- ความพร้อมใช้งานของชุดข้อมูล
- 2012-01-01T00:00:00Z–2017-01-01T00:00:00Z
- ผู้ผลิตชุดข้อมูล
- Global Fishing Watch
- ความถี่การบันทึก
- 1 วัน
- แท็ก
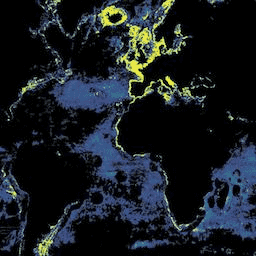
คำอธิบาย
การปรากฏตัวของเรือประมง ซึ่งวัดเป็นชั่วโมงต่อตารางกิโลเมตร ชิ้นงานแต่ละรายการคือการปรากฏตัวของเรือสำหรับรัฐที่จดทะเบียนและวันหนึ่งๆ โดยมี 1 ย่านความถี่สำหรับการปรากฏตัวของอุปกรณ์แต่ละประเภท
ดูสคริปต์ Earth Engine ตัวอย่าง และดูเว็บไซต์หลักของ GFW เพื่อดูข้อมูลโปรแกรม แผนที่การแสดงภาพแบบอินเทอร์แอกทีฟเต็มรูปแบบ และผลกระทบ
ย่านความถี่
ย่านความถี่
ขนาดพิกเซล: 1113.2 เมตร (ทุกย่านความถี่)
| ชื่อ | หน่วย | ขนาดพิกเซล | คำอธิบาย |
|---|---|---|---|
drifting_longlines |
ชม./ตร.กม. | 1113.2 เมตร | ชั่วโมงต่อตารางกิโลเมตรของการปรากฏตัวของเรือประมงที่มีอวนลาก |
fixed_gear |
ชม./ตร.กม. | 1113.2 เมตร | ชั่วโมงต่อตารางกิโลเมตรของการปรากฏตัวของเรือประมงที่มีเครื่องมือประมงแบบคงที่ |
other_fishing |
ชม./ตร.กม. | 1113.2 เมตร | ชั่วโมงต่อตารางกิโลเมตรของการปรากฏตัวของเรือประมงที่มีเครื่องมือประมงประเภทอื่นๆ |
purse_seines |
ชม./ตร.กม. | 1113.2 เมตร | ชั่วโมงต่อตารางกิโลเมตรของการปรากฏตัวของเรือประมงที่มีอวนล้อมจับ |
squid_jigger |
ชม./ตร.กม. | 1113.2 เมตร | ชั่วโมงต่อตารางกิโลเมตรของการปรากฏตัวของเรือประมงที่มีเครื่องมือจับปลาหมึก |
trawlers |
ชม./ตร.กม. | 1113.2 เมตร | ชั่วโมงต่อตารางกิโลเมตรของการปรากฏตัวของเรือประมงที่มีเรืออวนลาก |
พร็อพเพอร์ตี้รูปภาพ
พร็อพเพอร์ตี้รูปภาพ
| ชื่อ | ประเภท | คำอธิบาย |
|---|---|---|
| country | STRING | รหัสประเทศ 3 ตัวอักษรตามมาตรฐาน ISO ของรัฐที่จดทะเบียนเรือ หากต้องการใช้กับทุกประเทศ ให้ใช้ "WLD" |
ข้อกำหนดในการใช้งาน
ข้อกำหนดในการใช้งาน
ผลงานนี้ได้รับอนุญาตภายใต้ Creative Commons Attribution-ShareAlike 4.0 International License (CC-BY-SA)
การอ้างอิง
Global Fishing Watch, "Tracking the Global Footprint of Fisheries." Science 361.6378 (2018).
สำรวจด้วย Earth Engine
ตัวแก้ไขโค้ด (JavaScript)
var dataset = ee.ImageCollection('GFW/GFF/V1/vessel_hours') .filter(ee.Filter.date('2016-12-01', '2017-01-01')); var trawlers = dataset.select('trawlers'); var trawlersVis = { min: 0.0, max: 5.0, }; Map.setCenter(130.61, 34.287, 8); Map.addLayer(trawlers.max(), trawlersVis, 'Trawlers');