Introduzione
A sostegno degli sforzi del governo brasiliano per implementare il codice forestale brasiliano e proteggere le foreste su terreni privati, Google ha prodotto due mappe base derivate dalle osservazioni satellitari SPOT: una mappa base visiva e una mappa base analitica (G-BFID v1.0).
Questi prodotti di immagini a mosaico stabiliscono una base di riferimento per il 22 luglio 2008, una data fondamentale ai sensi del codice forestale brasiliano per identificare le "aree consolidate", ovvero le regioni con occupazione umana o uso agricolo preesistenti. Derivati dall'archivio satellitare SPOT, questi set di dati mosaico forniscono un'alternativa a risoluzione più elevata rispetto ai dati Landsat di 30 metri tradizionalmente utilizzati per stabilire questa base di riferimento.
Per sintetizzare migliaia di immagini SPOT in mappe base unificate, le immagini sono state sottoposte a una routine di elaborazione composta da:
- Perfezionamento dei bordi per rimuovere gli artefatti di compressione.
- Normalizzazione radiometrica rispetto a una base di riferimento Landsat.
- Mascheramento delle nuvole (conservativo, manuale).
- Correzione del disallineamento (coregistrazione con un composito Landsat).
Per la composizione finale è stato utilizzato un metodo di mosaico deterministico anziché una riduzione statistica. I pixel sono stati stratificati in base alla risoluzione spaziale e alla cronologia delle missioni satellitari, dando la priorità alle osservazioni dei satelliti più recenti. Questa gerarchia di livelli è stata combinata con il ricampionamento del vicino più prossimo per stabilire una provenienza rigorosa dei dati. Di conseguenza, ogni pixel della basemap finale ha mantenuto la sua origine discreta ed è rimasto direttamente tracciabile fino a un'osservazione di origine specifica e ai relativi metadati.
Dati di origine
Specifiche di satelliti e sensori
Le mappe base G-BFID v1.0 derivano dai dati delle immagini SPOT (Satellite pour l’Observation de la Terre). Le missioni SPOT, gestite dal CNES e distribuite da Airbus, forniscono immagini ottiche ad alta risoluzione con una larghezza di scansione di 60 km. Questo progetto utilizza un archivio di immagini di tre satelliti specifici per stabilire la base di riferimento del 2008:
- SPOT 2 e 4:dotati di sensori HRV/HRVIR, che forniscono dati multispettrali con una risoluzione di 20 metri e dati pancromatici con una risoluzione di 10 metri.
- SPOT 5: dotato del sensore HRG, che offre una risoluzione spaziale notevolmente migliorata con dati multispettrali a una risoluzione di 10 metri e dati pancromatici a una risoluzione di 5 metri.
| SPOT 2 | SPOT 4 | SPOT 5 | |
|---|---|---|---|
| Multispettrale | 20 m | 20 m | 10 min |
| Pancromatico | 10 min | 10 min | 5 m |
| Bande spettrali | Verde, rosso, NIR | Verde, rosso, NIR, SWIR | Verde, rosso, NIR, SWIR |
Tabella 1. Specifiche tecniche per le missioni SPOT 2, 4 e 5.
Nota: Airbus produce un prodotto pancromatico "supermode" che può essere utilizzato per pan-sharpening delle immagini SPOT 5 con una risoluzione di 2,5 metri. La disponibilità di questi dati è molto limitata per le specifiche di questo progetto e non sono stati inclusi.
