- 資料集開放期間
- 2015-03-31T12:00:00Z–2023-12-03T12:00:00Z
- 資料集產生者
- Google 和 NSIDC
- 觀測頻率
- 1 天
- 標記
說明
2023 年 12 月 4 日起的資料可在「NASA/SMAP/SPL3SMP_E/006」集合中取得。
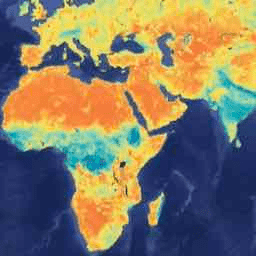
這項第 3 級 (L3) 土壤濕度產品提供全球地表狀況的每日複合資料,這些資料是由土壤濕度主動被動 (SMAP) L 波段輻射儀擷取。這裡的每日資料是從降軌 (當地太陽時上午 6 點) 和升軌 (當地太陽時下午 6 點) 收集而來。
SMAP 任務是軌道觀測計畫,旨在測量地球各地表層土壤中的水量。詳情請參閱SMAP 手冊。這項服務於 2015 年 1 月推出,並於 2015 年 4 月開始運作。雷達儀器因雷達電源供應器故障,於 2015 年初停止運作,但仍收集了近 3 個月的科學資料。SMAP 於 2018 年完成為期三年的主要任務階段,此後便進入延期作業階段。
SMAP 每 2 到 3 天會測量一次土壤濕度。這項技術可觀察全球各地隨時間發生的變化,從大型風暴到季節性變化,都能透過重複測量來掌握。
SMAP 會測量地球上未結冰或未被水覆蓋的區域,瞭解土壤表層的水量。此外,也會區分結冰或融冰的地面。在地面未結冰的情況下,SMAP 會測量全球各地土壤中礦物、岩石物質和有機顆粒之間的水量 (SMAP 會測量地表頂層的液態水,但無法測量冰)。
資料會先使用 GDAL 程式庫轉換為地理座標,再擷取至 Google Earth Engine。
如需其他文件和演算法詳細資料,請參閱「SMAP L3 Soil Moisture User Guide」和相關參考資料。
頻帶
波段
像素大小:9000 公尺 (所有頻帶)
| 名稱 | 單位 | 最小值 | 最大值 | 像素大小 | 說明 |
|---|---|---|---|---|---|
soil_moisture_am |
體積分數 | 9000 公尺 | 從 9 公里網格單元的垂直極化亮度溫度 (已解聚/縮放) 擷取的土壤濕度估計值;上午通過 |
||
tb_h_corrected_am |
K | 0 | 330 | 9000 公尺 | 水平偏振亮溫的加權平均值。如果水份比例低於 0.9 (否則不會套用校正),這個值代表校正後的陸地亮度溫度;如果水份比例高於 0.1 (否則不會套用校正),這個值代表校正後的水亮度溫度;上午通過 |
tb_v_corrected_am |
K | 0 | 330 | 9000 公尺 | 垂直極化亮溫的加權平均值。如果水份比例低於 0.9 (否則不會套用校正),這個值代表校正後的陸地亮度溫度;如果水份比例高於 0.1 (否則不會套用校正),這個值代表校正後的水亮度溫度;上午通過 |
vegetation_water_content_am |
公斤/公尺^2 | 0 | 30 | 9000 公尺 | 9 公里空間尺度下的植被含水量。使用基準演算法時,這個參數會做為 SPL2SMAP 處理軟體的輸入輔助資料參數。下方的有效最小值和最大值僅供參考,實際情況可能因進一步分析而有所不同。AM overpass |
retrieval_qual_flag_am |
0 | 65536 | 9000 公尺 | 0 = 通過:土壤濕度品質可接受; 1 = 失敗:土壤濕度品質不可接受;AM 越境 |
|
tb_qual_flag_h_am |
0 | 65536 | 9000 公尺 | 0= 亮度溫度品質不佳; 1= 亮度溫度品質尚可;上午通過 |
|
tb_qual_flag_v_am |
0 | 65536 | 9000 公尺 | 0= 亮度溫度品質不佳; 1= 亮度溫度品質尚可;上午通過 |
|
soil_moisture_pm |
體積分數 | 9000 公尺 | 從 9 公里網格單元中,擷取垂直極化亮度溫度經過分解/縮放的土壤濕度估計值;PM 衛星通過 |
||
tb_h_corrected_pm |
K | 0 | 330 | 9000 公尺 | 水平偏振亮溫的加權平均值。如果水份比例低於 0.9 (否則不會套用修正),這個值代表修正後的陸地亮度溫度;如果水份比例高於 0.1 (否則不會套用修正),這個值代表修正後的水亮度溫度;PM 越境 |
tb_v_corrected_pm |
K | 0 | 330 | 9000 公尺 | 垂直極化亮溫的加權平均值。如果水份比例低於 0.9 (否則不會套用修正),這個值代表修正後的陸地亮度溫度;如果水份比例高於 0.1 (否則不會套用修正),這個值代表修正後的水亮度溫度;PM 越境 |
vegetation_water_content_pm |
公斤/公尺^2 | 0 | 30 | 9000 公尺 | 9 公里空間尺度下的植被含水量。使用基準演算法時,這個參數會做為 SPL2SMAP 處理軟體的輸入輔助資料參數。下方的有效最小值和最大值僅供參考,實際情況可能因進一步分析而有所不同。PM overpass |
retrieval_qual_flag_pm |
0 | 65536 | 9000 公尺 | 0 = Pass:土壤濕度品質尚可; 1 = Fail:土壤濕度品質不佳;PM 越過 |
|
tb_qual_flag_h_pm |
0 | 65536 | 9000 公尺 | 0= 亮度溫度品質不佳; 1= 亮度溫度品質尚可;PM 越境 |
|
tb_qual_flag_v_pm |
0 | 65536 | 9000 公尺 | 0= 亮度溫度品質不佳; 1= 亮度溫度品質尚可;PM 越境 |
|
soil_moisture_am_anomaly |
9000 公尺 | 實驗版。以資產日期為中心,30 天平均「soil_moisture_am」與 2015 年至今 (不含資產年份) 相同 30 天期間平均值的差異。 如要瞭解異常狀況的計算方式,請參閱這項指令碼。 |
|||
soil_moisture_pm_anomaly |
9000 公尺 | 實驗版。以資產日期為中心,過去 30 天的「soil_moisture_pm」平均值與 2015 年至今 (不含資產年份) 相同 30 天期間的平均值之間的差異。 如要瞭解異常狀況的計算方式,請參閱這項指令碼。 |
