설명
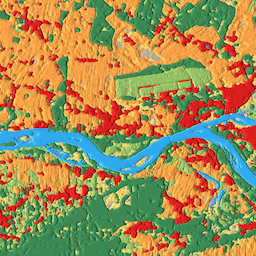
Dynamic World는 9개 클래스의 클래스 확률과 라벨 정보를 포함하는 10m 거의 실시간 (NRT) 토지 이용/토지 피복 (LULC) 데이터 세트입니다.
Dynamic World 예측은 2015년 6월 27일부터 현재까지의 Sentinel-2 L1C 컬렉션에 사용할 수 있습니다. Sentinel-2의 재방문 빈도는 위도에 따라 2~5일입니다. Dynamic World 예측은 CLOUDY_PIXEL_PERCENTAGE가 35% 이하인 Sentinel-2 L1C 이미지에 대해 생성됩니다. 예측은 S2 구름 확률, 구름 변위 지수, 방향 거리 변환의 조합을 사용하여 구름과 구름 그림자를 제거하도록 마스킹됩니다.
Dynamic World 컬렉션의 이미지에는 파생된 개별 Sentinel-2 L1C 애셋 이름과 일치하는 이름이 있습니다(예:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT')라는 이름의 일치하는 Dynamic World 이미지가 있습니다.
'라벨' 범위를 제외한 모든 확률 범위의 합계는 1입니다.
Dynamic World 데이터 세트에 대해 자세히 알아보고 컴포짓 생성, 지역 통계 계산, 시계열 작업의 예를 보려면 Dynamic World 소개 튜토리얼 시리즈를 참고하세요.
Dynamic World 클래스 추정치는 작은 이동 창의 공간 컨텍스트를 사용하여 단일 이미지에서 파생되므로 농작물과 같이 시간 경과에 따른 피복으로 부분적으로 정의된 예측 토지 피복의 상위 1개 '확률'은 명확한 구별 기능이 없는 경우 비교적 낮을 수 있습니다. 건조한 기후, 모래, 햇빛 반사 등이 있는 고반사 표면에서도 이 현상이 나타날 수 있습니다.
Dynamic World 클래스에 속한다고 확신할 수 있는 픽셀만 선택하려면 상위 1개 예측의 추정된 '확률'을 임계값으로 지정하여 Dynamic World 출력을 마스크하는 것이 좋습니다.
대역
대역
픽셀 크기: 10m (모든 밴드)
| 이름 | 최소 | 최대 | 픽셀 크기 | 설명 |
|---|---|---|---|---|
water |
0 | 1 | 10미터 | 물에 의한 완전한 덮음의 예상 확률 |
trees |
0 | 1 | 10미터 | 나무로 완전히 덮일 예상 확률 |
grass |
0 | 1 | 10미터 | 잔디로 완전히 덮일 예상 확률 |
flooded_vegetation |
0 | 1 | 10미터 | 홍수로 잠긴 식물에 의한 완전한 피복의 예상 확률 |
crops |
0 | 1 | 10미터 | 작물에 의한 완전한 피복의 예상 확률 |
shrub_and_scrub |
0 | 1 | 10미터 | 관목 및 수풀의 완전한 피복 확률 추정치 |
built |
0 | 1 | 10미터 | 빌드로 완전한 커버리지를 달성할 예상 확률 |
bare |
0 | 1 | 10미터 | 베어 메탈로 완전한 커버리지를 달성할 예상 확률 |
snow_and_ice |
0 | 1 | 10미터 | 눈과 얼음으로 완전히 덮일 가능성 |
label |
0 | 8 | 10미터 | 예상 확률이 가장 높은 대역의 색인 |
라벨 클래스 표
| 값 | 색상 | 설명 |
|---|---|---|
| 0 | #419bdf | 물 |
| 1 | #397d49 | 나무 |
| 2 | #88b053 | 잔디 |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | 작물 |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | 빌드 |
| 7 | #a59b8f | bare |
| 8 | #b39fe1 | snow_and_ice |
이미지 속성
이미지 속성
| 이름 | 유형 | 설명 |
|---|---|---|
| dynamicworld_algorithm_version | 문자열 | 이미지를 생성하는 데 사용된 Dynamic World 모델과 추론 프로세스를 고유하게 식별하는 버전 문자열입니다. |
| qa_algorithm_version | 문자열 | 이미지를 생성하는 데 사용된 클라우드 마스킹 프로세스를 고유하게 식별하는 버전 문자열입니다. |
이용약관
이용약관
이 데이터 세트는 CC-BY 4.0에 따라 라이선스가 부여되며 다음과 같은 저작자 표시가 필요합니다. '이 데이터 세트는 Google이 National Geographic Society 및 World Resources Institute와 협력하여 Dynamic World 프로젝트를 위해 제작했습니다.'
수정된 Copernicus Sentinel 데이터[2015년~현재]가 포함되어 있습니다. Sentinel 데이터 법적 고지를 참고하세요.
인용
Brown, C.F., Brumby, S.P., Guzder-Williams, B. 외. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
DOI
Earth Engine으로 탐색
코드 편집기(JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab(Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m