Raccolte Earth Engine di input
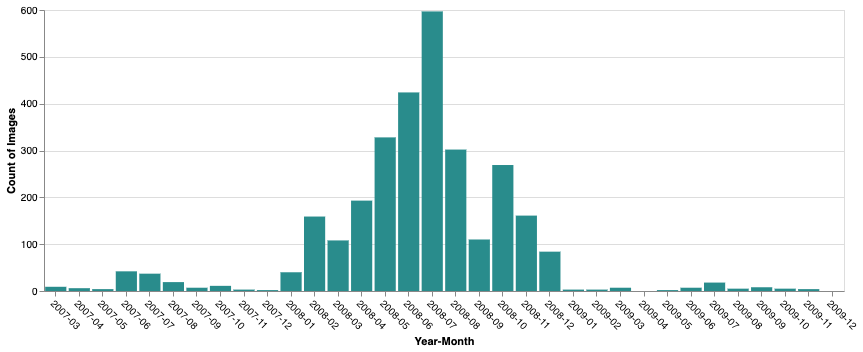
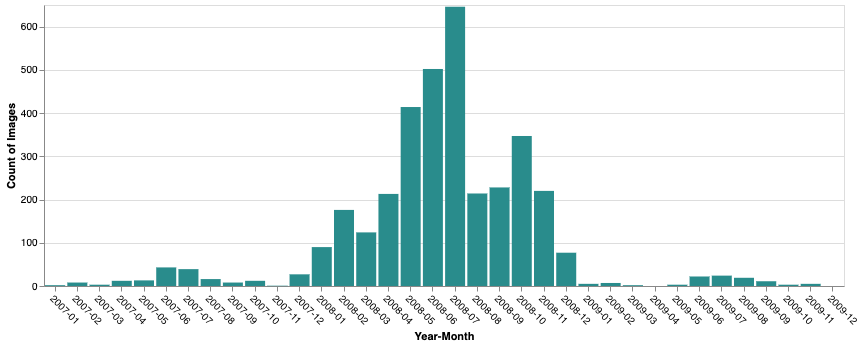
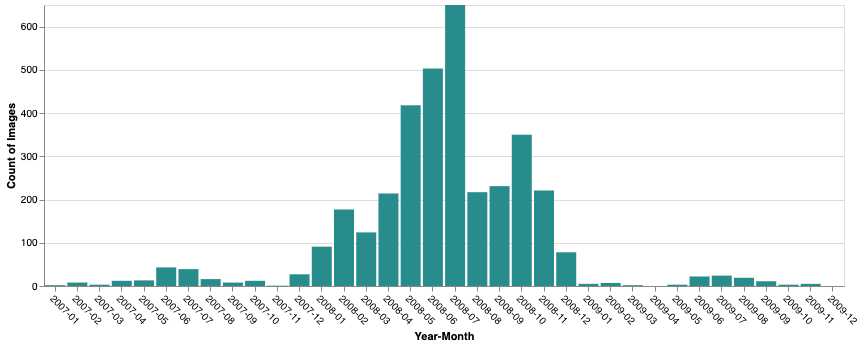
Sono stati importati ed elaborati tre prodotti di dati SPOT distinti per generare le basemap finali. Queste raccolte coprono il periodo dal 9 gennaio 2007 al 26 novembre 2009, fornendo la profondità temporale necessaria per superare i vincoli di copertura delle nuvole mantenendo una baseline ad alta risoluzione.
Selezione delle scene
Per supportare gli sforzi di protezione delle foreste su terreni privati registrati nel Registro ambientale rurale (CAR), è stata data la priorità alla copertura geografica del bioma amazzonico e dei cinque stati dell'"arco della deforestazione": Maranhão, Mato Grosso, Pará, Rondônia e Tocantins.
Per rispettare i requisiti del codice forestale brasiliano, è stata presa di mira una finestra temporale a metà del 2008. In base a questi criteri temporali e di copertura nuvolosa (< 50%), sono state identificate e inserite nel Data Catalog di Earth Engine per l'elaborazione un totale di 10.072 immagini di SPOT 2, 4 e 5.
Nota sulla composizione spettrale: i sensori SPOT 2, 4 e 5 non acquisiscono in modo nativo una banda spettrale blu. Per i prodotti a colori naturali, un banda blu sintetizzata, derivata dalle bande spettrali esistenti per approssimare una rappresentazione a colori reali, viene fornita dal distributore dei dati.
1. Pansharpening multispettrale a colori naturali
- Asset Earth Engine:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/PMS_NC/V1 - Numero di immagini:2977
- Intervallo di date: 1° marzo 2007 - 26 novembre 2009
- Descrizione: questo prodotto unisce la banda pancromatica a risoluzione più elevata alle bande multispettrali per produrre un'immagine RGB nitida a tre bande. Questa è la fonte preferita per la mappa base visiva.
2. Colore naturale multispettrale
- Asset Earth Engine:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS_NC/V1 - Numero di immagini:3536
- Intervallo di date: 9 gennaio 2007 - 26 novembre 2009
- Descrizione: un prodotto a colori pseudo-naturali a tre bande (RGB simulato) alla risoluzione multispettrale nativa. Questa raccolta viene utilizzata nella basemap visiva� come origine secondaria in cui i dati pansharpened potrebbero non essere disponibili.
