
ここで返されるエンドポイントは、線状の飛行機雲の検出と飛行機雲の検出確率です。
検出
検出された飛行機雲を表す線分。
検出では、観測された飛行機雲の検出データのみが提供され、特定のフライトにはマッピングされません。ただし、時間範囲、境界ボックス、衛星の原点でフィルタできます。
検出モデルがアップグレードされたり、読み取りの間にデータのバックフィルが発生したりする可能性があるため、検出のデータの一貫性は保証されません。
検出の形式
検出は、FeatureCollection を含む GeoJSON 形式です。
{
"type": "FeatureCollection",
"features": [
{
"type": "Feature",
"geometry": {
"type": "LineString",
"coordinates": [
[
90.23562622070312,
44.00904083251953
],
[
91.37249755859375,
43.36760711669922
]
]
},
"properties": {
"time": "2026-01-27T12:10:00+00:00",
"satellite_origin": "HIMAWARI-FULL-DISK"
}
},
{
"type": "Feature",
"geometry": {
"type": "LineString",
"coordinates": [
[
100.54035949707031,
3.5992228984832764
],
[
100.66291046142578,
3.370659112930298
]
]
},
"properties": {
"time": "2026-01-27T12:10:00+00:00",
"satellite_origin": "HIMAWARI-FULL-DISK"
}
},
...
]
}
検出マスク
飛行機雲の検出確率を表す NetCDF。
検出マスクでは、観測された飛行機雲の検出データのみが提供され、特定のフライトにはマッピングされません。時間範囲、境界ボックス、衛星の原点でフィルタできます。必要に応じて、ピクセルごとのスキャン時間オフセットを含めることができます。これは、衛星画像の時刻と衛星の実際のピクセル スキャン時刻の差を測定します。
データの一貫性は保証されません(検出で前述した理由と同じです)。
検出マスクの形式
例をご覧ください。
メモ
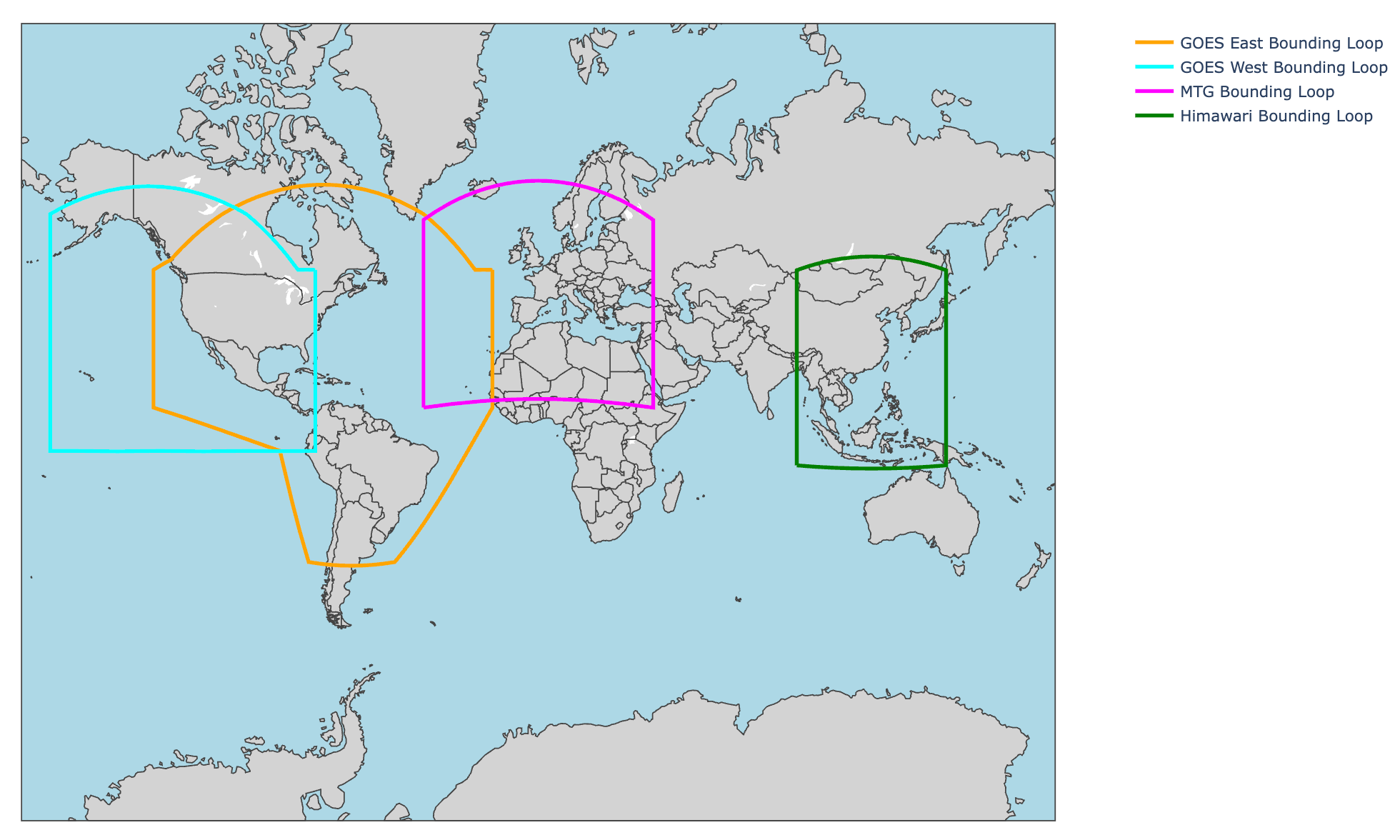
GetDetections の場合、使用される衛星は、以下に示すように、バイナリ検出 ID のために異なるリージョンを処理します。
ライセンス
Detections API によって公開されるデータは、CC BY-NC-SA 4.0 の下でライセンスされています。