- זמינות קבוצת הנתונים
- 2018-07-04T11:34:21Z–2026-07-12T16:51:49Z
- מפיק מערך הנתונים
- האיחוד האירופי/סוכנות החלל האירופית/קופרניקוס
- מרווח הזמן בין כל אחזור של נתונים עדכניים
- יומיים
- תגים
תיאור
OFFL/L3_CLOUD
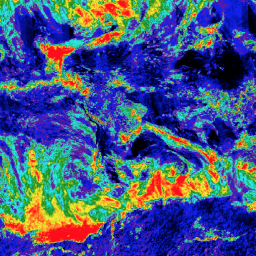
קבוצת הנתונים הזו מספקת תמונות אופליין ברזולוציה גבוהה של פרמטרים של עננים.
האחזור של מאפייני הענן של TROPOMI/S5P מבוסס על האלגוריתמים OCRA ו-ROCINN שנמצאים כרגע בשימוש במוצרי GOME ו-GOME-2 הפעילים. OCRA מאחזר את חלקיק הענן באמצעות מדידות באזורים הספקטרליים של UV/VIS, ו-ROCNN מאחזר את גובה הענן (לחץ) ואת העובי האופטי (אלבדו) באמצעות מדידות בתוך ובסביבת רצועת החמצן A ב-760 ננומטר. נעשה שימוש בגרסה 3.0 של האלגוריתמים, שמתייחסת לעננים בצורה מציאותית יותר כשכבות אחידות אופטית של חלקיקים שמפזרים אור. בנוסף, הפרמטרים של הענן מסופקים גם עבור מודל ענן שמניח שהענן הוא גבול רפלקטיבי של למברט. מידע נוסף.
מוצר OFFL L3
כדי ליצור את מוצרי ה-OFFL L3 שלנו, אנחנו מוצאים את האזורים שיש בהם נתונים בתוך התיבה התוחמת (bounding box) של המוצר עם פקודה כזו:
harpconvert --format hdf5 --hdf5-compression 9
-a 'cloud_fraction>50;derive(datetime_stop {time})'
S5P_OFFL_L2__CLOUD__20180705T095218_20180705T113348_03760_01_010000_20180712T082510.nc
grid_info.h5
לאחר מכן, אנחנו ממזגים את כל הנתונים לפסיפס אחד גדול (ערך ממוצע באזור נתון של פיקסלים עם ערכים שונים בזמנים שונים). מהפסיפס אנחנו יוצרים קבוצה של משבצות שמכילות נתוני רסטר שעברו תיקון גיאומטרי (orthorectified).
דוגמה להפעלה של harpconvert על משבצת אחת:
harpconvert --format hdf5 --hdf5-compression 9
-a 'cloud_fraction>50;derive(datetime_stop {time});
bin_spatial(2001, 50.000000, 0.01, 2001, -120.000000, 0.01);
keep(cloud_fraction,cloud_top_pressure,cloud_top_height,
cloud_base_pressure,cloud_base_height,cloud_optical_depth,surface_albedo,
sensor_azimuth_angle,sensor_zenith_angle,solar_azimuth_angle,
solar_zenith_angle)'
S5P_OFFL_L2__CLOUD__20180705T095218_20180705T113348_03760_01_010000_20180712T082510.nc
output.h5
Sentinel-5 Precursor
Sentinel-5 Precursor הוא לוויין ששיגרה סוכנות החלל האירופית ב-13 באוקטובר 2017 כדי לעקוב אחרי זיהום האוויר. החיישן שנמצא בלוויין נקרא בדרך כלל Tropomi (TROPOspheric Monitoring Instrument - מכשיר מעקב טרופוספירי).
לכל קבוצות הנתונים של S5P, מלבד CH4, יש שתי גרסאות: כמעט בזמן אמת (NRTI) ואופליין (OFFL). הקבוצה CH4 זמינה רק בגרסת OFFL. נכסי ה-NRTI מכסים שטח קטן יותר מנכסי ה-OFFL, אבל מופיעים מהר יותר אחרי איסוף הנתונים. נכסי OFFL מכילים נתונים ממסלול אחד (שמכיל נתונים רק ממחצית אחת של כדור הארץ, כי המחצית השנייה חשוכה).