3. Multispettrale
- Asset Earth Engine:
AIRBUS/SPOT_2_4_5/BRAZIL/2007_2009/MS/V1 - Numero di immagini:3559
- Intervallo di date: 9 gennaio 2007 - 26 novembre 2009
- Descrizione:l'origine della mappa di base analitica. Questa raccolta contiene le bande spettrali originali (inclusi il vicino infrarosso e l'infrarosso a onde corte, se disponibili) necessarie per calcolare gli indici di vegetazione (ad es. NDVI) ed eseguire la classificazione della copertura.
Copertura geografica e lacune
L'obiettivo principale delle mappe base G-BFID v1.0 è stabilire una baseline ad alta risoluzione, quasi del 2008, per il territorio amministrativo del Brasile. Tuttavia, il mantenimento di una finestra temporale rigorosa (2007-2009) durante il filtraggio delle immagini di alta qualità e con poche nuvole ha comportato lacune spaziali, in particolare nelle regioni con copertura nuvolosa persistente.
Selezione delle scene e filtro della qualità
Per garantire l'integrità dei dati, è stato identificato un pool di candidati dal 2007 al 2009 con una copertura nuvolosa iniziale inferiore al 50%. Da queste, sono state acquisite poco più di 10.000 immagini,che sono state ulteriormente filtrate per escludere quelle con problemi di qualità significativi:
- Controllo di discontinuità: sono state escluse le immagini con telemetria o artefatti geometrici identificati manualmente, incluse le scene discontinue raggruppate dal fornitore di dati.
- QA cloud: scene rifiutate da analisti di immagini professionisti perché completamente coperte da nuvole o per altri motivi.
- Densità dei dati: sono state conservate solo le immagini con >10% di pixel validi (basemap visiva) rimanenti dopo la maschera delle nuvole (>5% per la basemap analitica).
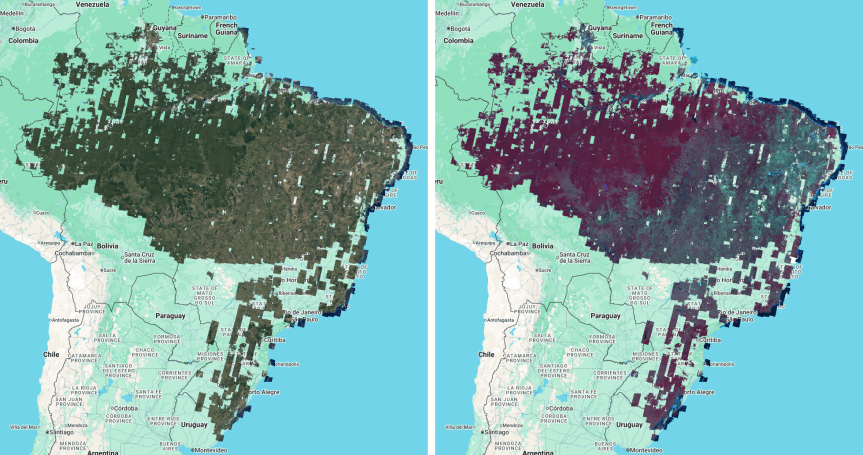
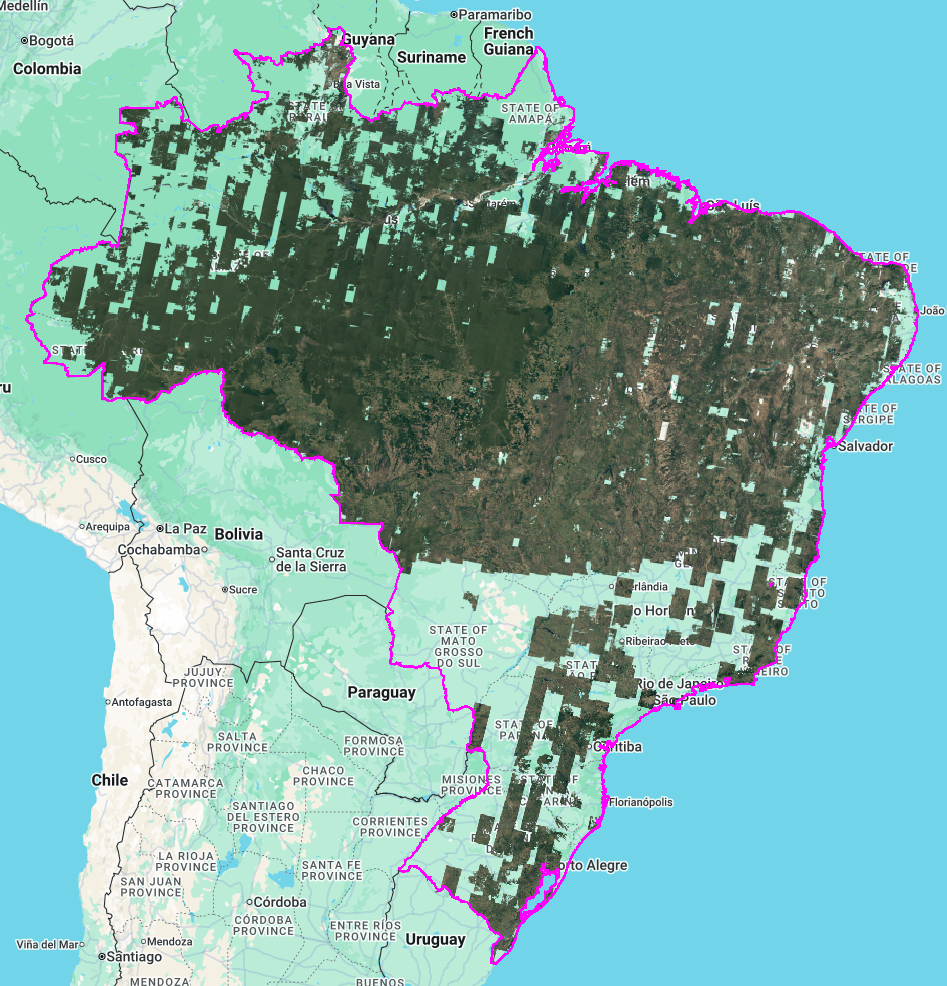
Distribuzione spaziale
Come mostrato nella Figura 5, i mosaici raggiungono la densità più elevata nell'"Arco della deforestazione" e nelle regioni settentrionali/centro-occidentali. Le aree trasparenti rappresentano le regioni in cui nessuna immagine SPOT 2, 4 o 5 ha superato i filtri di qualità elencati sopra nel periodo di tempo target o è stata mascherata dalle nuvole.
