge(image): edge = image.lt(-30.0) masked_image = image.mask().And(edge.Not()) return image.updateMask(masked_image) img_vv = ( ee.ImageCollection('COPERNICUS/S1_GRD') .filter(ee.Filter.listContains('transmitterReceiverPolarisation', 'VV')) .filter(ee.Filter.eq('instrumentMode', 'IW')) .select('VV') .map(mask_edge) ) desc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'DESCENDING')) asc = img_vv.filter(ee.Filter.eq('orbitProperties_pass', 'ASCENDING')) spring = ee.Filter.date('2015-03-01', '2015-04-20') late_spring = ee.Filter.date('2015-04-21', '2015-06-10') summer = ee.Filter.date('2015-06-11', '2015-08-31') desc_change = ee.Image.cat( desc.filter(spring).mean(), desc.filter(late_spring).mean(), desc.filter(summer).mean(), ) asc_change = ee.Image.cat( asc.filter(spring).mean(), asc.filter(late_spring).mean(), asc.filter(summer).mean(), ) m = geemap.Map() m.set_center(5.2013, 47.3277, 12) m.add_layer(asc_change, {'min': -25, 'max': 5}, 'Multi-T Mean ASC', True) m.add_layer(desc_change, {'min': -25, 'max': 5}, 'Multi-T Mean DESC', True) m