- Veri Kümesi Kullanılabilirliği
- 2018-09-08T21:19:29Z–2026-07-15T10:50:12Z
- Veri Kümesi Üreticisi
- Avrupa Birliği/ESA/Copernicus
- Yeniden Ziyaret Aralığı
- 2 gün
- Etiketler
Açıklama
OFFL/L3_O3
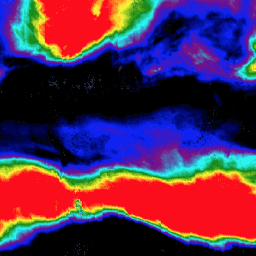
Bu veri kümesi, toplam sütun ozon konsantrasyonlarının yüksek çözünürlüklü çevrimdışı görüntülerini sağlar. Troposferik sütun verileri için COPERNICUS/S5P/OFFL/L3_O3_TCL sayfasına da bakın.
Stratosferdeki ozon tabakası, biyosferi tehlikeli güneş ultraviyole radyasyonundan korur. Troposferde etkili bir temizlik maddesi olarak işlev görür ancak yüksek konsantrasyonda insanların, hayvanların ve bitki örtüsünün sağlığı için zararlı hale gelir. Ozon, devam eden iklim değişikliğine katkıda bulunan önemli bir sera gazıdır. 1980'lerde Antarktika'daki ozon deliğinin keşfedilmesinden ve klor içeren ozon tabakasını incelten maddelerin üretimini düzenleyen Montreal Protokolü'nün yürürlüğe girmesinden bu yana ozon, yerden ve uzaydan düzenli olarak izlenmektedir.
Bu ürün için toplam ozonu sağlayan iki algoritma vardır: Neredeyse gerçek zamanlı ürünler için GDP, çevrimdışı ürünler için GODFIT. GDP şu anda GOME, SCIAMACHY ve GOME-2'den operasyonel toplam ozon ürünleri oluşturmak için kullanılırken GODFIT, ESA CCI ve Copernicus C3S projelerinde kullanılmaktadır. Daha fazla bilgi. Ürün kullanıcı kılavuzu
OFFL L3 Ürünü
OFFL L3 ürünlerimizi oluşturmak için ürünün sınırlayıcı kutusundaki alanları aşağıdaki gibi bir komutla buluruz:
harpconvert --format hdf5 --hdf5-compression 9
-a 'O3_column_number_density_validity>50;derive(datetime_stop {time})'
S5P_OFFL_L2__O3_____20181005T225147_20181006T003317_05073_01_010102_20181012T001415.nc
grid_info.h5
Ardından, tüm verileri tek bir büyük mozaikte birleştiririz (farklı zamanlarda farklı değerlere sahip olabilecek pikseller için değerleri alan ortalaması olarak alırız). Mozaikten, ortorektifiye edilmiş raster verileri içeren bir dizi bölüm oluştururuz.
qa değeri, harpconvert çalıştırılmadan önce aşağıdaki ölçütlerin tümünü karşılayacak şekilde ayarlanır:
- ozone_total_vertical_column in [0, 0.45]
- ozone_effective_temperature in [180, 260]
- ring_scale_factor in [0, 0.15]
- effective_albedo in [-0.5, 1.5]
Bir bölüm için örnek harpconvert çağrısı:
harpconvert --format hdf5 --hdf5-compression 9
-a 'O3_column_number_density_validity>50;derive(datetime_stop {time});
bin_spatial(2001, 50.000000, 0.01, 2001, -120.000000, 0.01);
keep(O3_column_number_density,O3_effective_temperature,cloud_fraction,
sensor_altitude,sensor_azimuth_angle, sensor_zenith_angle,
solar_azimuth_angle,solar_zenith_angle)'
S5P_OFFL_L2__O3_____20181005T225147_20181006T003317_05073_01_010102_20181012T001415.nc
output.h5
Sentinel-5 Precursor
Sentinel-5 Precursor, 13 Ekim 2017'de Avrupa Uzay Ajansı tarafından hava kirliliğini izlemek için fırlatılan bir uydudur. Yerleşik sensör, sıklıkla Tropomi (TROPOsferik İzleme Cihazı) olarak adlandırılır.
CH4 hariç tüm S5P veri kümelerinin iki sürümü vardır: Neredeyse Gerçek Zamanlı (NRTI) ve Çevrimdışı (OFFL). CH4 yalnızca OFFL olarak kullanılabilir. NRTI öğeleri, OFFL öğelerine göre daha küçük bir alanı kapsar ancak edinildikten sonra daha hızlı görünür. OFFL öğeleri tek bir yörüngeden alınan verileri içerir (Dünyanın yarısı karanlık olduğundan yalnızca tek bir yarım küreye ait veriler bulunur).
Verilerdeki gürültü nedeniyle, negatif dikey sütun değerleri özellikle temiz bölgelerde veya düşük SO2 emisyonlarında sıklıkla gözlemlenir. Aykırı değerler (ör. -0, 001 mol/m^2'den düşük dikey sütunlar) hariç bu değerlerin filtrelenmemesi önerilir.
Orijinal Sentinel 5P Seviye 2 (L2) verileri enlem/boylama göre değil, zamana göre gruplandırılır. Verilerin Earth Engine'e aktarılabilmesi için her Sentinel 5P L2 ürünü, yörünge başına tek bir ızgara olacak şekilde L3'e dönüştürülür (yani ürünler arasında toplama işlemi yapılmaz).
Antimeridyeni kapsayan kaynak ürünler, _1 ve _2 sonekleriyle iki Earth Engine öğesi olarak alınır.