Copertura per stato
La Figura 6 fornisce una suddivisione stato per stato della copertura dei pixel valida. La copertura è quasi completa (> 95%) per stati come Rondônia e Mato Grosso, mentre gli stati del sud e alcune parti del nord-est mostrano una densità inferiore a causa dei vincoli dell'archivio e della maschera delle nuvole.
Il grafico mostra anche che la basemap visiva fornisce costantemente una copertura di pixel validi leggermente superiore rispetto alla basemap analitica in quasi tutti gli stati. Questa differenza esiste perché il prodotto Visual può utilizzare sia le raccolte di colori naturali pansharpened e multispettrali, mentre il prodotto Analytic deriva esclusivamente dalla raccolta multispettrale.
Metodologia di elaborazione
La metodologia di elaborazione per le mappe di base G-BFID v1.0 dà la priorità alla provenienza dei dati e all'integrità radiometrica per supportare le valutazioni della conformità al Forest Code. Questa sezione definisce innanzitutto l'architettura a mosaico generale e la logica di stratificazione utilizzata per preservare questa integrità, seguita dai passaggi cronologici di preelaborazione e normalizzazione applicati alle singole immagini di origine prima dell'assemblaggio finale.
Metodo a mosaico
Le basemap finali sono state create utilizzando un metodo a mosaico anziché riduttori statistici (come composizioni medie o mediane). Questo approccio garantisce che i prodotti finali mantengano i valori spettrali e le texture spaziali originali delle immagini di origine. Evitando la media di più osservazioni, il mosaico preserva la provenienza discreta di ogni pixel.
Logica di stratificazione
Le immagini di input sono state stratificate utilizzando una gerarchia che favorisce una risoluzione spaziale più elevata e missioni satellitari successive:
- Mappa base visiva:le immagini sono state ordinate in base alle dimensioni dei pixel (dando la priorità ai dati con la risoluzione più alta disponibile) e poi in base alla missione satellitare (dando la priorità ai dati dei satelliti SPOT più recenti).
