- डेटासेट की उपलब्धता
- 2018-07-04T13:34:21Z–2026-07-15T19:17:40Z
- डेटासेट बनाने वाली कंपनी
- यूरोपियन यूनियन/ईएसए/कोपरनिकस
- अपडेट होने की अवधि
- दो दिन
- टैग
ब्यौरा
OFFL/L3_AER_AI
यह डेटासेट, यूवी ऐरोसॉल इंडेक्स (यूवीएआई) की हाई रिज़ॉल्यूशन वाली तस्वीरों का ऑफ़लाइन संग्रह उपलब्ध कराता है. इसे ऐब्ज़ॉर्बिंग ऐरोसोल इंडेक्स (एएआई) भी कहा जाता है.
एएआई, रेले स्कैटरिंग में वेवलेंथ पर निर्भर बदलावों पर आधारित होता है. ये बदलाव दो वेवलेंथ के लिए यूवी स्पेक्ट्रल रेंज में मापे जाते हैं. ऑब्ज़र्व किए गए और मॉडल किए गए रिफ़्लेक्टेंस के बीच का अंतर एएआई होता है. जब एएआई पॉज़िटिव होता है, तो इसका मतलब है कि हवा में धूल और धुएं जैसे यूवी किरणों को सोखने वाले ऐरोसॉल मौजूद हैं. इससे धूल के तूफ़ान, ज्वालामुखी की राख, और बायोमास जलने से निकलने वाले ऐरोसॉल प्लूम के विकास को ट्रैक करने में मदद मिलती है.
इस्तेमाल की गई वेवलेंथ में ओज़ोन का ऐब्ज़ॉर्पशन बहुत कम होता है. इसलिए, ऐरोसॉल ऑप्टिकल थिकनेस मेज़रमेंट के उलट, बादलों की मौजूदगी में भी एएआई का हिसाब लगाया जा सकता है. इसलिए, दुनिया भर के डेटा को रोज़ इकट्ठा किया जा सकता है.
इस L3 AER_AI प्रॉडक्ट के लिए, absorbing_aerosol_index का हिसाब, 354 एनएम और 388 एनएम की वेवलेंथ पर, एक साथ दो मेज़रमेंट करके लगाया जाता है. COPERNICUS/S5P/OFFL/L3_SO2 प्रॉडक्ट के absorbing_aerosol_index की गिनती, 340 एनएम और 380 एनएम की वेवलेंथ का इस्तेमाल करके की जाती है.
ओएफ़एफ़एल L3 प्रॉडक्ट
ओएफ़एफ़एल L3 प्रॉडक्ट बनाने के लिए, हम प्रॉडक्ट के बॉउंडिंग बॉक्स में डेटा वाले हिस्से ढूंढते हैं. इसके लिए हम इस तरह के निर्देश का इस्तेमाल करते हैं:
harpconvert --format hdf5 --hdf5-compression 9
-a 'absorbing_aerosol_index_validity>50;derive(datetime_stop {time})'
S5P_OFFL_L2__AER_AI_20181030T213916_20181030T232046_05427_01_010200_20181105T210529.nc
grid_info.h5
इसके बाद, हम पूरे डेटा को एक बड़े मोज़ेक में मर्ज कर देते हैं. यह मोज़ेक बनाने के लिए हम पिक्सल के लिए क्षेत्र के हिसाब से औसत वैल्यू निकालते हैं. अलग-अलग समय के लिए, इन पिक्सल की वैल्यू अलग-अलग हो सकती है. हम मोज़ेक से, टाइल का एक सेट बनाते हैं. इसमें ऑर्थोरेक्टिफ़ाइड रास्टर डेटा होता है.
