- Dostępność zbioru danych
- 2015-06-27T00:00:00Z–2026-06-25T09:12:37.277000Z
- Dostawca zbioru danych
- World Resources Institute Google
- Tagi
Opis
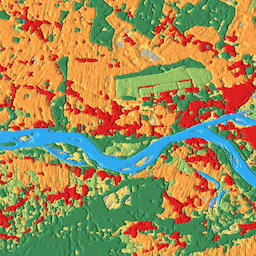
Dynamic World to zbiór danych o użytkowaniu i pokryciu terenu (LULC) w czasie zbliżonym do rzeczywistego (NRT) o rozdzielczości 10 m, który zawiera prawdopodobieństwa klas i informacje o etykietach dla 9 klas.
Prognozy Dynamic World są dostępne dla kolekcji Sentinel-2 L1C od 27 czerwca 2015 r. do dziś. Częstotliwość ponownych wizyt satelity Sentinel-2 wynosi od 2 do 5 dni w zależności od szerokości geograficznej. Prognozy Dynamic World są generowane dla obrazów Sentinel-2 L1C, w których CLOUDY_PIXEL_PERCENTAGE <= 35%. Prognozy są maskowane w celu usunięcia chmur i cieni chmur za pomocą kombinacji prawdopodobieństwa wystąpienia chmur S2, indeksu przemieszczenia chmur i kierunkowej transformacji odległości.
Obrazy w kolekcji Dynamic World mają nazwy zgodne z nazwami poszczególnych komponentów Sentinel-2 L1C, z których pochodzą, np.:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
ma pasujący obraz Dynamic World o nazwie: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
Wszystkie przedziały prawdopodobieństwa z wyjątkiem przedziału „etykieta” sumują się do 1.
Aby dowiedzieć się więcej o zbiorze danych Dynamic World i zobaczyć przykłady generowania kompozytów, obliczania statystyk regionalnych i pracy z szeregami czasowymi, zapoznaj się z serią samouczków Wprowadzenie do Dynamic World.
Szacunki klasy Dynamic World są uzyskiwane na podstawie pojedynczych obrazów z użyciem kontekstu przestrzennego z małego ruchomego okna. „Prawdopodobieństwa” top-1 dla przewidywanych pokryć terenu, które są częściowo definiowane przez pokrycie w czasie, np. uprawy, mogą być stosunkowo niskie w przypadku braku oczywistych cech wyróżniających. Podobne zjawisko może wystąpić w przypadku powierzchni o wysokim współczynniku odbicia w klimacie suchym, na piasku, w przypadku odblasków od słońca itp.
Aby wybrać tylko piksele, które z dużym prawdopodobieństwem należą do klasy Dynamic World, zalecamy zamaskowanie danych wyjściowych Dynamic World przez określenie progu szacowanego „prawdopodobieństwa” prognozy o najwyższym prawdopodobieństwie.
Pasma
Pasma
Rozmiar piksela: 10 m (wszystkie pasma)
| Nazwa | Minimum | Maks. | Rozmiar piksela | Opis |
|---|---|---|---|---|
water |
0 | 1 | 10 metrów | Szacunkowe prawdopodobieństwo całkowitego pokrycia przez wodę |
trees |
0 | 1 | 10 metrów | Szacunkowe prawdopodobieństwo pełnego pokrycia przez drzewa |
grass |
0 | 1 | 10 metrów | Szacowane prawdopodobieństwo całkowitego pokrycia trawą |
flooded_vegetation |
0 | 1 | 10 metrów | Szacunkowe prawdopodobieństwo całkowitego pokrycia przez zalaną roślinność |
crops |
0 | 1 | 10 metrów | Szacunkowe prawdopodobieństwo pełnego pokrycia przez uprawy |
shrub_and_scrub |
0 | 1 | 10 metrów | Szacunkowe prawdopodobieństwo pełnego pokrycia przez krzewy i zarośla |
built |
0 | 1 | 10 metrów | Szacunkowe prawdopodobieństwo pełnego pokrycia przez zbudowane |
bare |
0 | 1 | 10 metrów | Szacowane prawdopodobieństwo pełnego pokrycia przez bare |
snow_and_ice |
0 | 1 | 10 metrów | Szacowane prawdopodobieństwo całkowitego pokrycia śniegiem i lodem |
label |
0 | 8 | 10 metrów | Indeks przedziału o najwyższym szacowanym prawdopodobieństwie |
Tabela klasy etykiety
| Wartość | Kolor | Opis |
|---|---|---|
| 0 | #419bdf | woda |
| 1 | #397d49 | drzewa |
| 2 | #88b053 | trawa |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | upraw |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | zbudowany, |
| 7 | #a59b8f | goły, |
| 8 | #b39fe1 | snow_and_ice |
Właściwości obrazu
Właściwości obrazu
| Nazwa | Typ | Opis |
|---|---|---|
| dynamicworld_algorithm_version | CIĄG ZNAKÓW | Ciąg znaków wersji jednoznacznie identyfikujący model świata Dynamic World i proces wnioskowania użyty do wygenerowania obrazu. |
| qa_algorithm_version | CIĄG ZNAKÓW | Ciąg wersji jednoznacznie identyfikujący proces maskowania chmur użyty do utworzenia obrazu. |
Warunki korzystania z usługi
Warunki korzystania z usługi
Ten zbiór danych jest objęty licencją CC-BY 4.0 i wymaga podania następującego atrybutu: „Ten zbiór danych został opracowany na potrzeby projektu Dynamic World przez Google we współpracy z National Geographic Society i World Resources Institute”.
Zawiera zmodyfikowane dane z satelit Copernicus Sentinel [od 2015 r.]. Zapoznaj się z informacjami prawnymi dotyczącymi danych z satelitów Sentinel.
Cytaty
Brown, C.F., Brumby, S.P., Guzder-Williams, B. i in. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Odkrywaj za pomocą Earth Engine
Edytor kodu (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m