- Mappa base analitica:le immagini sono state stratificate in base alla missione satellitare, dando la priorità alle osservazioni delle missioni SPOT successive per scegliere i dati migliori disponibili.
Integrità e tracciabilità
Ricampionamento:tutte le riproiezioni interne utilizzano il ricampionamento del vicino più prossimo. In questo modo si evitano gli effetti di smoothing interpolativo di altri metodi, garantendo che le proprietà radiometriche e spaziali originali dei pixel di origine non siano influenzate dai pixel vicini.
Tracciabilità dei dati:in entrambi i prodotti è inclusa una banda di metadati
dateper pixel. In questo modo, gli utenti possono identificare la data esatta dell'osservazione per qualsiasi posizione, garantendo la piena trasparenza per le valutazioni di conformità al codice forestale.
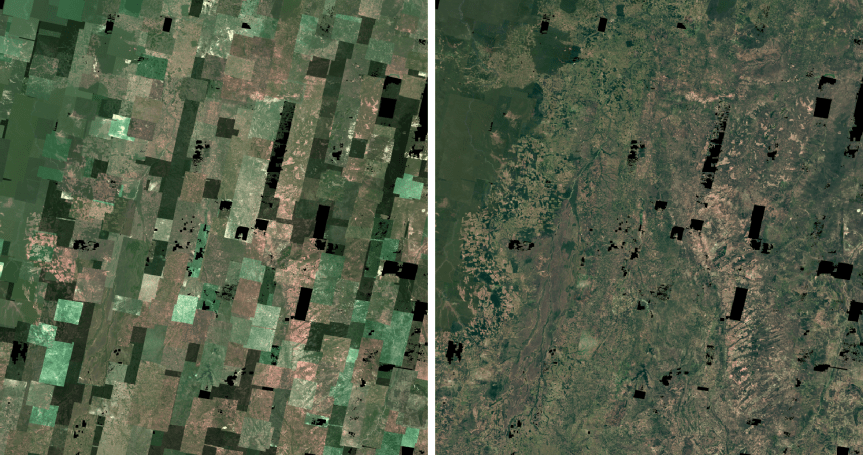
Perfezionamento dei bordi dell'immagine
Per garantire confini puliti tra le scene sovrapposte, è stato applicato un processo di perfezionamento dei bordi per rimuovere gli artefatti presenti nelle immagini di origine. Questi artefatti, che appaiono come pixel punteggiati o "rumorosi" lungo i bordi dell'immagine, erano una caratteristica della compressione con perdita nei dati forniti dal provider. Per risolvere questo problema, è stata applicata un'erosione minima focale di 2,5 pixel alle maschere delle immagini, rimuovendo gli artefatti di bassa qualità sui bordi e garantendo che nei mosaici finali vengano utilizzati solo dati validi (Figura 7).

Mascheramento delle nuvole
Per garantire la massima integrità dei dati per G-BFID v1.0, è stata implementata una procedura di mascheramento manuale nell'archivio delle immagini. Questo approccio è stato scelto rispetto ai metodi automatizzati per consentire un'esclusione più conservativa dei pixel interferiti da nuvole o altre interferenze atmosferiche.
Procedura di mascheramento
Analisti esperti hanno identificato le aree contenenti nuvole e artefatti atmosferici correlati. Per garantire che questi pixel problematici siano stati acquisiti completamente, è stata utilizzata una strategia di mascheramento conservativa utilizzando geometrie semplificate e grossolane. Anziché tracciare con precisione i perimetri delle singole nuvole, sono state mascherate aree rettangolari più grandi per garantire che il mosaico risultante rimanesse il più chiaro possibile.
Sebbene questo approccio sia intenzionalmente aggressivo, in quanto spesso rimuove i pixel validi adiacenti alle nuvole, è stato ritenuto necessario per fornire un prodotto di alta integrità per la baseline del 2008.
Policy di mascheramento e integrazione
Le maschere manuali sono state prodotte esclusivamente per le raccolte di immagini multispettrali e pansharpened a colori naturali. Poiché il prodotto a colori naturali multispettrale deriva dai dati multispettrali, queste maschere sono state poi propagate alle immagini multispettrali coincidenti durante l'elaborazione.