एक टाइल के लिए harpconvert को कॉल करने का उदाहरण:
harpconvert --format hdf5 --hdf5-compression 9
-a 'absorbing_aerosol_index_validity>50;derive(datetime_stop {time});
bin_spatial(2001, 50.000000, 0.01, 2001, -120.000000, 0.01);
keep(absorbing_aerosol_index,sensor_altitude,sensor_azimuth_angle,
sensor_zenith_angle,solar_azimuth_angle,solar_zenith_angle)'
S5P_OFFL_L2__AER_AI_20181030T213916_20181030T232046_05427_01_010200_20181105T210529.nc
output.h5
सेंटिनल-5 प्रीकर्सर
सेंटिनल-5 प्रीकर्सर, एक सैटलाइट है. इसे यूरोपियन स्पेस एजेंसी ने 13 अक्टूबर, 2017 को लॉन्च किया था. इसका मकसद, वायु प्रदूषण पर नज़र रखना है. इस पर मौजूद सेंसर को अक्सर ट्रॉपोमी (ट्रोपोस्फ़ेरिक मॉनिटरिंग इंस्ट्रुमेंट) कहा जाता है.
CH4 को छोड़कर, सेंटिनल-5 प्रीकर्सर (एस5पी) के सभी डेटासेट के दो वर्शन होते हैं: नियर रीयल-टाइम (एनआरटीआई) और ऑफ़लाइन (ओएफ़एल). CH4 सिर्फ़ ओएफ़एफ़एल के तौर पर उपलब्ध है. एनआरटीआई ऐसेट, ऑफ़लाइन ऐसेट की तुलना में कम क्षेत्र को कवर करती हैं. हालांकि, डेटा हासिल करने के बाद ये ऐसेट तेज़ी से दिखती हैं. ऑफ़लाइन ऐसेट में एक ऑर्बिट का डेटा होता है. इसमें सिर्फ़ एक गोलार्ध का डेटा होता है, क्योंकि पृथ्वी का आधा हिस्सा अंधेरे में रहता है.
डेटा में गड़बड़ी की वजह से, अक्सर वर्टिकल कॉलम की नेगेटिव वैल्यू देखी जाती हैं. ऐसा खास तौर पर, बिना प्रदूषण वाले इलाकों या कम SO2 उत्सर्जन वाले इलाकों में होता है. हमारा सुझाव है कि आप इन वैल्यू को फ़िल्टर न करें. हालांकि, आउटलायर फ़िल्टर किए जा सकते हैं. जैसे, -0.001 mol/m^2 से कम वाले वर्टिकल कॉलम.
सेंटिनल 5पी के लेवल 2 (L2) के मूल डेटा को समय के हिसाब से बांटा जाता है, न कि अक्षांश/देशांतर के हिसाब से. Earth Engine में डेटा डालने के लिए, हर सेंटिनल 5पी L2 प्रॉडक्ट को L3 में बदला जाता है. हर ऑर्बिट में एक ग्रिड को रखा जाता है. इसका मतलब है कि सभी प्रॉडक्ट के लिए एग्रीगेशन नहीं किया जाता.
एंटीमेरिडियन के बीच मौजूद सोर्स प्रॉडक्ट, _1 और _2 सफ़िक्स वाली दो Earth Engine ऐसेट के तौर पर डाले जाते हैं.
bin_spatial ऑपरेशन का इस्तेमाल करके, harpconvert टूल से L3 में कन्वर्ज़न किया जाता है. सोर्स डेटा को फ़िल्टर करके, ऐसे पिक्सल हटाए जाते हैं जिनकी क्यूए वैल्यू इनसे कम होती है:
- एईआर_एआई के लिए 80%
- NO2 के tropospheric_NO2_column_number_density बैंड के लिए 75%
- O3 और SO2 को छोड़कर, बाकी सभी डेटासेट के लिए 50%
O3_TCL प्रॉडक्ट को सीधे तौर पर डाला जाता है. इसके लिए, harpconvert नहीं चलाया जाता.
