- מפיק מערך הנתונים
- Copernicus
- תגים
תיאור
ה-TAC In Situ הוא מרכז מבוזר שמסודר לפי 7 אזורים אוקיאנוגרפיים: האוקיינוס הגלובלי ו-6 בריתות אזוריות של EUROGOOS. הפרויקט כולל 14 שותפים מ-11 מדינות באירופה. הוא לא מפעיל מערכת תצפית, ומסתמך על נתונים שממומנים באופן בלעדי ממקורות אחרים ולא מ-Copernicus Marine Service.
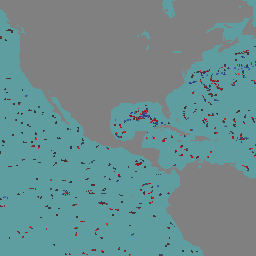
מערך הנתונים הזה נגזר מנתוני המסלול המקוריים מ-Argo GDAC (מרכז עולמי לאיסוף נתונים). בשנת 2020, מרכז GDAC הפיץ נתונים מיותר מ-15,000 מצופי Argo. זרם במעמקי האוקיינוס מחושב על סמך סחיפה של מצופי מדידה בעומק החנייה, וזרם על פני האוקיינוס מחושב על סמך סחיפה של מצופי מדידה על פני המים.
פרטים נוספים זמינים במדריך למשתמש.
סכימת טבלה ב-BigQuery
סכימת טבלה
| שם | סוג | תיאור |
|---|---|---|
| שעה | DATETIME | התאריך והשעה של התצפית |
| עומק | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מספר רמות העומק |
| LATITUDE | נקודה צפה בדיוק כפול (Double Precision Floating Point) | קו הרוחב של התצפית |
| LONGITUDE | נקודה צפה בדיוק כפול (Double Precision Floating Point) | קו האורך של התצפית |
| PRES | נקודה צפה בדיוק כפול (Double Precision Floating Point) | לחץ מייצג של התצפית הנוכחית. יכול להיות 0 או לחץ עומק חנייה (דציבר). |
| TRAJECTORY | מחרוזת | מזהה מסלול |
| PRES_QC | INT | סימון בקרת איכות של PRES.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| EWCT | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מהירות מי הים ממערב למזרח בלחץ מייצג (מ'/שנייה) |
| EWCT_QC | INT | סימון בקרת איכות של EWCT.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| NSCT | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מהירות זרם מי הים מדרום לצפון בלחץ המייצג (מ'/שנייה) |
| NSCT_QC | INT | סימון בקרת איכות של NSCT.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| TIME_QC | INT | סימון בקרת האיכות של TIME.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| POSITION_QC | INT | סימון לבקרת איכות של המיקום.
שימו לב: ערך תקין של המשתנה המתאים כולל ביט QC ששווה ל-1, 2, 5, 7 או 8. |
| CYCLE_NUMBER | נקודה צפה בדיוק כפול (Double Precision Floating Point) | מספר המחזור של מצוף Argo |
| GROUNDED | מחרוזת | מציין את האומדן הטוב ביותר לגבי המגע של המצוף עם הקרקע באותו מחזור. המוסכמות מתוארות בהמשך:
|
| משך הקורס | נקודה צפה בדיוק כפול (Double Precision Floating Point) | משך המדידה |
| גיאומטריה | גיאומטריה | המיקום הגיאוגרפי של התצפית |
תנאים והגבלות
הנתונים מסופקים בחינם על ידי Copernicus Marine Service. המשתמשים צריכים לציין את Copernicus Marine Service כמקור הנתונים כשמשתמשים בנתונים. פרטים נוספים על תנאי השימוש זמינים באתר Copernicus Marine Service.
תנאים והגבלות
תנאים והגבלות
הנתונים מסופקים בחינם על ידי Copernicus Marine Service. המשתמשים צריכים לציין את Copernicus Marine Service כמקור הנתונים כשמשתמשים בנתונים. פרטים נוספים על תנאי השימוש זמינים באתר Copernicus Marine Service.
סיור עם פלטפורמת Earth Engine
עורך קוד (JavaScript)
var dataset = ee.FeatureCollection.loadBigQueryTable("earth-engine-public-data.insitu_nrt_currents.argo_latest") .filter(ee.Filter.date('2025-04-01', '2025-05-01')); dataset = dataset.map(function(f) { var val = ee.Number(f.get('EWCT')).float(); return f.buffer(8000) // 8km radius circles .set('EWCT', val); }); var image = dataset.reduceToImage({ properties: ['EWCT'], reducer: ee.Reducer.first() }); var visParams = { min: -0.5, max: 0.5, palette: ['a50026', 'd73027', '333333', '4575b4', '313695'], }; Map.setCenter(-100.5, 30.2, 3); Map.addLayer(image, visParams, 'Global INSITU Argo EWCT');