- مدى توفُّر مجموعة البيانات
- 2015-06-27T00:00:00Z–2026-06-25T05:41:21.070000Z
- الجهة المنتِجة لمجموعة البيانات
- World Resources Institute Google
- العلامات
الوصف
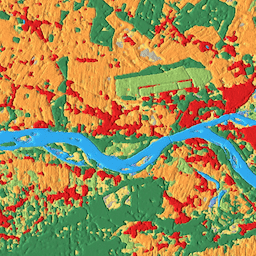
Dynamic World هي مجموعة بيانات لاستخدامات الأراضي والغطاء الأرضي (LULC) بدقة مكانية تبلغ 10 أمتار في الوقت الفعلي تقريبًا (NRT)، وتتضمّن احتمالات الفئات ومعلومات التصنيفات لتسع فئات.
تتوفّر توقّعات Dynamic World لمجموعة بيانات Sentinel-2 L1C من 2015-06-27 حتى الآن. ويتراوح معدّل إعادة زيارة Sentinel-2 بين يومَين و5 أيام حسب خط العرض. يتم إنشاء توقّعات Dynamic World لصور Sentinel-2 L1C التي تكون فيها CLOUDY_PIXEL_PERCENTAGE أقل من %35 أو تساويها. يتم إخفاء التوقّعات لإزالة الغيوم وظلالها باستخدام مزيج من S2 Cloud Probability وCloud Displacement Index وDirectional Distance Transform.
تحمل الصور في مجموعة Dynamic World أسماء مطابقة لأسماء مواد عرض Sentinel-2 L1C الفردية التي تم استخلاصها منها، مثلاً:
ee.Image('COPERNICUS/S2/20160711T084022_20160711T084751_T35PKT')
تحتوي على صورة مطابقة في Dynamic World باسم: ee.Image('GOOGLE/DYNAMICWORLD/V1/20160711T084022_20160711T084751_T35PKT').
يبلغ مجموع جميع نطاقات الاحتمالات باستثناء نطاق "التصنيف" 1.
لمزيد من المعلومات عن مجموعة بيانات Dynamic World والاطّلاع على أمثلة لـ إنشاء الصور المركّبة وحساب الإحصاءات الإقليمية واستخدام السلاسل الزمنية، يُرجى الاطّلاع على سلسلة البرامج التعليمية مقدمة إلى Dynamic World.
بما أنّ تقديرات فئات Dynamic World مستخلَصة من صور فردية باستخدام سياق مكاني من نافذة صغيرة متحركة، يمكن أن تكون "الاحتمالات" الأولى للغطاءات الأرضية المتوقّعة التي يتم تعريفها جزئيًا من خلال الغطاء بمرور الوقت، مثل المحاصيل، منخفضة نسبيًا في حال عدم توفّر ميزات مميّزة واضحة. قد تظهر هذه الظاهرة أيضًا على الأسطح العالية العائد في المناخات القاحلة والرمال والوهج الشمسي وما إلى ذلك.
لاختيار وحدات البكسل التي تنتمي بثقة إلى فئة Dynamic World فقط، يُنصح بإخفاء نواتج Dynamic World من خلال تحديد عتبة "الاحتمال" المقدَّر للتوقّع الأول.
النطاقات
النطاقات
حجم البكسل: 10 أمتار (جميع النطاقات)
| الاسم | الحد الأدنى | الشحن بأقصى سرعة | حجم البكسل | الوصف |
|---|---|---|---|---|
water |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالمياه |
trees |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالأشجار |
grass |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالعشب |
flooded_vegetation |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالنباتات التي غمرتها المياه |
crops |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالمحاصيل |
shrub_and_scrub |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالشجيرات والأحراش |
built |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالمباني |
bare |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالأراضي الجرداء |
snow_and_ice |
0 | 1 | 10 أمتار | الاحتمال المقدَّر للتغطية الكاملة بالثلوج والجليد |
label |
0 | 8 | 10 أمتار | فهرس النطاق الذي يتضمّن أعلى احتمال مقدَّر |
جدول فئات التصنيفات
| القيمة | اللون | الوصف |
|---|---|---|
| 0 | #419bdf | ماء |
| 1 | #397d49 | أشجار |
| 2 | #88b053 | عشب |
| 3 | #7a87c6 | flooded_vegetation |
| 4 | #e49635 | محاصيل |
| 5 | #dfc35a | shrub_and_scrub |
| 6 | #c4281b | مباني |
| 7 | #a59b8f | أراضٍ جرداء |
| 8 | #b39fe1 | snow_and_ice |
خصائص الصور
خصائص الصور
| الاسم | النوع | الوصف |
|---|---|---|
| dynamicworld_algorithm_version | STRING | سلسلة الإصدار التي تحدّد بشكلٍ فريد نموذج Dynamic World وعملية الاستنتاج المستخدَمة لإنشاء الصورة |
| qa_algorithm_version | STRING | سلسلة الإصدار التي تحدّد بشكلٍ فريد عملية إخفاء الغيوم المستخدَمة لإنشاء الصورة |
بنود الاستخدام
بنود الاستخدام
تم ترخيص مجموعة البيانات هذه بموجب رخصة المشاع الإبداعي CC-BY 4.0 وتتطلّب الإشارة إلى المصدر على النحو التالي: "تم إنتاج مجموعة البيانات هذه لمشروع Dynamic World من قِبل Google بالتعاون مع National Geographic Society و World Resources Institute".