Qualsiasi immagine multispettrale che non avesse una controparte a colori naturali corrispondente e mascherata manualmente è stata esclusa dal mosaico finale. In questo modo, ogni pixel incluso nella suite G-BFID v1.0, indipendentemente dal tipo di prodotto, è stato ripulito dalle nuvole.
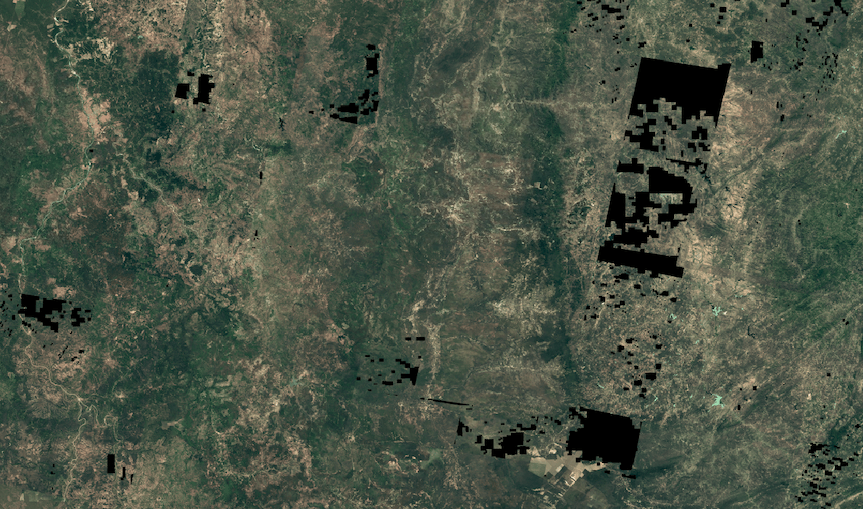
Interpretazione delle lacune nei dati
Le lacune trasparenti nei mosaici finali rappresentano le aree in cui non sono disponibili dati validi e di alta qualità nel periodo 2007-2009. Queste lacune sono il risultato di una combinazione della mascheratura manuale conservativa descritta in precedenza, del rifiuto iniziale di scene con copertura nuvolosa elevata (> 50%) o di una totale assenza di immagini di origine disponibili del fornitore per una regione specifica. Sebbene le lacune regionali più ampie riflettano in genere una mancanza di immagini disponibili dell'epoca del 2008, i distinti pattern "a blocchi" mostrati nella Figura 9 sono una conseguenza del mascheramento delle nuvole.
Correzione del disallineamento
È stato implementato un workflow di coregistrazione automatica per mitigare gli errori di registrazione significativi nelle immagini sorgente SPOT rispetto a una linea di base geografica derivata dai dati della raccolta Landsat 2.
Baseline di riferimento
È stato generato un mosaico di riferimento Landsat Collection 2 senza nuvole da utilizzare come immagine di riferimento per la coregistrazione. Questa immagine di riferimento è stata creata utilizzando un riduttore mediano sulle immagini Landsat 7 e 8 che si intersecano con il Brasile per il periodo 2006-2010. La banda rossa di Landsat è stata selezionata come target di registrazione principale per corrispondere alla banda rossa di SPOT.
Stima dello spostamento
L'algoritmo ee.Image.displacement è stato utilizzato per calcolare l'offset a livello di pixel tra i dati di origine SPOT e il riferimento Landsat.
- Parametri di ricerca:al modello di spostamento sono stati applicati uno scarto massimo di 500 m e un parametro di rigidità di 5.
- Aggregazione statistica: delta x ($dx$) e delta y ($dy$) e i valori di confidenza sono stati aggregati nell'intera area dell'immagine utilizzando un riduttore media.
- Calcolo della magnitudo:da queste statistiche aggregate è stata calcolata una stima dell'offset della magnitudo totale $M = \sqrt{dx^2 + dy^2}$ per rappresentare lo spostamento medio della scena.
Norme relative alle correzioni
Le scene sono state classificate e corrette in base alle statistiche di spostamento calcolate per dare la priorità ai miglioramenti significativi ed evitare l'introduzione di nuovi artefatti:
- Correzione automatica: le immagini che mostrano una magnitudo di spostamento $M > 30$ m con un punteggio di confidenza $C > 0,3$ sono state spostate automaticamente utilizzando i valori stimati $dx$ e $dy$.
