- ความพร้อมใช้งานของชุดข้อมูล
- 2018-07-04T11:34:21Z–2026-05-15T16:36:45Z
- ผู้ผลิตชุดข้อมูล
- สหภาพยุโรป/ESA/Copernicus
- ช่วงการเก็บข้อมูล
- 2 วัน
- แท็ก
คำอธิบาย
OFFL/L3_CLOUD
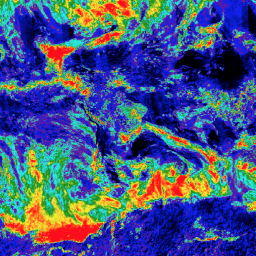
ชุดข้อมูลนี้แสดงภาพความละเอียดสูงแบบออฟไลน์ของพารามิเตอร์เมฆ
การดึงข้อมูลคุณสมบัติของเมฆจาก TROPOMI/S5P อิงตามอัลกอริทึม OCRA และ ROCINN ที่ใช้งานอยู่ในผลิตภัณฑ์ GOME และ GOME-2 OCRA จะดึงข้อมูลการกระจายตัวของเมฆ โดยใช้การวัดในช่วงคลื่นรังสีอัลตราไวโอเลตและแสงขาว (UV/VIS) ส่วน ROCINN จะดึงข้อมูลความสูงของเมฆ (ความดัน) และความหนาเชิงแสงของเมฆ (อัลบีโด) โดยใช้การวัดในและรอบๆ ช่วงคลื่นออกซิเจน A-band ที่ 760 นาโนเมตร ระบบจะใช้อัลกอริทึมเวอร์ชัน 3.0 ซึ่งอิงตามการจัดการเมฆที่สมจริงมากขึ้น โดยถือว่าเมฆเป็นชั้นของอนุภาคที่กระเจิงแสงซึ่งมองเห็นได้ นอกจากนี้ ระบบยังมีพารามิเตอร์ของเมฆสำหรับโมเดลเมฆที่ถือว่าเมฆเป็นขอบเขตการสะท้อนของ Lambertian ด้วย ข้อมูลเพิ่มเติม
ผลิตภัณฑ์ OFFL L3
ในการสร้างผลิตภัณฑ์ OFFL L3 เราจะค้นหาพื้นที่ภายในกรอบล้อมรอบของผลิตภัณฑ์ที่มีข้อมูลโดยใช้คำสั่งต่อไปนี้
harpconvert --format hdf5 --hdf5-compression 9
-a 'cloud_fraction>50;derive(datetime_stop {time})'
S5P_OFFL_L2__CLOUD__20180705T095218_20180705T113348_03760_01_010000_20180712T082510.nc
grid_info.h5
จากนั้นเราจะผสานข้อมูลทั้งหมดเป็นภาพโมเสกขนาดใหญ่ (ค่าเฉลี่ยของพื้นที่สำหรับ พิกเซลที่อาจมีค่าแตกต่างกันในเวลาต่างๆ) จากภาพโมเสก เราจะสร้างชุดไทล์ที่ประกอบด้วยข้อมูลแรสเตอร์ที่ผ่านการปรับแก้เชิงภูมิศาสตร์
ตัวอย่างการเรียกใช้ harpconvert สำหรับไทล์ 1 รายการ:
harpconvert --format hdf5 --hdf5-compression 9
-a 'cloud_fraction>50;derive(datetime_stop {time});
bin_spatial(2001, 50.000000, 0.01, 2001, -120.000000, 0.01);
keep(cloud_fraction,cloud_top_pressure,cloud_top_height,
cloud_base_pressure,cloud_base_height,cloud_optical_depth,surface_albedo,
sensor_azimuth_angle,sensor_zenith_angle,solar_azimuth_angle,
solar_zenith_angle)'
S5P_OFFL_L2__CLOUD__20180705T095218_20180705T113348_03760_01_010000_20180712T082510.nc
output.h5
Sentinel-5 Precursor
Sentinel-5 Precursor เป็นดาวเทียมที่ปล่อยสู่ห้วงอวกาศเมื่อวันที่ 13 ตุลาคม 2017 โดยองค์การอวกาศยุโรปเพื่อตรวจสอบมลพิษทางอากาศ เซ็นเซอร์บนดาวเทียม มักเรียกว่า Tropomi (TROPOspheric Monitoring Instrument)
ชุดข้อมูล S5P ทั้งหมด ยกเว้น CH4 มี 2 เวอร์ชัน ได้แก่ ใกล้เคียงเรียลไทม์ (NRTI) และออฟไลน์ (OFFL) CH4 พร้อมให้บริการในรูปแบบ OFFL เท่านั้น ชุดข้อมูล NRTI ครอบคลุมพื้นที่น้อยกว่าชุดข้อมูล OFFL แต่ปรากฏขึ้นเร็วกว่าหลังจากได้มา ชุดข้อมูล OFFL ประกอบด้วยข้อมูลจากวงโคจรเดียว ซึ่งเนื่องจากโลกมีด้านหนึ่งอยู่ในความมืด จึงทำให้มีข้อมูลครอบคลุมเพียงซีกโลกเดียว