使用條款
使用條款
這個資料集屬於公有領域內容,使用和散布均不受任何限制。詳情請參閱 NASA 的地球科學資料和資訊政策。
參考資料
**O'Neill, P. E.、S. Chan, E. G. Njoku, T. Jackson, R. Bindlish, J. Chaubell 和 A. Colliander。2021 年,SMAP Enhanced L3 Radiometer Global and Polar Grid Daily 9 km EASE-Grid Soil Moisture,第 5 版。 [Indicate subset used]。美國科羅拉多州波爾德。NASA National Snow and Ice Data Center Distributed Active Archive Center. doi:10.5067/4DQ54OUIJ9DL
Entekhabi et al., 2014 D. Entekhabi, S. Yueh, P. O'Neill, K. Kellogg 等人撰寫的 SMAP 手冊 - Soil Moisture Active Passive:從太空繪製土壤濕度和凍融地圖。SMAP Project, Jet Propulsion Laboratory, Pasadena, CA (2014) SMAP Handbook
Chan, S. K.、R. Bindlish, P. E. O'Neill, E. Njoku, T. Jackson, A. Colliander, F. Chen, M. Burgin, S. Dunbar, J. Piepmeier, S. Yueh, D. Entekhabi, M. H. Cosh, T. Caldwell, J. Walker, X. Wu, A. Berg, T. Rowlandson, A. Pacheco, H. McNairn, M. Thibeault, J. Martinez-Fernandez, A. Gonzalez-Zamora, M. Seyfried, D. Bosch, P. Starks, D. Goodrich, J. Prueger, M. Palecki, E. E. Small, M. Zreda, J.-C. Calvet, W. T. Crow 和 Y. Kerr. 2016 年。"Assessment of the SMAP Passive Soil Moisture Product" IEEE Transactions on Geoscience and Remote Sensing, 54 (8): 4994-5007 10.1109/tgrs.2016.2561938
Chan, S.、R. Bindlish, P. O'Neill, T. Jackson, E. Njoku, S. Dunbar, J. Chaubell, J. Piepmeier, S. Yueh, D. Entekhabi, A. Colliander, F. Chen, M. Cosh, T. Caldwell, J. Walker, A. Berg, H. McNairn, M. Thibeault, J. Martínez-Fernández, F. Uldall, M. Seyfried, D. Bosch, P. Starks, C. Holifield Collins, J. Prueger、 R. van der Velde、J. Asanuma, M. Palecki, E. Small, M. Zreda, J. Calvet, W. Crow 和 Y. Kerr. 2018 年。 「Development and assessment of the SMAP enhanced passive soil moisture product.」(SMAP 強化被動土壤濕度產品的開發與評估)。Remote Sensing of Environment, 204: 931-941 10.1016/j.rse.2017.08.025
Chaubell, M. J. J. Asanuma, A. A. Berg, D. D. Bosch, T. Caldwell, M. H. Cosh, C. H. Collins, J. Martinez-Fernandez, M. Seyfried, P. J. Starks, Z. Su, S. H. Yueh, M. Thibeault, J. Walker, R. S. Dunbar, A. Colliander, F. Chen, S. K. Chan, D. Entekhabi, R. Bindlish 和 P. E. O'Neill。2020 年。「Improved SMAP Dual-Channel Algorithm for the Retrieval of Soil Moisture.」IEEE Transactions on Geoscience and Remote Sensing, 1-12 10.1109/tgrs.2019.2959239
DOI
使用 Earth Engine 探索
程式碼編輯器 (JavaScript)
var dataset = ee.ImageCollection('NASA/SMAP/SPL3SMP_E/005') .filter(ee.Filter.date('2017-04-01', '2017-04-30')); var soilMositureSurface = dataset.select('soil_moisture_am'); var soilMositureSurfaceVis = { min: 0.0, max: 0.5, palette: ['0300ff', '418504', 'efff07', 'efff07', 'ff0303'], }; Map.setCenter(-6.746, 46.529, 2); Map.addLayer(soilMositureSurface, soilMositureSurfaceVis, 'Soil Mositure');