- Valutazione manuale: per le scene con uno spostamento stimato molto elevato ($M > 100$ m) ma una confidenza bassa ($C \le 0,3$), è stata eseguita una revisione manuale. Le correzioni sono state accettate solo se la coregistrazione risultante mostrava un miglioramento definitivo rispetto al posizionamento originale.
- Esclusione: le scene che sono rimaste significativamente non registrate dopo il tentativo di correzione o quelle con caratteristiche insufficienti per una corrispondenza affidabile sono state escluse dal mosaico.
Implementazione e controllo qualità
Le immagini corrette sono state riproiettate utilizzando il ricampionamento del vicino più prossimo per preservare i valori radiometrici originali ed evitare gli effetti di smoothing dell'interpolazione bilineare o cubica.
Per garantire la tracciabilità spaziale, a ogni immagine è stata aggiunta una banda booleana coregistered, che è stata conservata nel mosaico finale. Questi metadati consentono agli utenti di
distinguere i pixel che hanno subito una regolazione spaziale da quelli mantenuti
nella posizione di pubblicazione originale.
Normalizzazione radiometrica
Per tenere conto delle diverse condizioni atmosferiche e delle differenze tra i sensori delle raccolte di origine SPOT, è stata applicata la normalizzazione radiometrica alle immagini che compongono i prodotti mosaico. Entrambe le mappe di base visive e analitiche utilizzano la corrispondenza dell'istogramma rispetto a una baseline target Landsat 2008 coerente.
Landsat è stato selezionato come riferimento rispetto ad alternative più grossolane come MODIS perché la sua risoluzione di 30 metri è più in linea con i dati SPOT da 5 a 20 metri. Questa somiglianza garantisce che gli istogrammi spettrali siano più rappresentativi in modo uniforme, consentendo un trasferimento radiometrico più accurato durante il processo di corrispondenza. La metodologia specifica per questa armonizzazione varia leggermente a seconda che il caso d'uso finale sia visivo o analitico.
Mappa base visiva
Per ridurre al minimo le discontinuità radiometriche tra le immagini adiacenti e garantire un aspetto quasi uniforme, è stato implementato un workflow di bilanciamento del colore utilizzando la corrispondenza dell'istogramma. I valori dei pixel sono stati aggiustati per corrispondere a una baseline target mosaico Landsat coerente del 2008.
La procedura segue questi passaggi:
- Mascheramento dell'analisi: per garantire statistiche stabili durante la corrispondenza dell'istogramma,
viene generata una maschera di analisi temporanea per escludere le aree che potrebbero distorcere i
dati. Questa maschera ha come target due funzionalità principali:
- Aree ad alta variazione: i pixel che superano il 95° percentile della differenza assoluta tra l'immagine SPOT e il mosaico di riferimento Landsat vengono esclusi.
- Masse d'acqua: l'elevata variabilità della riflettanza sull'acqua viene esclusa utilizzando il set di dati JRC Yearly Water Classification History. Il set di dati viene filtrato per l'anno 2008 e viene applicata una maschera inversa per garantire che solo le classi non acquatiche vengano conservate per l'analisi statistica.
- Generazione della tabella di ricerca (LUT): utilizzando i dati mascherati, vengono calcolati gli istogrammi cumulativi sia per le bande SPOT di origine sia per le bande Landsat di destinazione.
- Interpolazione: i valori dei pixel di origine vengono rimappati ai valori di destinazione utilizzando la LUT generata, allineando il profilo radiometrico dei dati SPOT con il riferimento Landsat 2008.
Mappa base analitica
L'elaborazione della basemap analitica rispecchia quella della basemap visiva, ma include la conversione dei valori DN in riflettanza top-of-atmosphere:
1. Conversione della riflettanza nella parte superiore dell'atmosfera (TOA)
I numeri digitali (DN) non elaborati di SPOT vengono convertiti in riflettanza TOA per tenere conto delle proprietà fisiche del sensore e della geometria solare:
- Calcolo della radianza: applicazione dei metadati di guadagno fisico e bias specifici per banda del fornitore.
- Normalizzazione della riflettanza: la radianza è normalizzata in base all'irradiazione solare, al coseno dell'angolo zenitale solare e alla distanza Terra-Sole per il giorno specifico di acquisizione.