เนื่องจากมีสัญญาณรบกวนในข้อมูล ค่าคอลัมน์แนวตั้งที่เป็นลบจึงมักสังเกตได้โดยเฉพาะในภูมิภาคที่สะอาดหรือมีการปล่อย SO2 ต่ำ เราขอแนะนำว่าไม่ควรกรองค่าเหล่านี้ ยกเว้นข้อมูลผิดปกติทางสถิติ นั่นคือ คอลัมน์แนวตั้งที่ต่ำกว่า -0.001 mol/m^2
ข้อมูล Sentinel-5P ระดับ 2 (L2) ต้นฉบับจะจัดกลุ่มตามเวลา ไม่ได้จัดกลุ่มตามพิกัดละติจูด/ลองจิจูด เราจึงแปลงผลิตภัณฑ์ Sentinel 5P L2 แต่ละรายการเป็น L3 เพื่อให้สามารถนำเข้าข้อมูลไปยัง Earth Engine ได้ โดยจะเก็บตารางกริดเดียวต่อวงโคจร (กล่าวคือ ไม่มีการรวมข้อมูลข้ามผลิตภัณฑ์)
ระบบจะนำเข้าผลิตภัณฑ์ต้นทางที่ครอบคลุมเส้นแอนติมิริเดียนเป็นชุดข้อมูล Earth Engine สองชุด โดยมีคำต่อท้าย _1 และ _2
harpconvert
จะแปลงข้อมูลเป็น L3 โดยใช้การดำเนินการ bin_spatial ระบบจะกรองข้อมูลต้นทางเพื่อนำพิกเซลที่มีค่า QA น้อยกว่าค่าต่อไปนี้ออก
- 80% สำหรับ AER_AI
- 75% สำหรับแถบ tropospheric_NO2_column_number_density
- 50% สำหรับชุดข้อมูลอื่นๆ ทั้งหมดยกเว้น O3 และ SO2
ระบบจะนำเข้าผลิตภัณฑ์ O3_TCL โดยตรง (โดยไม่ต้องเรียกใช้ harpconvert)
ย่านความถี่
ย่านความถี่
ขนาดพิกเซล: 1113.2 เมตร (ทุกแถบ)
| ชื่อ | หน่วย | ต่ำสุด | สูงสุด | ขนาดพิกเซล | คำอธิบาย |
|---|---|---|---|---|---|
cloud_fraction |
เศษส่วน | 0* | 1* | 1,113.2 เมตร | การกระจายของเมฆโดยการคำนวณค่ารังสี |
cloud_top_pressure |
Pa | 12110* | 101299* | 1,113.2 เมตร | ความกดอากาศที่ระดับยอดเมฆโดยการคำนวณ |
cloud_top_height |
ม. | 9* | 15455* | 1,113.2 เมตร | ระดับความสูงที่วัดได้ของยอดเมฆ |
cloud_base_pressure |
Pa | 14170* | 101299* | 1,113.2 เมตร | ความกดอากาศที่ฐานเมฆ |
cloud_base_height |
ม. | 9* | 14540* | 1,113.2 เมตร | ความสูงของฐานเมฆ |
cloud_optical_depth |
1* | 250* | 1,113.2 เมตร | ความหนาเชิงแสงของเมฆโดยการคำนวณ |
|
surface_albedo |
3.95845e-11* | 1* | 1,113.2 เมตร | สัดส่วนการสะท้อนรังสีของพื้นผิว |
|
sensor_azimuth_angle |
องศา | -180* | 180* | 1,113.2 เมตร | มุมแอซิมัทของดาวเทียมที่ตำแหน่งพิกเซลบนพื้นโลก (WGS84) โดยเป็นมุมที่วัดจากทิศเหนือไปทางทิศตะวันออก |
sensor_zenith_angle |
องศา | 0.09* | 66.44* | 1,113.2 เมตร | มุมเซนิตของดาวเทียมที่ตำแหน่งพิกเซลบนพื้นโลก (WGS84) โดยเป็นมุมที่วัดออกจากแนวดิ่ง |
solar_azimuth_angle |
องศา | -180* | 180* | 1,113.2 เมตร | มุมแอซิมัทของดวงอาทิตย์ที่ตำแหน่งพิกเซลบนพื้นโลก (WGS84) โดยเป็นมุมที่วัดจากทิศเหนือไปทางทิศตะวันออก |
solar_zenith_angle |
องศา | 8* | 80* | 1,113.2 เมตร | มุมเซนิตของดาวเทียมที่ตำแหน่งพิกเซลบนพื้นโลก (WGS84) โดยเป็นมุมที่วัดออกจากแนวดิ่ง |
พร็อพเพอร์ตี้รูปภาพ
พร็อพเพอร์ตี้รูปภาพ
| ชื่อ | ประเภท | คำอธิบาย |
|---|---|---|
| ALGORITHM_VERSION | STRING | เวอร์ชันอัลกอริทึมที่ใช้ในการประมวลผล L2 ซึ่งแยกจากเวอร์ชันของหน่วยประมวลผล (เฟรมเวิร์ก) เพื่อรองรับกำหนดการเผยแพร่ที่แตกต่างกันของผลิตภัณฑ์ต่างๆ |