בגלל רעש בנתונים, לעיתים קרובות רואים ערכים שליליים של חתכים אנכיים, במיוחד מעל אזורים נקיים או במקרים של פליטות SO2 נמוכות. מומלץ לא לסנן את הערכים האלה, מלבד חריגים שחשודים כטעות, כלומר חתכים אנכיים שנמוכים מ-0.001 mol/m^2.
הנתונים המקוריים של Sentinel 5P ברמה 2 (L2) מקובצים לפי זמן, ולא לפי קו הרוחב/קו האורך. כדי שאפשר יהיה להטמיע את הנתונים ב-Earth Engine, כל מוצר Sentinel 5P ברמה 2 מומר לרמה 3, תוך שמירה על רשת אחת לכל מסלול (כלומר, אין צבירת נתונים בין מוצרים).
מוצרי מקור שנמצאים משני צידי האנטימרידיאן מוטמעים כשני נכסים של Earth Engine, עם הסיומת _1 והסיומת _2.
ההמרה ל-L3 מתבצעת דרך הכלי harpconvert באמצעות הפעולה bin_spatial. נתוני המקור מסוננים כדי להסיר פיקסלים עם ערכי בקרת איכות שקטנים מ:
- 80% ל-AER_AI
- 75% לרצועה tropospheric_NO2_column_number_density של NO2
- 50% לכל קבוצות הנתונים האחרות מלבד O3 ו-SO2
המוצר O3_TCL מוטמע ישירות (בלי להריץ את harpconvert).
תחום תדרים
תחום תדרים
גודל הפיקסל: 1,113.2 מטרים (כל הפסים)
| שם | יחידות | מינימום | מקסימום | גודל הפיקסל | תיאור |
|---|---|---|---|---|---|
cloud_fraction |
שיעור | 0* | 1* | 11,132 מטרים | שיעור העננים הרדיומטרי בפועל שאוחזר |
cloud_top_pressure |
Pa | 12110* | 101299* | 11,132 מטרים | לחץ אטמוספרי ברמה של החלק העליון של הענן שאוחזר |
cloud_top_height |
מטרים | 9* | 15455* | 11,132 מטרים | גובה החלק העליון של הענן שאוחזר |
cloud_base_pressure |
Pa | 14170* | 101299* | 11,132 מטרים | לחץ בבסיס הענן |
cloud_base_height |
מטרים | 9* | 14540* | 11,132 מטרים | גובה בסיס הענן |
cloud_optical_depth |
1* | 250* | 11,132 מטרים | עומק אופטי של הענן שאוחזר |
|
surface_albedo |
3.95845e-11* | 1* | 11,132 מטרים | עוצמת החזרת האור היחסית של פני השטח |
|
sensor_azimuth_angle |
מעלות | -180* | 180* | 11,132 מטרים | זווית האזימוט של הלוויין במיקום הפיקסל על הקרקע (WGS84). הזווית נמדדת מזרחה מהצפון. |
sensor_zenith_angle |
מעלות | 0.09* | 66.44* | 11,132 מטרים | זווית האזימוט של הלוויין במיקום הפיקסל על הקרקע (WGS84). הזווית נמדדת מהאנך. |
solar_azimuth_angle |
מעלות | -180* | 180* | 11,132 מטרים | זווית האזימוט של השמש במיקום הפיקסל על הקרקע (WGS84). הזווית נמדדת מזרחה מהצפון. |
solar_zenith_angle |
מעלות | 8* | 80* | 11,132 מטרים | זווית האזימוט של הלוויין במיקום הפיקסל על הקרקע (WGS84). הזווית נמדדת מהאנך. |
מאפייני תמונה
מאפייני תמונה
| שם | סוג | תיאור |
|---|---|---|
| ALGORITHM_VERSION | STRING0 | גרסת האלגוריתם שמשמשת כדי לעבד את הנתונים ברמה 2. הגרסה הזו אינה תלויה במעבד (ה-framework), וזאת כדי להתאים ללוחות הזמנים של השקות המוצרים השונים. |