2. Corrispondenza istogramma
Per ridurre ulteriormente le differenze radiometriche tra immagini SPOT disparate, viene applicato un flusso di lavoro di corrispondenza dell'istogramma:
Mascheramento dell'analisi: questo passaggio utilizza lo stesso mascheramento dell'analisi descritto nella sezione Basemap visiva precedente: escludendo i pixel di variazione >95° percentile e filtrando i pixel dell'acqua tramite la maschera di classificazione JRC inversa del 2008.
Armonizzazione: in modo simile alla basemap visiva, i valori dei pixel vengono rimappati tramite una tabella di ricerca per allineare il profilo radiometrico a un riferimento TOA di Landsat. In questo modo si stabilisce una coerenza radiometrica a livello di mosaico per l'addestramento di modelli di machine learning su larga scala e l'esecuzione di inferenze affidabili.
Limitazioni e problemi noti
Sebbene G-BFID v1.0 fornisca una base di riferimento ad alta risoluzione dell'era 2008, gli utenti devono essere consapevoli di diverse limitazioni inerenti all'archivio storico SPOT e alle metodologie di elaborazione utilizzate.
Completezza spaziale e lacune
Le mappe di base non forniscono una copertura geografica del 100% del Brasile. Esistono lacune in cui nessuna immagine soddisfaceva la rigida finestra temporale del progetto del 2008 (2007-2009), le soglie di copertura nuvolosa o gli standard di qualità. Queste lacune sono più frequenti nelle regioni con copertura nuvolosa persistente o con una frequenza di acquisizione satellitare storica inferiore. Per ulteriori dettagli, consulta la sezione Copertura geografica e lacune.
Risoluzione nativa variabile
Sebbene i prodotti finali vengano forniti con una dimensione nominale dei pixel di 5 metri (visivi) e 10 metri (analitici), le immagini di origine sono costituite da un mix di pixel nativi da 5 m, 10 m e 20 m. Poiché è stato utilizzato il ricampionamento del vicino più prossimo per preservare l'integrità spettrale, i confini tra le diverse risoluzioni potrebbero essere visibili.

Disallineamento residuo
Nonostante il flusso di lavoro di coregistrazione automatica, gli spostamenti spaziali potrebbero persistere in alcune aree. È più probabile che si verifichi un disallineamento residuo nelle regioni con un rilievo del terreno estremo o in aree forestali dense e omogenee in cui l'algoritmo non disponeva di punti di riferimento sufficienti per calcolare vettori di spostamento ad alta affidabilità.
Artefatti atmosferici e di nuvole
Il processo di mascheramento manuale delle nuvole è stato intenzionalmente conservativo e aggressivo; tuttavia, non è esaustivo. Gli utenti potrebbero riscontrare occasionalmente artefatti residui, come una foschia cirro molto sottile o piccole ombre di nuvole.
Incoerenza radiometrica e prestazioni ML
Sebbene la corrispondenza dell'istogramma sia stata utilizzata per ridurre al minimo le discontinuità radiometriche, rimane una variazione spettrale residua tra le immagini adiacenti. Per la classificazione automatica della copertura del suolo o per le applicazioni di machine learning, questa variabilità aumenta la varianza spettrale per un determinato tipo di copertura del suolo nel mosaico. Questo intervallo di dati più ampio può ridurre la precisione della separazione delle classi durante l'inferenza, il che potrebbe portare a tassi di errore più elevati.
Saturazione spettrale
In aree di luminosità estrema, come superfici urbane altamente riflettenti, tipi di terreno specifici o sabbia chiara, i pixel potrebbero raggiungere il limite massimo rilevabile del sensore. Questa "saturazione" comporta una perdita di texture e dettagli in queste posizioni specifiche.
Rapporti tra bande e indici di vegetazione alterati
Per ottenere un mosaico quasi perfetto, è stata applicata la corrispondenza dell'istogramma a ogni banda spettrale singolarmente, il che altera intrinsecamente i rapporti fisici originali tra le bande. Di conseguenza, il calcolo di indici comuni come l'NDVI o altre metriche del rapporto tra bande produrrà valori diversi dai set di dati di origine inalterati. Sebbene questi indici derivati possano ancora acquisire pattern spaziali relativi nel mosaico, non devono essere utilizzati per scopi assoluti, confronti tra sensori o analisi che si basano su soglie rigide degli indici.