L3'e dönüştürme işlemi, bin_spatial işlemi kullanılarak harpconvert aracıyla yapılır. Kaynak veriler, kalite kontrol değerleri şu değerlerden düşük olan pikselleri kaldırmak için filtrelenir:
- AER_AI için%80
- NO2'nin troposferik_NO2_column_number_density bandı için %75
- O3 ve SO2 dışındaki tüm veri kümeleri için %50
O3_TCL ürünü doğrudan (harpconvert çalıştırılmadan) alınır.
Bantlar
Bantlar
Piksel boyutu: 1.113,2 metre (tüm bantlar)
| Ad | Birimler | Min. | Maks. | Piksel Boyutu | Açıklama |
|---|---|---|---|---|---|
O3_column_number_density |
mol/m^2 | 0,025* | 0,3048* | 1.113,2 metre | Yüzey ile atmosferin üst kısmı arasındaki toplam atmosferik O3 sütunu, GODfit algoritması ile hesaplanır. |
O3_effective_temperature |
K | 19,92* | 428,11* | 1.113,2 metre | Ozon kesitinin etkili sıcaklığı |
cloud_fraction |
Kesir | 0* | 1* | 1.113,2 metre | Etkili bulut oranı. Sentinel 5P L2 Giriş/Çıkış Veri Tanımı Spesifikasyonu, s.220'ye bakın. |
sensor_azimuth_angle |
drc | -180* | 180* | 1.113,2 metre | Uydunun yerde piksel konumundaki azimut açısı (WGS84); Kuzeyin doğusunda ölçülen açı. |
sensor_zenith_angle |
derece | 0,098* | 66,57* | 1.113,2 metre | Uydunun yerde piksel konumundaki zenit açısı (WGS84); dikeyden uzaklaşarak ölçülen açı. |
solar_azimuth_angle |
derece | -180* | 180* | 1.113,2 metre | Güneşin yerde piksel konumundaki azimut açısı (WGS84); Kuzeyin doğusunda ölçülen açı. |
solar_zenith_angle |
drc | 8* | 102* | 1.113,2 metre | Uydunun yerde piksel konumundaki zenit açısı (WGS84); dikeyden uzaklaşarak ölçülen açı. |
Resim Özellikleri
Görüntü Özellikleri
| Ad | Tür | Açıklama |
|---|---|---|
| ALGORITHM_VERSION | DİZE | L2 işlemede kullanılan algoritma sürümü. Farklı ürünlerin farklı yayın planlarına uyum sağlamak için işlemci (çerçeve) sürümünden ayrıdır. |
| BUILD_DATE | DİZE | L2 işleme gerçekleştirmek için kullanılan yazılımın oluşturulduğu 1 Ocak 1970 tarihinden itibaren geçen milisaniye sayısı olarak ifade edilir. |
| HARP_VERSION | INT | L2 verilerini L3 ürününe bölmek için kullanılan HARP aracının sürümü. |
| KURUM | DİZE | L1'den L2'ye veri işlemenin yapıldığı kurum. |
| L3_PROCESSING_TIME | INT | Google'ın, harpconvert kullanarak L2 verilerini L3'e işlediği, 1 Ocak 1970'ten itibaren geçen milisaniye sayısı olarak ifade edilen tarih. |
| LAT_MAX | ÇİFT | Öğenin maksimum enlemi (derece). |
| LAT_MIN | ÇİFT | Öğenin minimum enlemi (derece). |
| LON_MAX | ÇİFT | Öğenin maksimum boylamı (derece). |
| LON_MIN | ÇİFT | Öğenin minimum boylamı (derece). |
| ORBIT | INT | Veriler elde edildiğinde uydunun yörünge numarası. |
| PLATFORM | DİZE | Verileri elde eden platformun adı. |
| PROCESSING_STATUS | DİZE | Ürünün küresel düzeydeki işleme durumu. Bu durum, temel olarak yardımcı giriş verilerinin kullanılabilirliğine bağlıdır. Olası değerler "Nominal" ve "Düşük"tür. |
| PROCESSOR_VERSION | DİZE | L2 işleme için kullanılan yazılımın "major.minor.patch" biçiminde bir dize olarak sürümü. |
| PRODUCT_ID | DİZE | Bu öğeyi oluşturmak için kullanılan L2 ürününün kimliği. |
| PRODUCT_QUALITY | DİZE | Ürün kalitesinin düşüp düşmediğini belirten gösterge. İzin verilen değerler "Düşük" ve "Nominal"dir. |
| SENSOR | DİZE | Verileri elde eden sensörün adı. |
| SPATIAL_RESOLUTION | DİZE | Ayakucu noktasındaki uzamsal çözünürlük. Çoğu ürün için bu |
| TIME_REFERENCE_DAYS_SINCE_1950 | INT | 1 Ocak 1950'den verilerin elde edildiği tarihe kadar geçen gün sayısı. |
| TIME_REFERENCE_JULIAN_DAY | ÇİFT | Verilerin elde edildiği Julian günü numarası. |
| TRACKING_ID | DİZE | L2 ürün dosyası için UUID. |
| STATUS_MET_2D | Dize | Bu veri kümesi, L2 işleme sırasında dinamik yardımcı hava durumu verilerini kullanır. Bu alan, ECMWF dinamik yardımcı verileri varsa "Nominal", yoksa "Fallback" değerine sahiptir. |
Kullanım Şartları
Kullanım Şartları
Sentinel verilerinin kullanımı Copernicus Sentinel Veri Hüküm ve Koşulları'na tabidir.
Earth Engine ile Keşif
Kod Düzenleyici (JavaScript)
var collection = ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_O3') .select('O3_column_number_density') .filterDate('2019-06-01', '2019-06-05'); var band_viz = { min: 0.12, max: 0.15, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P O3'); Map.setCenter(0.0, 0.0, 2);