| BUILD_DATE | STRING | התאריך, במילישניות מאז 1 בינואר 1970, שבו נוצרה התוכנה ששימשה לעיבוד של L2. |
| HARP_VERSION | INT | הגרסה של הכלי HARP ששימשה להעברת נתוני ה-L2 לרשת של מוצר L3. |
| INSTITUTION | STRING | המוסד שבו בוצע עיבוד הנתונים מ-L1 ל-L2. |
| L3_PROCESSING_TIME | INT | התאריך, במילישניות מאז 1 בינואר 1970, שבו Google עיבדה את נתוני L2 ל-L3 באמצעות harpconvert. |
| LAT_MAX | DOUBLE | קו הרוחב המקסימלי של הנכס (במעלות). |
| LAT_MIN | DOUBLE | קו הרוחב המינימלי של הנכס (במעלות). |
| LON_MAX | DOUBLE | קו האורך המקסימלי של הנכס (במעלות). |
| LON_MIN | DOUBLE | קו האורך המינימלי של הנכס (במעלות). |
| ORBIT | INT | מספר המסלול של הלוויין בזמן איסוף הנתונים. |
| PLATFORM | STRING | שם הפלטפורמה שאספה את הנתונים. |
| PROCESSING_STATUS | STRING | סטטוס העיבוד של המוצר ברמה הגלובלית, שמבוסס בעיקר על הזמינות של נתוני קלט נוספים. הערכים האפשריים הם Nominal ו-Degraded. |
| PROCESSOR_VERSION | STRING | גרסת התוכנה ששימשה לעיבוד L2, כמחרוזת בפורמט "major.minor.patch". |
| PRODUCT_ID | STRING | המזהה של מוצר ה-L2 ששימש ליצירת הנכס הזה. |
| PRODUCT_QUALITY | STRING | אינדיקטור שמציין אם איכות המוצר נפגמה או לא. הערכים המותרים הם Nominal ו-Degraded. |
| SENSOR | STRING | שם החיישן שאסף את הנתונים. |
| SPATIAL_RESOLUTION | STRING | רזולוציה מרחבית בנקודת הנאדיר. ברוב המוצרים היא |
| TIME_REFERENCE_DAYS_SINCE_1950 | INT | מספר הימים מ-1 בינואר 1950 עד למועד איסוף הנתונים. |
| TIME_REFERENCE_JULIAN_DAY | DOUBLE | היום היוליאני בזמן איסוף הנתונים. |
| TRACKING_ID | STRING | מזהה ייחודי אוניברסלי (UUID) של קובץ המוצרים ברמה L2. |
| CLOUD_MODE | מחרוזת | מציין באיזה מודל נעשה שימוש כדי ליצור את מערך הנתונים הזה: מודל CAL (Clouds As Layers) או מודל CRB (Clouds as Reflecting Boundaries). הערכים החוקיים של המאפיין הזה הם cal או crb, כאשר cal הוא ברירת המחדל. |
| STATUS_MET_2D | מחרוזת | קבוצת הנתונים הזו משתמשת בנתוני עזר דינמיים מ-European Centre for Medium-Range Weather Forecasts (המרכז האירופי לתחזיות מזג אוויר לטווח בינוני). אם נעשה שימוש בנתוני ECMWF, הערך בשדה הזה יהיה Nominal. אם לא נעשה שימוש בנתוני ECMWF, נעשה שימוש בפתרון חלופי, והערך בשדה הזה יהיה Fallback. |
תנאים והגבלות
תנאים והגבלות
השימוש בנתוני Sentinel כפוף לתנאים ולהגבלות על נתוני Sentinel בתוכנית Copernicus.
סיור עם פלטפורמת Earth Engine
עורך קוד (JavaScript)
var collection = ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_CLOUD') .select('cloud_fraction') .filterDate('2019-06-01', '2019-06-02'); var band_viz = { min: 0, max: 0.95, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P Cloud'); Map.setCenter(-58.14, -10.47, 2);