बैंड
बैंड
पिक्सल का साइज़: 1113.2 मीटर (सभी बैंड)
| नाम | इकाई | कम से कम | ज़्यादा से ज़्यादा | पिक्सल का साइज़ | ब्यौरा |
|---|---|---|---|---|---|
absorbing_aerosol_index |
-21* | 39* | 1113.2 मीटर | यह वायुमंडल में ऐरोसॉल की मौजूदगी को मापने का तरीका है. यूवीएआई इंडेक्स, किसी वेवलेंथ पेयर के लिए, अल्ट्रावायलेट (यूवी) स्पेक्ट्रल रेंज में स्पेक्ट्रल कंट्रास्ट पर आधारित होता है. इसमें, ऑब्ज़र्व किए गए और मॉडल किए गए रिफ़्लेक्टेंस के बीच का अंतर, रेज़िडुअल वैल्यू में दिखता है. जब यह रेज़िडुअल पॉज़िटिव होता है, तो इसका मतलब है कि इसमें धूल और धुएं जैसे यूवी सोखने वाले ऐरोसॉल मौजूद हैं. इसे अक्सर ऐब्ज़ॉर्बिंग ऐरोसॉल इंडेक्स (एएआई) कहा जाता है. बादलों की वजह से, बहुत कम रेज़िडुअल वैल्यू मिलती हैं. साथ ही, बहुत ज़्यादा नेगेटिव रेज़िडुअल वैल्यू से पता चलता है कि हवा में ऐसे ऐरोसॉल मौजूद हैं जो यूवी को सोखते नहीं हैं. इनमें सल्फ़ेट ऐरोसॉल भी शामिल हैं. सैटलाइट से लिए गए ऐरोसॉल ऑप्टिकल थिकनेस के मेज़रमेंट के उलट, बादलों की मौजूदगी में भी एएआई का हिसाब लगाया जा सकता है. इससे रोज़ाना, दुनिया भर के डेटा को इकट्ठा किया जा सकता है. यह रेगिस्तानी धूल, ज्वालामुखी के विस्फोट से निकली राख, और बायोमास के जलने से निकलने वाले धुएं से बने एयरोसोल प्लूम के विकास को ट्रैक करने के लिए सबसे सही तरीका है. ज़्यादा जानकारी के लिए, एटीबीडी देखें. |
|
sensor_altitude |
m | 828543* | 856078* | 1113.2 मीटर | जियोडेसिक सब-सैटलाइट पॉइंट (WGS84) के हिसाब से, सैटलाइट की ऊंचाई. |
sensor_azimuth_angle |
डिग्री | -180* | 180* | 1113.2 मीटर | ग्राउंड पिक्सल लोकेशन (WGS84) पर सैटलाइट का ऐज़िमथ ऐंगल; ऐंगल को उत्तर से पूर्व की ओर मापा गया है. |
sensor_zenith_angle |
डिग्री | 0.098* | 66.87* | 1113.2 मीटर | ग्राउंड पिक्सल लोकेशन (WGS84) पर उपग्रह का ज़ेनिथ ऐंगल; ऐंगल को वर्टिकल से दूर मापा गया है. |
solar_azimuth_angle |
डिग्री | -180* | 180* | 1113.2 मीटर | ग्राउंड पिक्सल लोकेशन (WGS84) पर सूरज का ऐज़िमथ ऐंगल; ऐंगल को उत्तर से पूर्व की ओर मापा गया है. |
solar_zenith_angle |
डिग्री | 8* | 88* | 1113.2 मीटर | ग्राउंड पिक्सल लोकेशन (WGS84) पर सैटलाइट का ज़ेनिथ ऐंगल; ऐंगल को वर्टिकल से दूर मापा गया है. |
इमेज प्रॉपर्टी
इमेज प्रॉपर्टी
| नाम | टाइप | ब्यौरा |
|---|---|---|
| ALGORITHM_VERSION | STRING | L2 प्रोसेसिंग में इस्तेमाल किए गए एल्गोरिदम का वर्शन. यह प्रोसेसर (फ़्रेमवर्क) के वर्शन से अलग होता है, ताकि अलग-अलग प्रॉडक्ट के लिए रिलीज़ के अलग-अलग शेड्यूल को शामिल किया जा सके. |
| BUILD_DATE | STRING | वह तारीख जिस दिन L2 प्रोसेसिंग करने के लिए इस्तेमाल किया जाने वाला सॉफ़्टवेयर बनाया गया था. 1 जनवरी 1970 से इसे मिलीसेकंड के तौर पर दिखाया जाता है. |
| HARP_VERSION | INT | HARP टूल का वह वर्शन जिसका इस्तेमाल L2 डेटा को L3 प्रॉडक्ट में ग्रिड करने के लिए किया गया. |
| INSTITUTION | STRING | वह संस्थान जहां L1 से L2 तक डेटा प्रोसेस किया गया था. |
