
여기 엔드포인트는 선형 비행운 감지 및 비행운 감지 확률을 반환합니다.
감지
감지된 비행운을 나타내는 선분입니다.
감지는 관측 비행운 감지 데이터만 제공하며 특정 항공편에 매핑되지 않습니다. 하지만 시간 범위, 경계 상자, 위성 출처별로 필터링할 수 있습니다.
감지 모델이 업그레이드되거나 읽기 사이에 데이터 백필이 발생할 수 있으므로 감지의 데이터 일관성은 보장할 수 없습니다.
감지 형식
감지는 FeatureCollection이 포함된 GeoJSON 형식입니다.
{
"type": "FeatureCollection",
"features": [
{
"type": "Feature",
"geometry": {
"type": "LineString",
"coordinates": [
[
90.23562622070312,
44.00904083251953
],
[
91.37249755859375,
43.36760711669922
]
]
},
"properties": {
"time": "2026-01-27T12:10:00+00:00",
"satellite_origin": "HIMAWARI-FULL-DISK"
}
},
{
"type": "Feature",
"geometry": {
"type": "LineString",
"coordinates": [
[
100.54035949707031,
3.5992228984832764
],
[
100.66291046142578,
3.370659112930298
]
]
},
"properties": {
"time": "2026-01-27T12:10:00+00:00",
"satellite_origin": "HIMAWARI-FULL-DISK"
}
},
...
]
}
감지 마스크
비행운 감지 확률을 나타내는 NetCDF입니다.
감지 마스크는 관측 비행운 감지 데이터만 제공하며 특정 항공편에 매핑되지 않습니다. 시간 범위, 경계 상자, 위성 출처별로 필터링할 수 있습니다. 선택적으로 위성 이미지 시간과 위성의 실제 픽셀 스캔 시간 간의 델타를 측정하는 픽셀당 스캔 시간 오프셋을 포함할 수 있습니다.
데이터 일관성은 보장할 수 없습니다 (앞서 감지에서 언급한 것과 동일한 이유).
감지 마스크 형식
예시 보기
참고
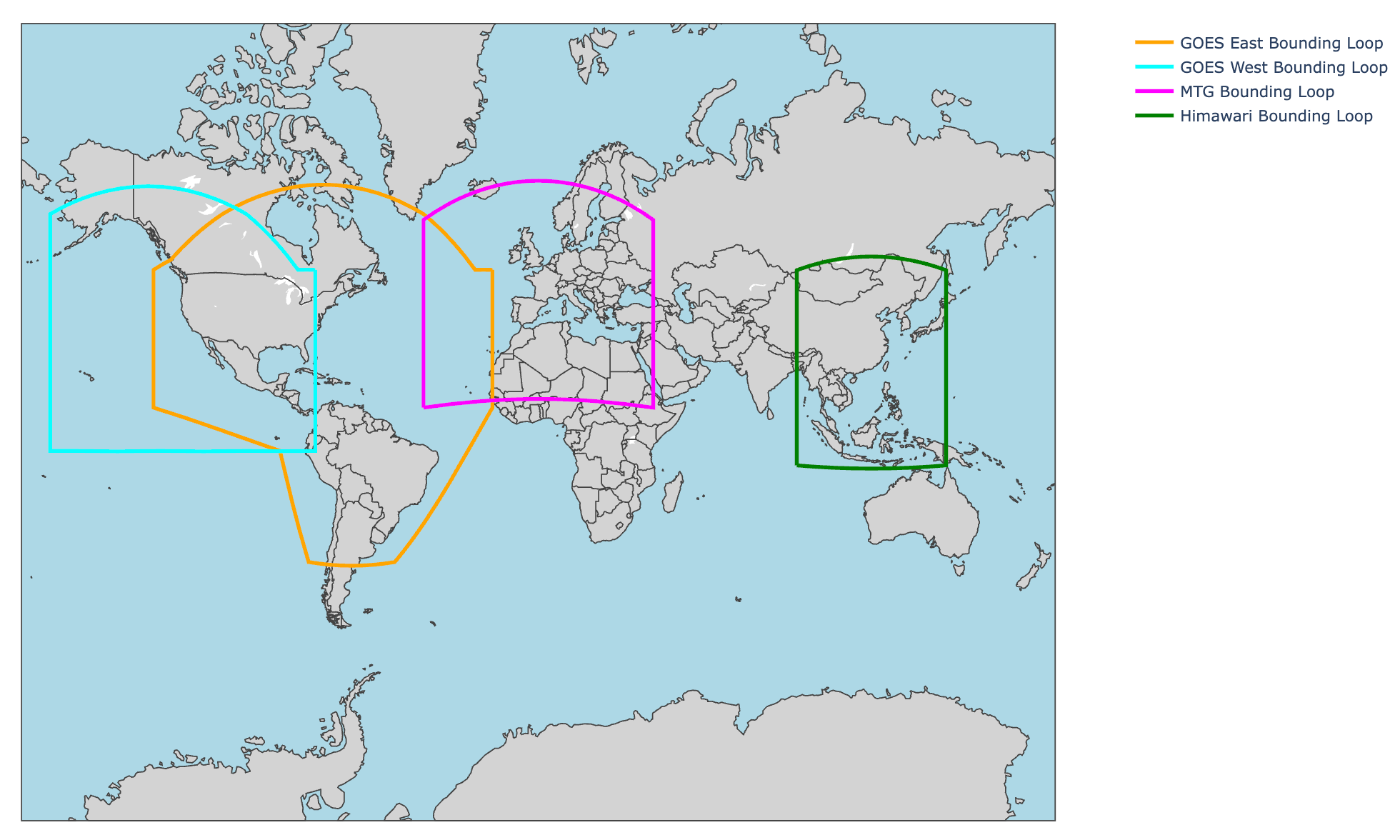
GetDetections의 경우 사용된 위성은 아래에 설명된 대로
바이너리 감지 식별을 위해 서로 다른 리전을 처리합니다.
라이선스
Detections API에서 노출되는 데이터는 CC BY-NC-SA 4.0에 따라 라이선스가 부여됩니다.