
נקודות הקצה האלה מחזירות זיהויים לינאריים של שובלי התעבות ואת ההסתברויות לזיהוי שובלי התעבות.
זיהויים
קטעי קווים שמייצגים שובלי התעבות שזוהו.
הנתונים שמתקבלים מהזיהוי הם רק נתוני זיהוי של שובלי התעבות, והם לא ממופים לטיסות ספציפיות. עם זאת, אפשר לסנן אותם לפי טווחי זמן, תיבת תוחמת ומקורות לוויין.
חשוב לציין שלא ניתן להבטיח עקביות בנתונים לגבי זיהויים, כי יכול להיות שיהיו שדרוגים של מודלים לזיהוי או השלמות חלקיות של נתונים בין קריאות.
פורמט הזיהויים
הזיהויים הם בפורמט GeoJSON, והם מכילים את המידע הבא: FeatureCollection
{
"type": "FeatureCollection",
"features": [
{
"type": "Feature",
"geometry": {
"type": "LineString",
"coordinates": [
[
90.23562622070312,
44.00904083251953
],
[
91.37249755859375,
43.36760711669922
]
]
},
"properties": {
"time": "2026-01-27T12:10:00+00:00",
"satellite_origin": "HIMAWARI-FULL-DISK"
}
},
{
"type": "Feature",
"geometry": {
"type": "LineString",
"coordinates": [
[
100.54035949707031,
3.5992228984832764
],
[
100.66291046142578,
3.370659112930298
]
]
},
"properties": {
"time": "2026-01-27T12:10:00+00:00",
"satellite_origin": "HIMAWARI-FULL-DISK"
}
},
...
]
}
מסכות זיהוי
קובץ NetCDF שמייצג את ההסתברויות לזיהוי פסי התעבות.
מסכות הזיהוי מספקות רק נתוני זיהוי של שובלי התעבות שנצפו, ולא ממופות לטיסות ספציפיות. אפשר לסנן אותם לפי טווחי זמן, תיבת תוחמת ומקורות לוויין. אפשר גם לכלול היסטים של זמן הסריקה לכל פיקסל, שמודדים את הדלתא בין הזמן של תמונת הלוויין לבין זמן הסריקה בפועל של הפיקסל על ידי הלוויין.
שימו לב: אי אפשר להבטיח עקביות בנתונים (מאותן סיבות שצוינו קודם לגבי זיהויים).
פורמט של מסכות זיהוי
הערות
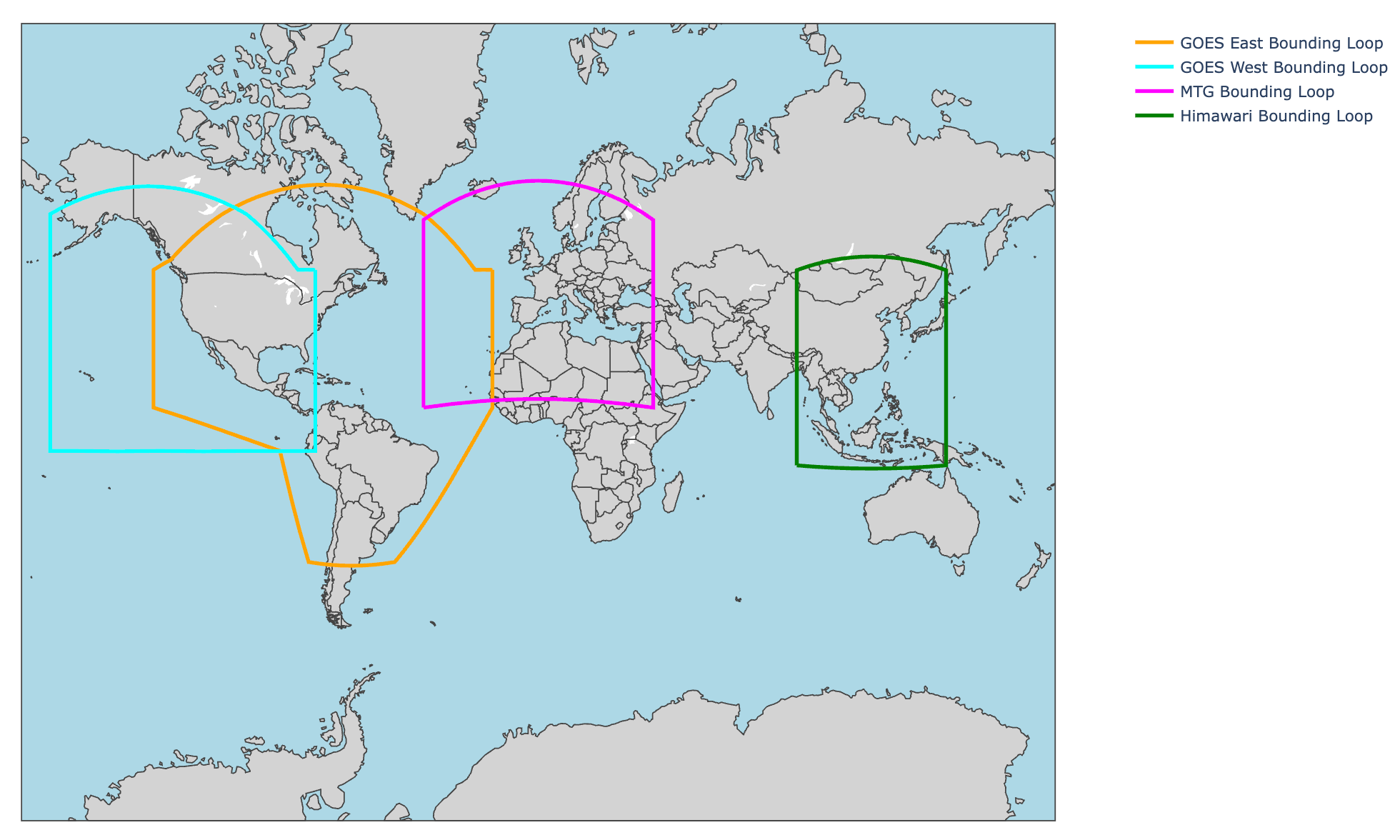
במקרה של GetDetections, הלוויינים שבהם נעשה שימוש מעבדים אזורים שונים לזיהוי בינארי, כמו שמתואר בהמשך:
רישיון
הנתונים שנחשפים על ידי Detections API מותרים לשימוש במסגרת רישיון CC BY-NC-SA 4.0.