| L3_PROCESSING_TIME | INT | वह तारीख जिस दिन Google ने harpconvert का इस्तेमाल करके, L2 डेटा को L3 में प्रोसेस किया था. 1 जनवरी 1970 से इसे मिलीसेकंड के तौर पर दिखाया जाता है. |
| LAT_MAX | DOUBLE | ऐसेट का ज़्यादा से ज़्यादा अक्षांश (डिग्री). |
| LAT_MIN | DOUBLE | ऐसेट का कम से कम अक्षांश (डिग्री). |
| LON_MAX | DOUBLE | ऐसेट का ज़्यादा से ज़्यादा देशांतर (डिग्री). |
| LON_MIN | DOUBLE | ऐसेट का कम से कम देशांतर (डिग्री). |
| ORBIT | INT | डेटा हासिल करने के समय, सैटलाइट का ऑर्बिट नंबर. |
| PLATFORM | STRING | उस प्लैटफ़ॉर्म का नाम जिसने डेटा हासिल किया. |
| PROCESSING_STATUS | STRING | दुनिया भर में प्रॉडक्ट की प्रोसेसिंग का स्टेटस. यह मुख्य रूप से, सहायक इनपुट डेटा की उपलब्धता पर आधारित होता है. संभावित वैल्यू ये हैं: "सामान्य" और "खराब". |
| PROCESSOR_VERSION | STRING | L2 प्रोसेसिंग के लिए इस्तेमाल किए गए सॉफ़्टवेयर का वर्शन, "major.minor.patch" फ़ॉर्म की स्ट्रिंग के तौर पर. |
| PRODUCT_ID | STRING | इस ऐसेट को जनरेट करने के लिए इस्तेमाल किए गए L2 प्रॉडक्ट का आईडी. |
| PRODUCT_QUALITY | STRING | यह इंडिकेटर बताता है कि प्रॉडक्ट की क्वालिटी खराब हुई है या नहीं. "खराब" और "सामान्य" वैल्यू का इस्तेमाल किया जा सकता है. |
| SENSOR | STRING | उस सेंसर का नाम जिसने डेटा हासिल किया. |
| SPATIAL_RESOLUTION | STRING | नीचे की ओर स्पेशल रिज़ॉल्यूशन. ज़्यादातर प्रॉडक्ट के लिए यह |
| TIME_REFERENCE_DAYS_SINCE_1950 | INT | 1 जनवरी, 1950 से डेटा हासिल करने की तारीख तक के दिन. |
| TIME_REFERENCE_JULIAN_DAY | DOUBLE | जूलियन पीरियड के हिसाब से, डेटा किस दिन (संख्या में) हासिल किया गया. |
| TRACKING_ID | STRING | L2 प्रॉडक्ट फ़ाइल के लिए यूयूआईडी. |
इस्तेमाल की शर्तें
इस्तेमाल की शर्तें
Sentinel डेटा का इस्तेमाल, Copernicus Sentinel डेटा के इस्तेमाल से जुड़े नियम और शर्तों से नियंत्रित होता है.
Earth Engine की मदद से एक्सप्लोर करें
कोड एडिटर (JavaScript)
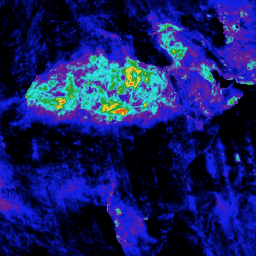
var collection = ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_AER_AI') .select('absorbing_aerosol_index') .filterDate('2019-06-01', '2019-06-06'); var band_viz = { min: -1, max: 2.0, palette: ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'] }; Map.addLayer(collection.mean(), band_viz, 'S5P Aerosol'); Map.setCenter(-118.82, 36.1, 5);
import ee import geemap.core as geemap
Colab (Python)
collection = ( ee.ImageCollection('COPERNICUS/S5P/OFFL/L3_AER_AI') .select('absorbing_aerosol_index') .filterDate('2019-06-01', '2019-06-06') ) band_viz = { 'min': -1, 'max': 2.0, 'palette': ['black', 'blue', 'purple', 'cyan', 'green', 'yellow', 'red'], } m = geemap.Map() m.add_layer(collection.mean(), band_viz, 'S5P Aerosol') m.set_center(-118.82, 36.1, 5) m