| BUILD_DATE | STRING | วันที่ที่แสดงเป็นมิลลิวินาทีตั้งแต่วันที่ 1 ม.ค. 1970 เมื่อสร้างซอฟต์แวร์ที่ใช้ในการประมวลผล L2 |
| HARP_VERSION | INT | เวอร์ชันของเครื่องมือ HARP ที่ใช้ในการจัดตารางข้อมูล L2 เป็นผลิตภัณฑ์ L3 |
| INSTITUTION | STRING | สถาบันที่ทำการประมวลผลข้อมูลจาก L1 เป็น L2 |
| L3_PROCESSING_TIME | INT | วันที่ที่แสดงเป็นมิลลิวินาทีนับตั้งแต่วันที่ 1 ม.ค. 1970 เมื่อ Google ประมวลผลข้อมูล L2 เป็น L3 โดยใช้ harpconvert |
| LAT_MAX | DOUBLE | ละติจูดสูงสุดของชุดข้อมูล (องศา) |
| LAT_MIN | DOUBLE | ละติจูดต่ำสุดของชุดข้อมูล (องศา) |
| LON_MAX | DOUBLE | ลองจิจูดสูงสุดของชุดข้อมูล (องศา) |
| LON_MIN | DOUBLE | ลองจิจูดต่ำสุดของชุดข้อมูล (องศา) |
| ORBIT | INT | หมายเลขออร์บิตของดาวเทียมเมื่อเก็บข้อมูล |
| PLATFORM | STRING | ชื่อแพลตฟอร์มที่เก็บข้อมูล |
| PROCESSING_STATUS | STRING | สถานะการประมวลผลของผลิตภัณฑ์ในระดับโลก โดยอิงตาม ความพร้อมใช้งานของข้อมูลอินพุตเสริมเป็นหลัก ค่าที่เป็นไปได้คือ "Nominal" และ "Degraded" |
| PROCESSOR_VERSION | STRING | เวอร์ชันของซอฟต์แวร์ที่ใช้ในการประมวลผล L2 เป็นสตริงในรูปแบบ "major.minor.patch" |
| PRODUCT_ID | STRING | รหัสของผลิตภัณฑ์ L2 ที่ใช้สร้างชุดข้อมูลนี้ |
| PRODUCT_QUALITY | STRING | ตัวบ่งชี้ที่ระบุว่าคุณภาพของผลิตภัณฑ์ลดลงหรือไม่ ค่าที่อนุญาตคือ "Degraded" และ "Nominal" |
| SENSOR | STRING | ชื่อเซ็นเซอร์ที่เก็บข้อมูล |
| SPATIAL_RESOLUTION | STRING | ความละเอียดเชิงพื้นที่ในจุดที่ต่ำที่สุด สำหรับผลิตภัณฑ์ส่วนใหญ่คือ |
| TIME_REFERENCE_DAYS_SINCE_1950 | INT | จำนวนวันตั้งแต่วันที่ 1 ม.ค. 1950 จนถึงวันที่เก็บข้อมูล |
| TIME_REFERENCE_JULIAN_DAY | DOUBLE | หมายเลขวันจูเลียนเมื่อเก็บข้อมูล |
| TRACKING_ID | STRING | UUID สำหรับไฟล์ผลิตภัณฑ์ L2 |
| CLOUD_MODE | STRING | บอกถึงโมเดลที่ใช้สร้างชุดข้อมูลนี้ ซึ่งได้แก่ โมเดล CAL (เมฆเป็นชั้น) หรือโมเดล CRB (เมฆเป็นขอบเขตการสะท้อน) ค่าที่ใช้ได้ของคุณสมบัตินี้คือ "cal" หรือ "crb" ตามลำดับ โดยค่าเริ่มต้นคือ "cal" |
| STATUS_MET_2D | STRING | ชุดข้อมูลนี้ใช้ข้อมูลเสริมแบบไดนามิกบางส่วนจากศูนย์พยากรณ์อากาศระยะปานกลางแห่งยุโรป หากใช้ข้อมูล ECMWF ฟิลด์นี้จะมีค่าเป็น "Nominal" หากไม่ได้ใช้ข้อมูล ECMWF ระบบจะใช้โซลูชันสำรอง และช่องนี้จะมีค่าเป็น "Fallback" |
ข้อกำหนดในการใช้งาน
ข้อกำหนดในการใช้งาน
การใช้ข้อมูล Sentinel อยู่ในบังคับของข้อกำหนดและเงื่อนไขของการใช้ข้อมูล Copernicus Sentinel
สำรวจด้วย Earth Engine
ตัวแก้ไขโค้ด (JavaScript)
var collection = ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_CLOUD') .select('cloud_fraction') .filterDate('2019-06-01', '2019-06-02'); var band_viz = { min: 0, max: 0.95, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P Cloud'); Map.setCenter(-58.14, -10.47, 2);