تتضمّن بيانات معدَّلة من "كوبرنيكوس سنتينل" [من 2015 حتى الآن]. يُرجى الاطّلاع على الإشعار القانوني بشأن بيانات "سنتينل".
الاقتباسات
Brown, C.F., Brumby, S.P., Guzder-Williams, B. et al. Dynamic World, Near real-time global 10 m land use land cover mapping. Sci Data 9, 251 (2022). doi:10.1038/s41597-022-01307-4
معرِّفات العناصر الرقمية (DOI)
الاستكشاف باستخدام Earth Engine
أداة تعديل الرموز (JavaScript)
// Construct a collection of corresponding Dynamic World and Sentinel-2 for // inspection. Filter by region and date. var START = ee.Date('2021-04-02'); var END = START.advance(1, 'day'); var colFilter = ee.Filter.and( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END)); var dwCol = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(colFilter); var s2Col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); // Link DW and S2 source images. var linkedCol = dwCol.linkCollection(s2Col, s2Col.first().bandNames()); // Get example DW image with linked S2 image. var linkedImg = ee.Image(linkedCol.first()); // Create a visualization that blends DW class label with probability. // Define list pairs of DW LULC label and color. var CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice']; var VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1']; // Create an RGB image of the label (most likely class) on [0, 1]. var dwRgb = linkedImg .select('label') .visualize({min: 0, max: 8, palette: VIS_PALETTE}) .divide(255); // Get the most likely class probability. var top1Prob = linkedImg.select(CLASS_NAMES).reduce(ee.Reducer.max()); // Create a hillshade of the most likely class probability on [0, 1]; var top1ProbHillshade = ee.Terrain.hillshade(top1Prob.multiply(100)) .divide(255); // Combine the RGB image with the hillshade. var dwRgbHillshade = dwRgb.multiply(top1ProbHillshade); // Display the Dynamic World visualization with the source Sentinel-2 image. Map.setCenter(20.6729, 52.4305, 12); Map.addLayer( linkedImg, {min: 0, max: 3000, bands: ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C'); Map.addLayer( dwRgbHillshade, {min: 0, max: 0.65}, 'Dynamic World V1 - label hillshade');
import ee import geemap.core as geemap
Colab (Python)
# Construct a collection of corresponding Dynamic World and Sentinel-2 for # inspection. Filter by region and date. START = ee.Date('2021-04-02') END = START.advance(1, 'day') col_filter = ee.Filter.And( ee.Filter.bounds(ee.Geometry.Point(20.6729, 52.4305)), ee.Filter.date(START, END), ) dw_col = ee.ImageCollection('GOOGLE/DYNAMICWORLD/V1').filter(col_filter) s2_col = ee.ImageCollection('COPERNICUS/S2_HARMONIZED'); # Link DW and S2 source images. linked_col = dw_col.linkCollection(s2_col, s2_col.first().bandNames()); # Get example DW image with linked S2 image. linked_image = ee.Image(linked_col.first()) # Create a visualization that blends DW class label with probability. # Define list pairs of DW LULC label and color. CLASS_NAMES = [ 'water', 'trees', 'grass', 'flooded_vegetation', 'crops', 'shrub_and_scrub', 'built', 'bare', 'snow_and_ice', ] VIS_PALETTE = [ '419bdf', '397d49', '88b053', '7a87c6', 'e49635', 'dfc35a', 'c4281b', 'a59b8f', 'b39fe1', ] # Create an RGB image of the label (most likely class) on [0, 1]. dw_rgb = ( linked_image.select('label') .visualize(min=0, max=8, palette=VIS_PALETTE) .divide(255) ) # Get the most likely class probability. top1_prob = linked_image.select(CLASS_NAMES).reduce(ee.Reducer.max()) # Create a hillshade of the most likely class probability on [0, 1] top1_prob_hillshade = ee.Terrain.hillshade(top1_prob.multiply(100)).divide(255) # Combine the RGB image with the hillshade. dw_rgb_hillshade = dw_rgb.multiply(top1_prob_hillshade) # Display the Dynamic World visualization with the source Sentinel-2 image. m = geemap.Map() m.set_center(20.6729, 52.4305, 12) m.add_layer( linked_image, {'min': 0, 'max': 3000, 'bands': ['B4', 'B3', 'B2']}, 'Sentinel-2 L1C', ) m.add_layer( dw_rgb_hillshade, {'min': 0, 'max': 0.65}, 'Dynamic World V1 - label hillshade', ) m