- מפיק מערך הנתונים
- Copernicus
- תגים
תיאור
ה-TAC In Situ הוא מרכז מבוזר שמסודר לפי 7 אזורים אוקיאנוגרפיים: האוקיינוס הגלובלי ו-6 בריתות אזוריות של EUROGOOS. הפרויקט כולל 14 שותפים מ-11 מדינות באירופה. הוא לא מפעיל מערכת תצפית, ומסתמך על נתונים שממומנים באופן בלעדי ממקורות אחרים ולא מ-Copernicus Marine Service.
קבוצת הנתונים הזו מכילה תצפיות על זרמים בפני הים ממכשירי מכ"ם בתדר גבוה (HF). זרמים על פני הים שנמדדים באמצעות מכ"ם בתדר גבוה הם ממוצע של 0.3 עד 2.5 מ' העליונים של עמודת המים, בהתאם לתדר המרכזי של המכ"ם.
מערך הנתונים הזה מספק רכיבי מהירות כוללים. היא כוללת מפות עם רשת של שדות מהירות כוללים של זרם פני השטח, שמחושבים כממוצע על פני מרווח זמן. המהירויות הכוללות נגזרות באמצעות התאמה לא משוקללת של ריבועים פחותים שממפה מהירויות רדיאליות, שנמדדות על ידי תחנות מדידה נפרדות, לרשת קרטזית. התוצר הסופי הוא מפה של הרכיבים האזוריים והמרידיאניים של זרמי האוקיינוס ברשת רגילה באזור החפיפה של שתי תחנות מכ"ם או יותר.
פרטים נוספים זמינים במדריך למשתמש.
סכימת טבלה ב-BigQuery
סכימת טבלה
| שם | סוג | תיאור |
|---|---|---|
| שעה | DATETIME | התאריך והשעה של התצפית |
| LATITUDE | נקודה צפה בדיוק כפול (Double Precision Floating Point) | קו הרוחב של התצפית |
| LONGITUDE | נקודה צפה בדיוק כפול (Double Precision Floating Point) | קו האורך של התצפית |
| עומק | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מספר רמות העומק |
| DEPH | נקודה צפה בדיוק כפול (Double Precision Floating Point) | עומק התצפית (מ') |
| GDOP | נקודה צפה בדיוק כפול (Double Precision Floating Point) | Geometric Dilution of Precision |
| DDNS_QC | INT | סימון בקרת איכות ל-DDNS.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| CSPD_QC | INT | סימון בקרת איכות של CSPD.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| VART_QC | INT | סימון בקרת איכות של VART.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| GDOP_QC | INT | סימון בקרת איכות ל-GDOP.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| QCflag | INT | סימון האיכות הכולל |
| EWCT | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מהירות המים בים לכיוון מזרח (מ'/שנייה) |
| NSCT | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מהירות המים בים לכיוון צפון (מ'/שנייה) |
| EWCS | נקודה צפה בדיוק כפול (Double Precision Floating Point) | סטיית תקן של מהירות המים העיליים מזרחה (מ'/שנייה) |
| NSCS | נקודה צפה בדיוק כפול (Double Precision Floating Point) | סטיית תקן של מהירות המים בים לכיוון צפון (מ'/ש) |
| CCOV | נקודה צפה בדיוק כפול (Double Precision Floating Point) | שונות משותפת של מהירות המים העיליים בים (מ"ר^2/שנייה^2) |
| POSITION_QC | INT | סימון לבקרת איכות של המיקום.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| SDN_STATION | מחרוזת | מזהה התחנה |
| TIME_QC | INT | סימון בקרת האיכות של TIME.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| DEPH_QC | INT | סימון בקרת האיכות של DEPH.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| גיאומטריה | גיאומטריה | המיקום הגיאוגרפי של התצפית |
תנאים והגבלות
הנתונים מסופקים בחינם על ידי Copernicus Marine Service. המשתמשים צריכים לציין את Copernicus Marine Service כמקור הנתונים כשמשתמשים בנתונים. פרטים נוספים על תנאי השימוש זמינים באתר Copernicus Marine Service.
תנאים והגבלות
תנאים והגבלות
הנתונים מסופקים בחינם על ידי Copernicus Marine Service. המשתמשים צריכים לציין את Copernicus Marine Service כמקור הנתונים כשמשתמשים בנתונים. פרטים נוספים על תנאי השימוש זמינים באתר Copernicus Marine Service.
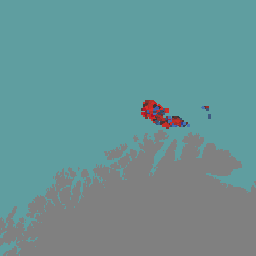
סיור עם פלטפורמת Earth Engine
עורך קוד (JavaScript)
// This script loads a large BigQuery table and performs per-feature operations, // which can make it take longer to load than typical Earth Engine scripts. var dataset = ee.FeatureCollection.loadBigQueryTable("earth-engine-public-data.insitu_nrt_currents.radar_total_latest") .filter(ee.Filter.date('2025-04-01', '2025-04-02')) .filter(ee.Filter.notNull(['EWCT'])); dataset = dataset.map(function(f) { var val = ee.Number(f.get('EWCT')).float(); return f.buffer(3000) // 3km radius circles .set('EWCT', val); }); var image = dataset.reduceToImage({ properties: ['EWCT'], reducer: ee.Reducer.first() }); var visParams = { min: -0.5, max: 0.5, palette: ['a50026', 'd73027', '333333', '4575b4', '313695'], }; Map.setCenter(25.5, 71.5, 6); Map.addLayer(image, visParams, 'Radar Total EWCT');